40ピンPICマイコン18F47Q43で、メカナムホイール車を動かしました。

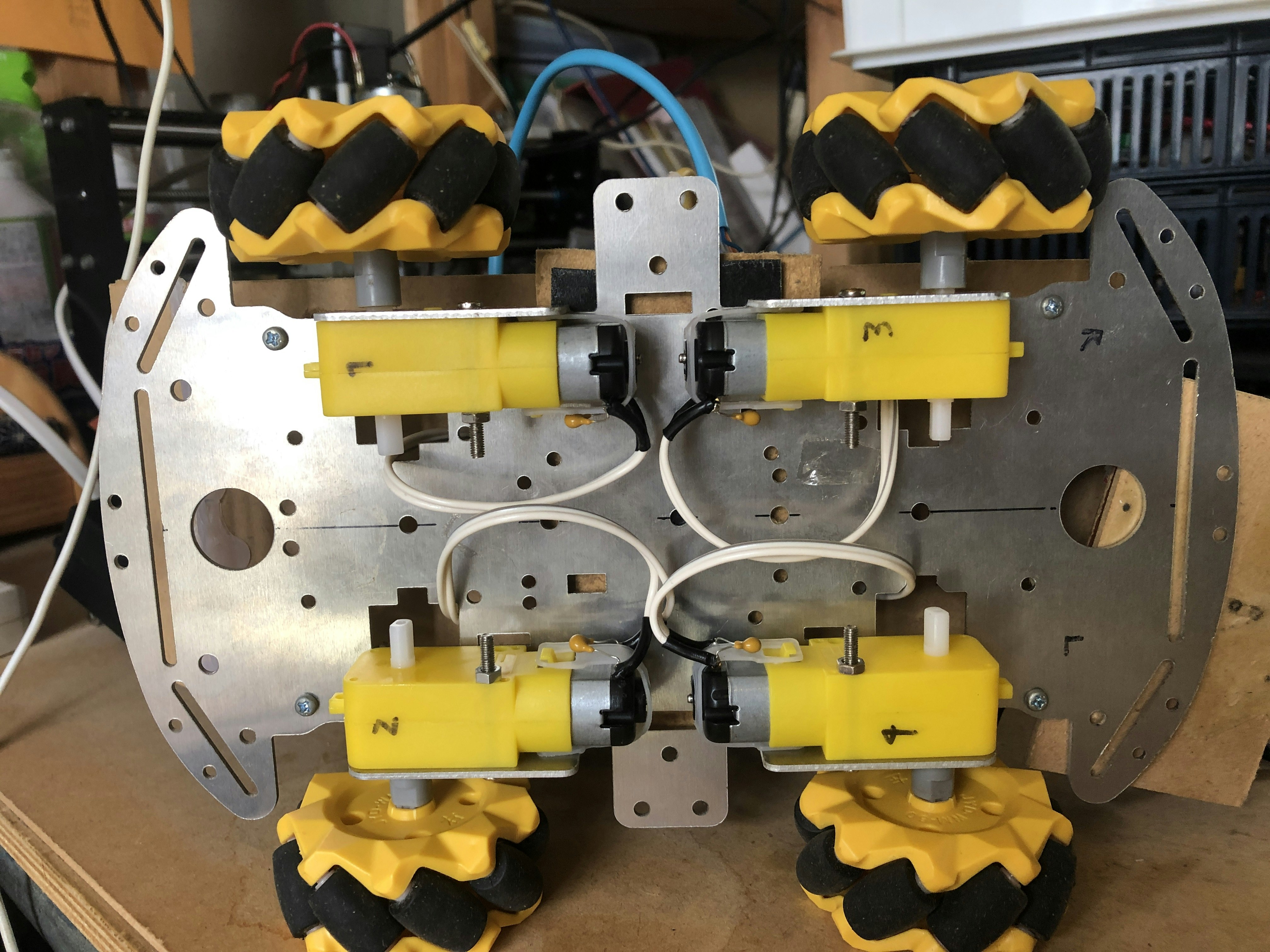
メカナム車本体
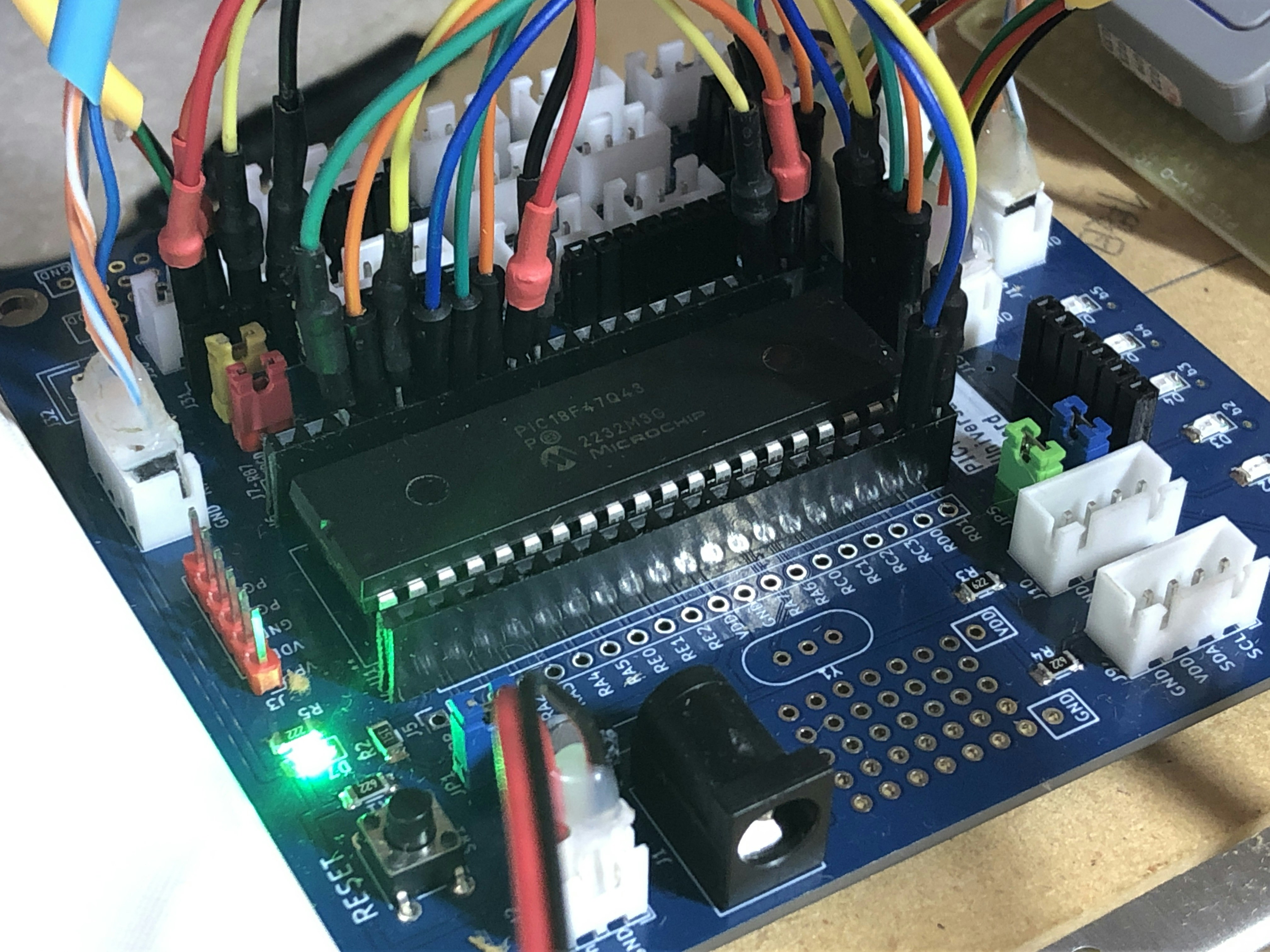
PIC18F47Q43+M5 ATOM Lite
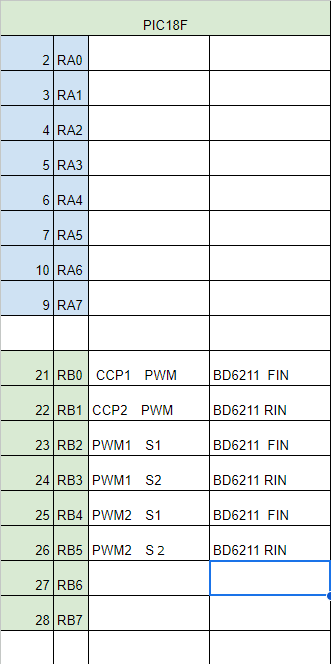
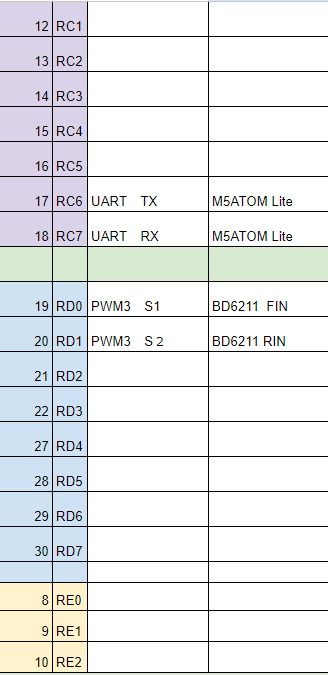
・18F47Q43のPWM1,2,3モジュールと、CCP1,2モジュールを使って、4輪駆動のメカナムホイール車を操作します。
・メカナム車本体受信用でATOM Liteを使用(シリアル通信で受信データをPICマイコンに送信)
無線コントローラ部
・M5AtomLiteを使用しています。
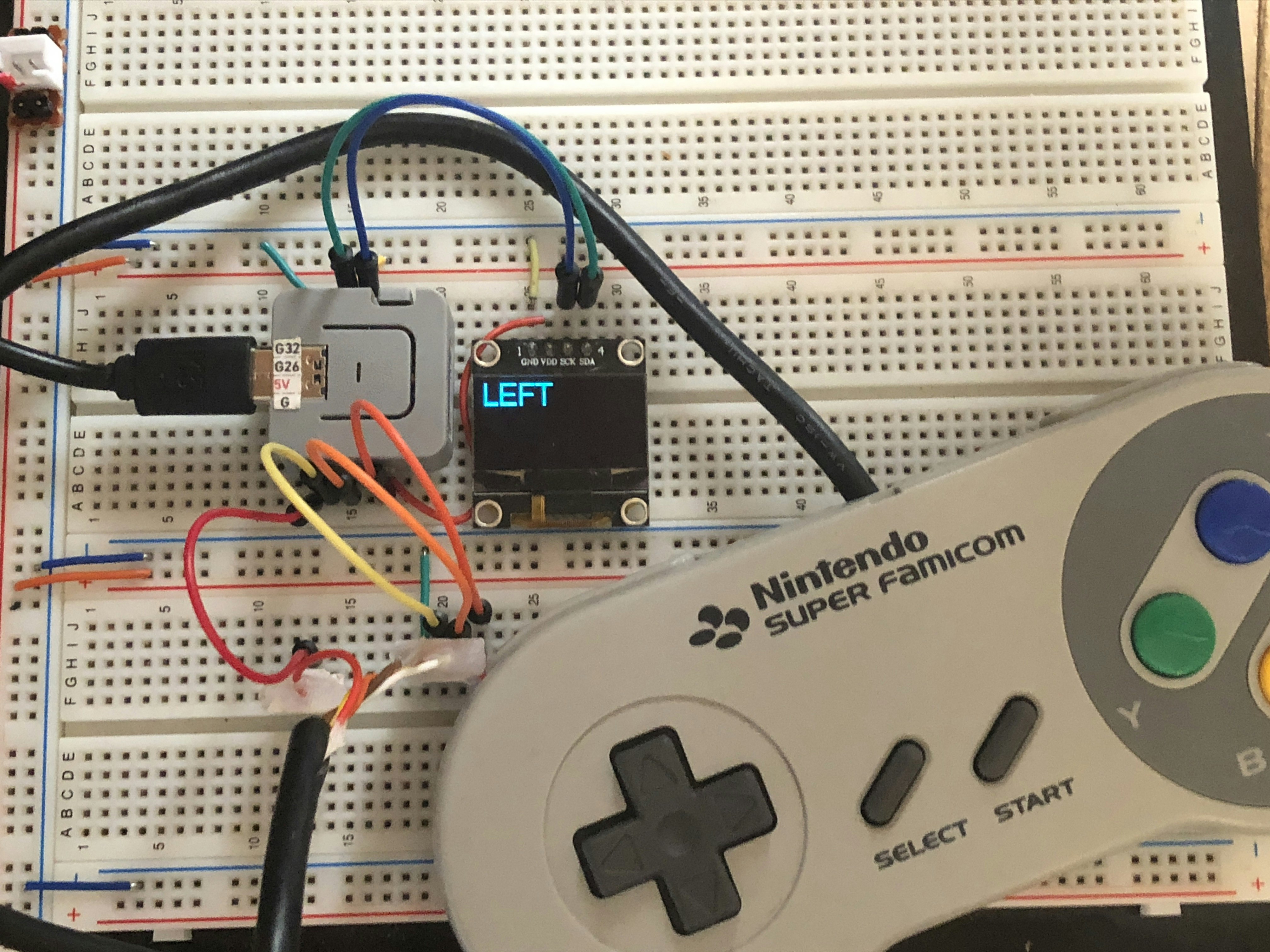
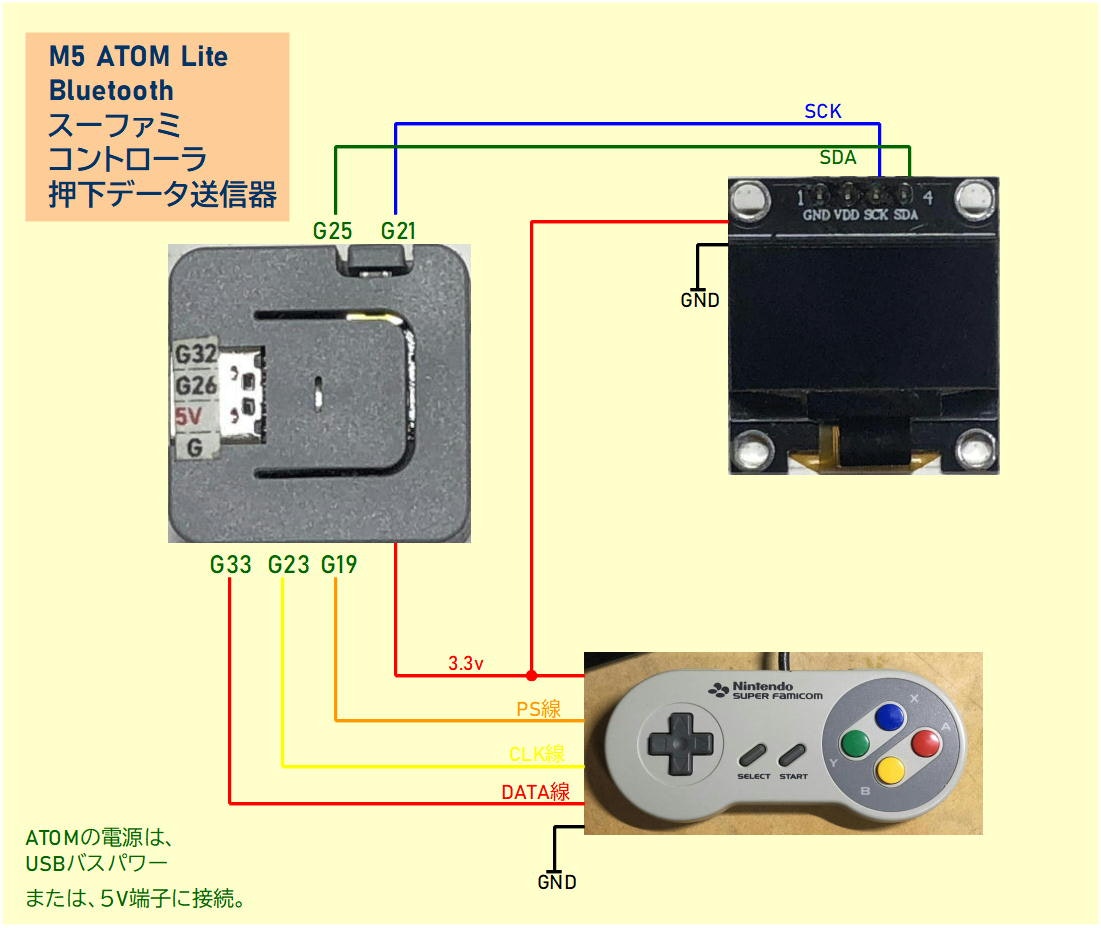
・スーパーファミコンコントローラボタン押下送信
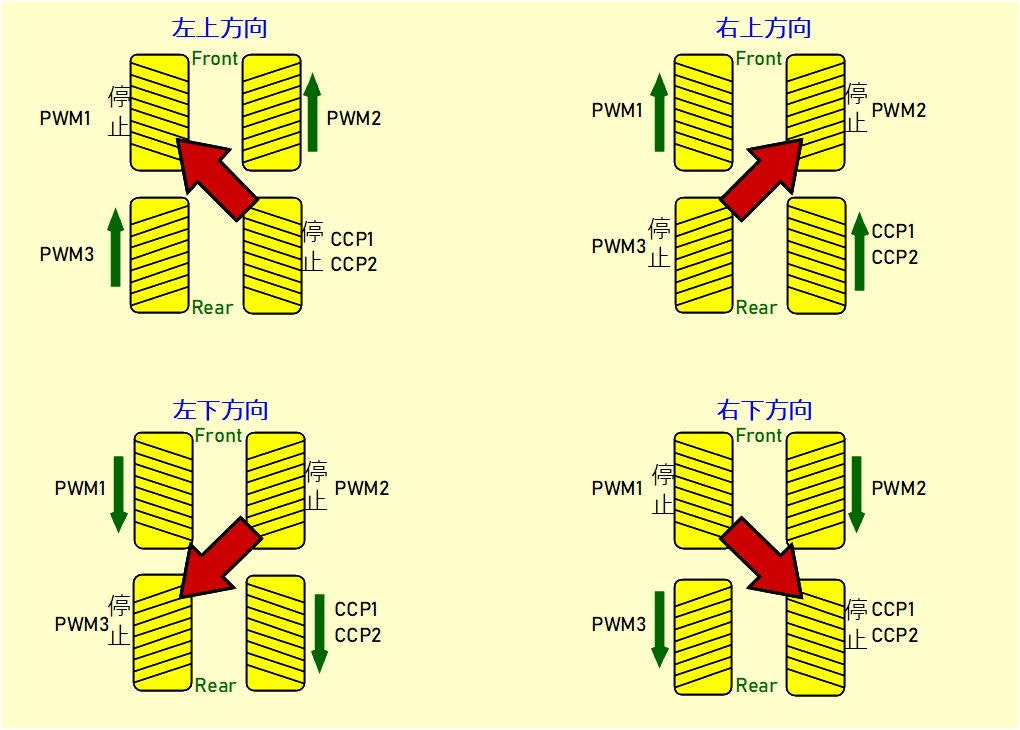
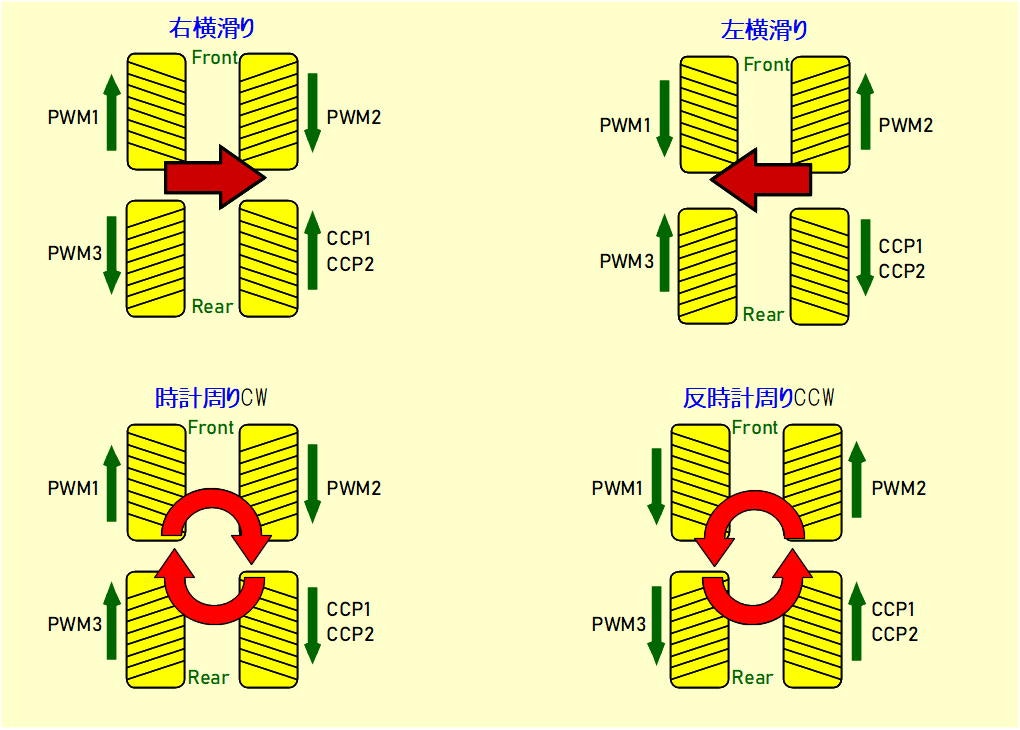
メカナムホイール車の動作
メカナムホイール車 DCモータ部
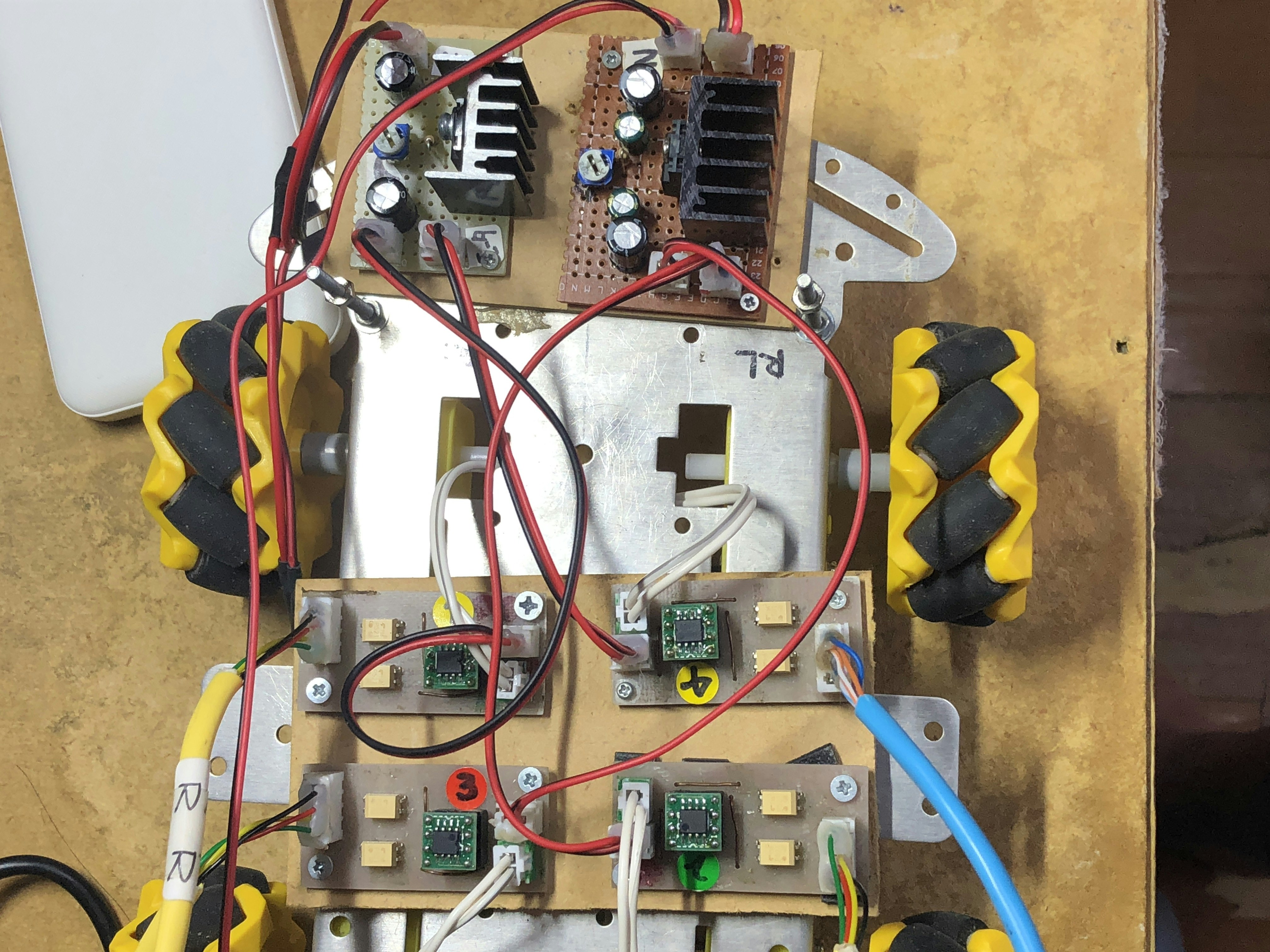
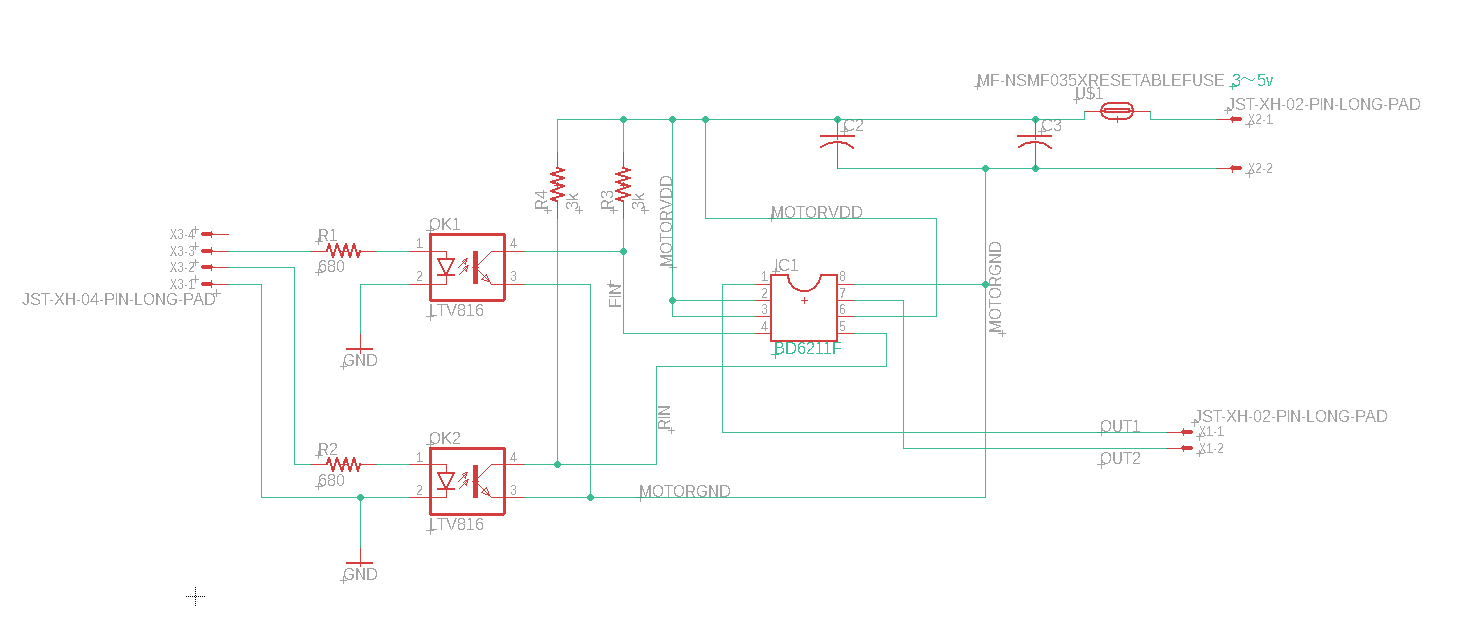
メカナムホイール車 モータ電源部とHブリッジ基板
HブリッジIC BD6211 を4つ使用して、DCモータを駆動しています。
LM371可変電源レギュレータでモータ電源電圧をコントロールしています。(2.5v~3v)
メカナムホイール車 マイコン部PIC18F47Q43
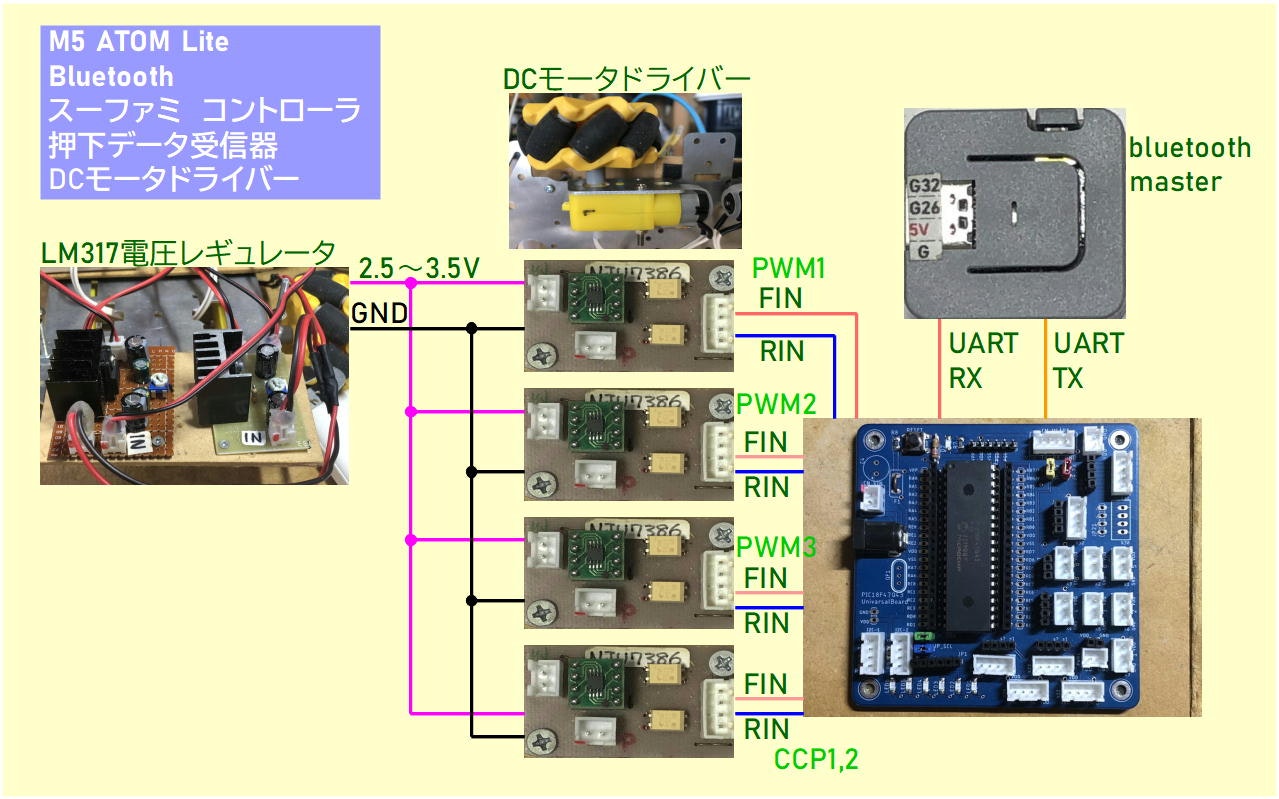
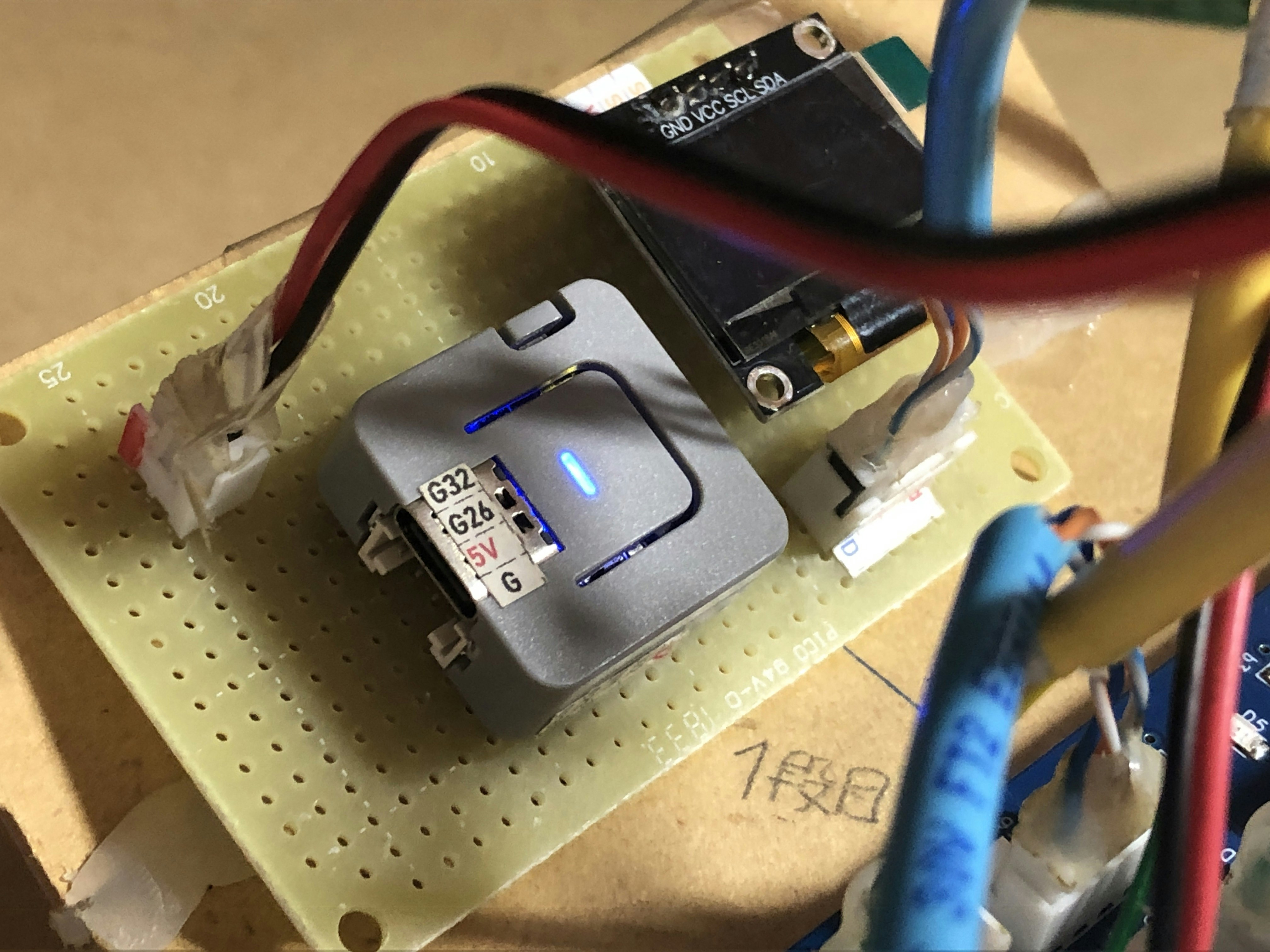
メカナムホイール車 M5Atom Lite bluetooth無線通信部 受信(Q43とシリアル通信で接続)
ポート割り振り
無線コントローラ M5Atom Liteとスーパーファミコンコントローラ送信機
コントローラの押下データを、メカナム車搭載のATOM Liteに送信します。
メカナム車側本体コード PIC18F47Q43
・PWM1,2,3,およびCCP1,2PWMモジュールのデューティーサイクルは15msで統一しています。
・スーファミコントローラ
L:減速 R:加速 十字キーで移動 A:CW回転 B:CCW回転
・ATOMLiteとUARTで接続し、コントローラから送られてくるデータを受信します。
main
// PIC18F27Q43 Configuration Bit Settings
// 'C' source line config statements
// CONFIG1
#pragma config FEXTOSC = OFF // External Oscillator Selection (Oscillator not enabled)
#pragma config RSTOSC = HFINTOSC_64MHZ// Reset Oscillator Selection (HFINTOSC with HFFRQ = 64 MHz and CDIV = 1:1)
// CONFIG2
#pragma config CLKOUTEN = OFF // Clock out Enable bit (CLKOUT function is disabled)
#pragma config PR1WAY = OFF // PRLOCKED One-Way Set Enable bit (PRLOCKED bit can be set and cleared repeatedly)
#pragma config CSWEN = ON // Clock Switch Enable bit (Writing to NOSC and NDIV is allowed)
#pragma config FCMEN = OFF // Fail-Safe Clock Monitor Enable bit (Fail-Safe Clock Monitor disabled)
// CONFIG3
#pragma config MCLRE = EXTMCLR // MCLR Enable bit (If LVP = 0, MCLR pin is MCLR; If LVP = 1, RE3 pin function is MCLR )
#pragma config PWRTS = PWRT_OFF // Power-up timer selection bits (PWRT is disabled)
#pragma config MVECEN = ON // Multi-vector enable bit (Multi-vector enabled, Vector table used for interrupts)
#pragma config IVT1WAY = ON // IVTLOCK bit One-way set enable bit (IVTLOCKED bit can be cleared and set only once)
#pragma config LPBOREN = OFF // Low Power BOR Enable bit (Low-Power BOR disabled)
#pragma config BOREN = SBORDIS // Brown-out Reset Enable bits (Brown-out Reset enabled , SBOREN bit is ignored)
// CONFIG4
#pragma config BORV = VBOR_1P9 // Brown-out Reset Voltage Selection bits (Brown-out Reset Voltage (VBOR) set to 1.9V)
#pragma config ZCD = OFF // ZCD Disable bit (ZCD module is disabled. ZCD can be enabled by setting the ZCDSEN bit of ZCDCON)
#pragma config PPS1WAY = OFF // PPSLOCK bit One-Way Set Enable bit (PPSLOCKED bit can be cleared and set only once; PPS registers remain locked after one clear/set cycle)
#pragma config STVREN = ON // Stack Full/Underflow Reset Enable bit (Stack full/underflow will cause Reset)
#pragma config LVP = ON // Low Voltage Programming Enable bit (Low voltage programming enabled. MCLR/VPP pin function is MCLR. MCLRE configuration bit is ignored)
#pragma config XINST = OFF // Extended Instruction Set Enable bit (Extended Instruction Set and Indexed Addressing Mode disabled)
// CONFIG5
#pragma config WDTCPS = WDTCPS_31// WDT Period selection bits (Divider ratio 1:65536; software control of WDTPS)
#pragma config WDTE = OFF // WDT operating mode (WDT Disabled; SWDTEN is ignored)
// CONFIG6
#pragma config WDTCWS = WDTCWS_7// WDT Window Select bits (window always open (100%); software control; keyed access not required)
#pragma config WDTCCS = SC // WDT input clock selector (Software Control)
// CONFIG7
#pragma config BBSIZE = BBSIZE_512// Boot Block Size selection bits (Boot Block size is 512 words)
#pragma config BBEN = OFF // Boot Block enable bit (Boot block disabled)
#pragma config SAFEN = OFF // Storage Area Flash enable bit (SAF disabled)
#pragma config DEBUG = OFF // Background Debugger (Background Debugger disabled)
// CONFIG8
#pragma config WRTB = OFF // Boot Block Write Protection bit (Boot Block not Write protected)
#pragma config WRTC = OFF // Configuration Register Write Protection bit (Configuration registers not Write protected)
#pragma config WRTD = OFF // Data EEPROM Write Protection bit (Data EEPROM not Write protected)
#pragma config WRTSAF = OFF // SAF Write protection bit (SAF not Write Protected)
#pragma config WRTAPP = OFF // Application Block write protection bit (Application Block not write protected)
// CONFIG10
#pragma config CP = OFF // PFM and Data EEPROM Code Protection bit (PFM and Data EEPROM code protection disabled)
// #pragma config statements should precede project file includes.
// Use project enums instead of #define for ON and OFF.
#include <xc.h>
#include <stdio.h>
#include <stdlib.h>
#include <stdint.h>
#include <stdbool.h>
#include "Q_peripheral27Q43.h"
#include "Q_interrupt27Q43.h"
#include "Q_initialize.h"
#include "Q_I2C1.h"
#include "I2C_LCD.h"
#include "stringFormat.h"
#include "MCP23017.h"
#include "I2C_LCD.h"
#include "I2C_LCD_BarMeter.h"
#include "RTC_DS3231.h"
#include "EEPROM_24LCxxx.h"
#include "Q_SPI2.h"
#include "MCP23Sxx.h"
#include "DFMRW.h"
#include "ds_ST7735S.h"
#include "ST7735_BarMeter.h"
#include "famicon.h"
void portInit(void);
void oscillatorInit(void);
void vicInit(void);
uint16_t strToInt16(uint8_t *ch, uint8_t _length);
void main(void)
{
uint8_t length,i;
int16_t val16;
uint16_t buttonState;
i=0;
val16=0;
//CPUハード初期化-----------------------
portInit();
oscillatorInit();
vicInit();
__delay_ms(100);
/* while(1)
{
LATCbits.LATC2=1;
LATCbits.LATC5=1;
__delay_ms(500);
LATCbits.LATC2=0;
LATCbits.LATC5=0;
__delay_ms(500);
}*/
//周辺機能初期化--------------------------------
timer0Init();//LED表示
timer1Init();//表示
//timer2Init();//ADC trigger
timer3Init();//CCP capture
timer4Init();//I2C timeOut
timer6Init();//CCP1 PWM
//timer6Init();
usartInit();
//adcInit();//Timer2も同時に初期化
pwm1Init();
pwm2Init();
pwm3Init();
CCP1_PWM_Init();
CCP2_PWM_Init();
//iocInit();//RC0:input
//I2C1_Init();//I2C初期化
//LCD_Init(LcdDeviceAdd);//LCD初期化(PCD8574駆動)
//Lcd_Mem_Char_Set(LcdDeviceAdd);//LCD CGRAMデータセット
//LCD_Printf(LcdDeviceAdd,"18F27Q43",8,0x80);
//LCD_Printf(LcdDeviceAdd,"PWM1 Slice1",11,0xC0);
//famicon controller
//famiconInit();
//#define debug
#ifdef debug
INTCON0bits.IPEN=1;//プライオリティ無し
INTCON0bits.GIE=1;//Enable all masked interrupts
while(1)
{
printf("%d\n",val16++);
__delay_ms(500);
if(rxUsart.completed)
{
rxUsart.completed=false;
printf("%s",rxUsart.buf);
rxUsart.length=0;
PIE4bits.U1RXIE=1;
}
};
#endif
//グローバル割り込み許可------------------------------------------
IPR3bits.TMR2IP=1;
INTCON0bits.IPEN=1;//プライオリティ無し
INTCON0bits.GIE=1;//Enable all masked interrupts
adcData.val[0]=0x0FFF;
while(1)
{
//Timer0割込み処理-------------------------------------
if(tm0.fg==true)
{
tm0.fg=false;
PORTCbits.RC0=~PORTCbits.RC0;
T0CON0bits.EN=1;
PIE3bits.TMR0IE=1;
}
//Timer1割込み------------------------------------------
if(tm1.fg==true)
{
tm1.fg=false;
T1CONbits.ON=1;
PIE3bits.TMR1IE=1;
}
//USART受信割り込み----------------------------------------
if(rxUsart.completed)
{
rxUsart.completed=false;
buttonState = (uint16_t)strtol(rxUsart.buf,NULL,16);
if(buttonState==0xFFF0)
{
PWM1S1P1L=0;
PWM1S1P2L=0;
//FR 後ろ
PWM2S1P1L=0;
PWM2S1P2L=0;
//RL 前
PWM3S1P1L=0;
PWM3S1P2L=0;
//RR 前
CCPR1=0;
CCPR2=0;
}
if((buttonState&0x0800)==0x0000)//UP
{
if((buttonState&0x0200)==0x0000)
{//左上
//FL 停止
PWM1S1P1L=0;
PWM1S1P2L=0;
//FR 前
PWM2S1P1L=adcData.val[0]>>4;
PWM2S1P2L=0;
//RL 前
PWM3S1P1L=adcData.val[0]>>4;
PWM3S1P2L=0;
//RR 停止
CCPR1=0;
CCPR2=0;
}
else
{
if((buttonState&0x0100)==0x0000)
{//右上
//FL 前
PWM1S1P1L=adcData.val[0]>>4;
PWM1S1P2L=0;
//FR 停止
PWM2S1P1L=0;
PWM2S1P2L=0;
//RL 停止
PWM3S1P1L=0;
PWM3S1P2L=0;
//RR 前
CCPR1=adcData.val[0]>>2;
CCPR2=0;
}else
{//前進
//FL 前
PWM1S1P1L=adcData.val[0]>>4;
PWM1S1P2L=0;
//FR 前
PWM2S1P1L=adcData.val[0]>>4;
PWM2S1P2L=0;
//RL 前
PWM3S1P1L=adcData.val[0]>>4;
PWM3S1P2L=0;
//RR 前
CCPR1=adcData.val[0]>>2;
CCPR2=0;
}
}
}
if((buttonState&0x0400)==0x0000)//DOWN
{
if((buttonState&0x0200)==0x0000)
{//左下
//FL 後ろ
PWM1S1P1L=0;
PWM1S1P2L=adcData.val[0]>>4;
//FR 停止
PWM2S1P1L=0;
PWM2S1P2L=0;
//RL 停止
PWM3S1P1L=0;
PWM3S1P2L=0;
//RR 後ろ
CCPR1=0;
CCPR2=adcData.val[0]>>2;
}else
{
if((buttonState&0x0100)==0x0000)
{//右下
//FL 停止
PWM1S1P1L=0;
PWM1S1P2L=0;
//FR 後ろ
PWM2S1P1L=0;
PWM2S1P2L=adcData.val[0]>>4;
//RL 後ろ
PWM3S1P1L=0;
PWM3S1P2L=adcData.val[0]>>4;
//RR 停止
CCPR1=0;
CCPR2=0;
}else
{//後進
//FL 後ろ
PWM1S1P1L=0;
PWM1S1P2L=adcData.val[0]>>4;
//FR 後ろ
PWM2S1P1L=0;
PWM2S1P2L=adcData.val[0]>>4;
//RL 後ろ
PWM3S1P1L=0;
PWM3S1P2L=adcData.val[0]>>4;
//RR 後ろ
CCPR1=0;
CCPR2=adcData.val[0]>>2;
}
}
}
if(((buttonState&0x0800)!=0x0000) && ((buttonState&0x0400)!=0x0000))
{
if((buttonState&0x0200)==0x0000)//LEFT
{//左すべり
//FL 後
PWM1S1P1L=0;
PWM1S1P2L=adcData.val[0]>>4;
//FR 前
PWM2S1P1L=adcData.val[0]>>4;
PWM2S1P2L=0;
//RL 前
PWM3S1P1L=adcData.val[0]>>4;
PWM3S1P2L=0;
//RR 後
CCPR1=0;
CCPR2=adcData.val[0]>>2;
}
if((buttonState&0x0100)==0x0000)//RIGHT
{//右すべり
//FL 前
PWM1S1P1L=adcData.val[0]>>4;
PWM1S1P2L=0;
//FR 後ろ
PWM2S1P1L=0;
PWM2S1P2L=adcData.val[0]>>4;
//RL 後ろ
PWM3S1P1L=0;
PWM3S1P2L=adcData.val[0]>>4;
//RR 前
CCPR1=adcData.val[0]>>2;
CCPR2=0;
}
if((buttonState&0x8000)==0x0000)
{//CW
//FL 前
PWM1S1P1L=adcData.val[0]>>4;
PWM1S1P2L=0;
//FR 後ろ
PWM2S1P1L=0;
PWM2S1P2L=adcData.val[0]>>4;
//RL 前
PWM3S1P1L=adcData.val[0]>>4;
PWM3S1P2L=0;
//RR 後ろ
CCPR1=0;
CCPR2=adcData.val[0]>>2;
}
if((buttonState&0x0080)==0x0000)
{//CCW
//FL 後
PWM1S1P1L=0;
PWM1S1P2L=adcData.val[0]>>4;
//FR 前
PWM2S1P1L=adcData.val[0]>>4;
PWM2S1P2L=0;
//RL 後
PWM3S1P1L=0;
PWM3S1P2L=adcData.val[0]>>4;
//RR 前
CCPR1=adcData.val[0]>>2;
CCPR2=0;
}
}
if((buttonState&0x0020)==0x0000)
{//減速
adcData.val[0]-=100;
if(adcData.val[0]<110)
adcData.val[0]=10;
}
if((buttonState&0x0010)==0x0000)
{//加速
adcData.val[0]+=100;
if(adcData.val[0]>0x0FFF)
adcData.val[0]=0x0FFF;
}
PWM1CONbits.LD=1;
PWM2CONbits.LD=1;
PWM3CONbits.LD=1;
while(PWM1CONbits.LD);
while(PWM2CONbits.LD);
while(PWM3CONbits.LD);
PIE1bits.ADIE=1;
//ADCON0bits.ON=1;
PIE3bits.TMR2IE=1;
T2CONbits.TMR2ON=1;
//Usart復帰
rxUsart.length=0;
PIE4bits.U1RXIE=1;
}
}
return;
}
void oscillatorInit(void)
{
//オシレータ設定----------------
OSCCON3bits.CSWHOLD=1;//Hold
OSCCON1bits.NDIV=1;//64Mhz/2=32Mhz;
while(!OSCCON3bits.NOSCR);
while(!PIR0bits.CSWIF);//ready state
PIR0bits.CSWIF=0;
OSCCON3bits.CSWHOLD=0;
while(!OSCCON3bits.ORDY);
}
void portInit(void)
{
//ポート設定----------------------
PORTA=0x00;
LATA=0x00;
ANSELA=0x00;
TRISA=0x00;
PORTB=0x00;
LATB=0x00;
ANSELB=0x00;
TRISB=0x00;
PORTC=0x00;
LATC=0x00;
ANSELC=0x00;
TRISC=0x00;
PORTD=0x00;
LATD=0x00;
ANSELD=0x00;
TRISD=0x00;
PORTE=0x00;
LATE=0x00;
ANSELE=0x00;
TRISE=0x00;
//PPS---------------------
PPSLOCK = 0x55;
PPSLOCK = 0xAA;
PPSLOCKbits.PPSLOCKED = 0;
//I2C1-------------------------
//RC4 for SDA
RC4PPS=0x38;
I2C1SDAPPS=0x14;
//RC3 for SCL
RC3PPS = 0x37;
I2C1SCLPPS=0x13;
PPSLOCK = 0x55;
PPSLOCK = 0xAA;
PPSLOCKbits.PPSLOCKED = 1;
ODCONCbits.ODCC3=1;
ODCONCbits.ODCC4=1;
RC3I2Cbits.TH=1;
RC4I2Cbits.TH=1;
}
void vicInit(void)
{
//割り込みテーブルaddress設定----------------------------------
INTCON0bits.GIE=0;//Enable all masked interrupts
IVTLOCK=0x55;
IVTLOCK=0xAA;
IVTLOCKbits.IVTLOCKED=0;
IVTBASE = 0x000008;
IVTLOCK=0x55;
IVTLOCK=0xAA;
IVTLOCKbits.IVTLOCKED=1;
}
uint16_t strToInt16(uint8_t *ch, uint8_t _length)
{
uint8_t i;
uint16_t ret;
ret = strtol(ch,NULL,16);
}
Q_Peripheral.c
#include "Q_peripheral27Q43.h"
//*****************************************************//
//USART初期化
//*****************************************************//
_rxUsart rxUsart;
void usartInit(void)
{
//6.PPS
PPSLOCK = 0x55;
PPSLOCK = 0xAA;
PPSLOCKbits.PPSLOCKED = 0;//Unlock.
U1RXPPS=0b010111;//RC7:rx
RC6PPS=0x20;//RC6:tx
TRISC|=0x80;
PPSLOCK = 0x55;
PPSLOCK = 0xAA;
PPSLOCKbits.PPSLOCKED = 1;//lock.
//1.ボーレート設定115200
U1BRG=SET_SPBRG_DATA1;
//2.モード 非同期
U1CON0bits.MODE=0b0000; //Asynchronous 8-bit USART mode
//4.Serial port enabled
U1CON1bits.ON=1;
//5.Transmit is enabled.
U1CON0bits.TXEN=1;
U1CON0bits.RXEN=1;
//7.interrupt
PIR4bits.U1RXIF=0;
PIE4bits.U1RXIE=1;
}
void putch(uint8_t _txData)
{
if(U1ERRIRbits.TXMTIF==High)//シフトレジスタ空?
{
do{
U1TXB=_txData;
while(U1ERRIRbits.TXMTIF==Low);
}while(U1FIFObits.TXBF);//TXバッファ空になるまで送信。
}else{
//error operation
}
}
uint8_t getch(void)
{
while(PIR4bits.U1RXIF==Low);//受信完了
return U1RXB;
}
uint8_t usartTxData[20];
void myUsartPrint(uint8_t *txBuf, uint8_t _length)
{
do{
putch(*txBuf++);
}while(--_length);
}
//*****************************************************//
//Timer0初期化
//*****************************************************//
_tm tm0;
void timer0Init(void)
{
//Timer0初期化--------------------------------------------------
T0CON1bits.CS=0b010;//クロックソースFosc/4
T0CON1bits.CKPS=0b0011;//プリスケ1:8
T0CON0bits.MD16=1;//16bitsタイマー
T0CON0bits.OUTPS=0b0000;//ポストスケーラ1:1
TMR0H=0xD8;//10ms Fosc=32Mhz
TMR0L=0xF0;//10ms
T0CON0bits.EN=1;
PIE3bits.TMR0IE=1;
PIR3bits.TMR0IF=0;
}
/*---------------------------------------------------
Timer1
---------------------------------------------------*/
_tm tm1;
void timer1Init(void)
{
T1CLK=1;//Fosc/4
T1CONbits.CKPS=0b11; //1:8
T1CONbits.RD16=1;//16bits.Timer
T1CLK=0b00001;//Fosc/4
TMR1H=0xD8;//Fosc=32 10ms
TMR1L=0xF0;
T1CONbits.ON=1;
PIR3bits.TMR1IF=0;
PIE3bits.TMR1IE=1;
}
/*---------------------------------------------------
Timer3
---------------------------------------------------*/
_tm tm3;
void timer3Init(void)
{
T3CONbits.CKPS=0b11; //1:8
T3CONbits.RD16=1;//16bits.Timer
T3CLK=0b00001;//Fosc/4
TMR3H=0x00;
TMR3L=0x00;
T3CONbits.ON=1;
PIR5bits.TMR3IF=0;
PIE5bits.TMR3IE=1;
}
/*---------------------------------------------------
Timer2
---------------------------------------------------*/
_tm tm2;
void timer2Init(void)
{
TMR2=0x00;
T2CONbits.T2CKPS=0b100;//prescle1:16
T2CONbits.OUTPS=0b0001;//postScaler 1:2
T2HLTbits.PSYNC=1;//synchoronized to Fosc/4
T2CLKCONbits.CS=0b00001;//Fosc/4
//PR2=0x1F;//Fosc=32Mhz 1ms 16,16
PR2=0x19;//32Mhz 0.1ms 16,2
tm2.cnt=0;
tm2.fg=false;
PIR3bits.TMR2IF=0;
PIE3bits.TMR2IE=1;
T2CONbits.TMR2ON=1;
}
/*---------------------------------------------------
Timer4
---------------------------------------------------*/
_tm tm4;
void timer4Init(void)
{
TMR4=0x00;
T4CONbits.OUTPS=0b1111;//postScaler 1:16
T4CONbits.T4CKPS=0b111;//prescle1:128
T4HLTbits.PSYNC=1;//synchoronized to Fosc/4
T4CLKCONbits.CS=0b00001;//Fosc/4
//PR4=0x1F;//Fosc=32Mhz 1ms
PR4=0x27;//Fosc=32Mhz 10ms
tm4.cnt=0;
tm4.fg=false;
PIR11bits.TMR4IF=0;
PIE11bits.TMR4IE=0;
T4CONbits.TMR4ON=0;
}
/*---------------------------------------------------
Timer6
---------------------------------------------------*/
_tm tm6;
void timer6Init(void)
{
TMR6=0x00;
T6CONbits.T6CKPS=0b101;//prescle1:32
T6CONbits.OUTPS=0b1111;//postScaler 1:16
T6HLTbits.PSYNC=1;//synchoronized to Fosc/4
T6CLKCONbits.CS=0b00001;//Fosc/4
//PR6=0xEA;//Fosc=32Mhz 5ms pre1:128,post1:16
//PR6=0x27;//Fosc=32Mhz 10ms pre1:128,post1:16
T6PR=0xEA; //Fosc=32Mhz 15ms pre1: 32,post1:16
tm6.cnt=0;
tm6.fg=false;
PIR15bits.TMR6IF=0;
PIE15bits.TMR6IE=0;
T6CONbits.TMR6ON=1;
}
//*****************************************************//
//ioc初期化
//*****************************************************//
_ioc ioc;
void iocInit(void)
{
IOCCNbits.IOCCN0=1;//RC0
TRISC|=0x01;//RC0
PIE0bits.IOCIE=1;
PIR0bits.IOCIF=0;
}
//******************************************************//
// * ADC初期化
// *****************************************************//
_adc adcData;
#define ADC_AverageMode
#ifdef ADC_BasicMode
void adcInit(void)
{
ADCON0bits.FM=1;//Right justified
ADCON0bits.CS=0;//Fosc
ADREFbits.NREF=0;//connected Vss
ADREFbits.PREF=0b00;//connected Vdd
ADACTbits.ACT=0b00100;//TMR2 postscaled.
ADPCH=2;//RA2 ANA2
adcData.ch[0]=2;
//port設定
TRISA|=0x04;//RA2:input
ANSELA|=0x04;//RA2:ANA4;
//割込み許可
PIR1bits.ADIF=0;
PIE1bits.ADIE=1;
ADCON0bits.ON=1;
//Trigger Timer begins
timer2Init();
}
#endif
#ifdef ADC_AverageMode
void adcInit(void)
{
ADCON0bits.FM=1;//Right justified
ADCON0bits.CS=0;//Fosc
ADCLK=15;
//Avarage MODE sample=16
ADCON2bits.MD=0b010;//Average Mode
ADCON2bits.CRS=3;//divied by 2^4=16;
ADRPT=8;
ADREFbits.NREF=0;//connected Vss
ADREFbits.PREF=0b00;//connected Vdd
ADACTbits.ACT=0b00100;//TMR2 postscaled.
//acquisition time Tacq=7us
ADACQ = 224; //Tosc=1/32Mhz = 1/32 us =0.03125us
ADPCH=0;
adcData.ch[0]=0;
//port設定
TRISA|=0x03;
ANSELA|=0x03;
//割込み許可
PIR1bits.ADIF=0;
PIE1bits.ADIE=1;
ADCON0bits.ON=1;
//Trigger Timer begins
timer2Init();
}
#endif
//******************************************************//
// * CCP1 PWM初期化
// *****************************************************//
void CCP1_PWM_Init(void)
{
CCP1CONbits.CCP1MODE=0b1100;//PWMmode
CCP1CONbits.CCP1FMT=0b0;
CCPR1=0x00;
CCPTMRS0bits.C1TSEL=0b11;//Timer6
//6.PPS
PPSLOCK = 0x55;
PPSLOCK = 0xAA;
PPSLOCKbits.PPSLOCKED = 0;//Unlock.
RB0PPS=0x15;//CCP1 output
PPSLOCK = 0x55;
PPSLOCK = 0xAA;
PPSLOCKbits.PPSLOCKED = 1;//lock.
CCP1CONbits.CCP1EN=1;
}
//******************************************************//
// * CCP2 PWM初期化
// *****************************************************//
void CCP2_PWM_Init(void)
{
CCP2CONbits.CCP2MODE=0b1100;//PWMmode
CCP2CONbits.CCP2FMT=0b0;
CCPR2=0x00;
CCPTMRS0bits.C2TSEL=0b11;//Timer6
//6.PPS
PPSLOCK = 0x55;
PPSLOCK = 0xAA;
PPSLOCKbits.PPSLOCKED = 0;//Unlock.
RB1PPS=0x16;//CCP2 output
PPSLOCK = 0x55;
PPSLOCK = 0xAA;
PPSLOCKbits.PPSLOCKED = 1;//lock.
CCP2CONbits.CCP2EN=1;
}
//******************************************************//
// * CCP1 キャプチャー初期化
// *****************************************************//
volatile _CCP1 CCP1;
void CCP1_CaptureInit(void)
{
CCP1CONbits.MODE=0b0101;//every rising edge
CCPTMRS0bits.C1TSEL=0b10;//Timer3
CCP1CAP=0x00;//Pin selected by CCP1PPS
//6.PPS
PPSLOCK = 0x55;
PPSLOCK = 0xAA;
PPSLOCKbits.PPSLOCKED = 0;//Unlock.
CCP1PPS=0b010010;//RC2
PPSLOCK = 0x55;
PPSLOCK = 0xAA;
PPSLOCKbits.PPSLOCKED = 1;//lock.
TRISC|=0x04;//RC2 input
//interrupt
PIR3bits.CCP1IF=0;
PIE3bits.CCP1IE=1;
CCP1CONbits.CCP1EN=1;
}
//******************************************************//
// * PWM1 初期化
// *****************************************************//
void pwm1Init(void)
{
PWM1CLK=0x05;//MFINTOSC 500khz
PWM1PR=0x00EA;//15ms
//PWM1PR=0x7EF;//100ms
//PWM1PR=0x02FFF;
PWM1CPRE=0x20;//prescaler
PWM1S1P1H=0x00;
PWM1S1P1L=0x00;
PWM1S1CFG=0x00;
//Clear PWM1_16BIT period interrupt flag
PIR4bits.PWM1PIF = 0;
//Clear PWM1_16BIT interrupt flag
PIR4bits.PWM1IF = 0;
//Clear PWM1_16BIT slice 1, output 1 interrupt flag
PWM1GIRbits.S1P1IF = 0;
//Clear PWM1_16BIT slice 1, output 2 interrupt flag
PWM1GIRbits.S1P2IF = 0;
//PWM1_16BIT interrupt enable bit
PIE4bits.PWM1IE = 0;
//PWM1_16BIT period interrupt enable bit
PIE4bits.PWM1PIE = 0;
//PPS
//6.PPS
PPSLOCK = 0x55;
PPSLOCK = 0xAA;
PPSLOCKbits.PPSLOCKED = 0;//Unlock.
RB2PPS=0x18;
RB3PPS=0x19;
PPSLOCK = 0x55;
PPSLOCK = 0xAA;
PPSLOCKbits.PPSLOCKED = 1;//lock.
PWM1CONbits.EN=1;
}
//******************************************************//
// * PWM2 初期化
// *****************************************************//
void pwm2Init(void)
{
PWM2CLK=0x05;//MFINTOSC 500khz
PWM2PR=0x00EA;//15ms
//PWM2PR=0x7EF;//100ms
//PWM2PR=0x02FFF;
PWM2CPRE=0x20;//prescaler
PWM2S1P1H=0x00;
PWM2S1P1L=0x00;
PWM2S1CFG=0x00;
//Clear PWM1_16BIT period interrupt flag
PIR5bits.PWM2PIF = 0;
//Clear PWM1_16BIT interrupt flag
PIR5bits.PWM2IF =0;
//Clear PWM1_16BIT slice 1, output 1 interrupt flag
PWM2GIRbits.S1P1IF=0;
//Clear PWM1_16BIT slice 1, output 2 interrupt flag
PWM2GIRbits.S1P2IF =0;
//PWM1_16BIT interrupt enable bit
PIE5bits.PWM2IE=0;
//PWM1_16BIT period interrupt enable bit
PIE5bits.PWM2PIE=0;
//PPS
//6.PPS
PPSLOCK = 0x55;
PPSLOCK = 0xAA;
PPSLOCKbits.PPSLOCKED = 0;//Unlock.
RB4PPS=0x1A;
RB5PPS=0x1B;
PPSLOCK = 0x55;
PPSLOCK = 0xAA;
PPSLOCKbits.PPSLOCKED = 1;//lock.
PWM2CONbits.EN=1;
}
//******************************************************//
// * PWM3 初期化
// *****************************************************//
void pwm3Init(void)
{
PWM3CLK=0x05;//MFINTOSC 500khz
PWM3PR=0x00EA;//15ms
//PWM3PR=0x7EF;//100ms
//PWM3PR=0x02FFF;
PWM3CPRE=0x20;//prescaler
PWM3S1P1H=0x00;
PWM3S1P1L=0x00;
PWM3S1CFG=0x00;
//Clear PWM1_16BIT period interrupt flag
PIR7bits.PWM3PIF = 0;
//Clear PWM1_16BIT interrupt flag
PIR7bits.PWM3IF =0;
//Clear PWM1_16BIT slice 1, output 1 interrupt flag
PWM3GIRbits.S1P1IF=0;
//Clear PWM1_16BIT slice 1, output 2 interrupt flag
PWM3GIRbits.S1P2IF =0;
//PWM1_16BIT interrupt enable bit
PIE7bits.PWM3IE=0;
//PWM1_16BIT period interrupt enable bit
PIE7bits.PWM3PIE=0;
//PPS
//6.PPS
PPSLOCK = 0x55;
PPSLOCK = 0xAA;
PPSLOCKbits.PPSLOCKED = 0;//Unlock.
//RC5PPS=0x1C;
//RC2PPS=0x1D;
RD0PPS=0x1C;
RD1PPS=0x1D;
PPSLOCK = 0x55;
PPSLOCK = 0xAA;
PPSLOCKbits.PPSLOCKED = 1;//lock.
PWM3CONbits.EN=1;
}
interrupt.c
#include "Q_interrupt27Q43.h"
//****************割り込み関数***********************//
// USART1割込み
//**************************************************//
void __interrupt(irq(IRQ_U1RX)) USART1RX_ISR(void)
{
uint8_t ch;
PIR4bits.U1RXIF=0;
ch=getch();
rxUsart.buf[rxUsart.length++]=ch;
if(rxUsart.length>RXUSART_BUFFER_SIZE)
{
rxUsart.length=0;
}
if(ch==0x0a)
{
rxUsart.buf[rxUsart.length-2]=0x00;
PIE4bits.U1RXIE=0;
rxUsart.completed=1;
}
}
//****************割り込み関数***********************//
// Timer0割込み
//**************************************************//
void __interrupt(irq(IRQ_TMR0)) Timer0_ISR(void)
{
PIR3bits.TMR0IF=0;
tm0.cnt++;
TMR0L=0xF0;//10ms
if(tm0.cnt==50)
{
tm0.cnt=0;
tm0.fg=true;
T0CON0bits.EN=0;
PIE3bits.TMR0IE=0;
}
}
//****************割り込み関数***********************//
// Timer1割込み
//**************************************************//
void __interrupt(irq(IRQ_TMR1)) Timer1_ISR(void)
{
PIR3bits.TMR1IF=0;
tm1.cnt++;
TMR1L=0xF0;
if(tm1.cnt==1)
{
tm1.cnt=0;
tm1.fg=true;
T1CONbits.ON=0;
PIE3bits.TMR1IE=0;
}
}
//****************割り込み関数***********************//
// Timer2割込み
//**************************************************//
void __interrupt(irq(IRQ_TMR2)) Timer2_ISR(void)
{
PIR3bits.TMR2IF=0;
PIE3bits.TMR2IE=0;
}
//****************割り込み関数***********************//
// Timer3割込み
//**************************************************//
void __interrupt(irq(IRQ_TMR3)) Timer3_ISR(void)
{
PIR5bits.TMR3IF=0;
CCP1.cnt[1]++;
if(CCP1.cnt[1]>10)
{
CCP1.cnt[0]=0x00;
CCP1.cnt[1]=0x00;
CCP1.index=0;
CCP1.val[0]=0x0000;
CCP1.val[1]=0x0000;
CCP1.flag=true;
CCP1.Tupflag=true;
}
}
//****************割り込み関数***********************//
// Timer4割込み
//**************************************************//
void __interrupt(irq(IRQ_TMR4)) Timer4_ISR(void)
{
PIR11bits.TMR4IF=0;
PORTBbits.RB2=~PORTBbits.RB2;
// PIE11bits.TMR4IE=1;
// T4CONbits.TMR4ON=1;
}
//****************割り込み関数***********************//
// Timer6割込み
//**************************************************//
void __interrupt(irq(IRQ_TMR6)) Timer6_ISR(void)
{
PIR15bits.TMR6IF=0;
PORTBbits.RB2=~PORTBbits.RB2;
// PIE11bits.TMR4IE=1;
// T4CONbits.TMR4ON=1;
}
//****************割り込み関数***********************//
// IOC割込み
//**************************************************//
void __interrupt(irq(IRQ_IOC)) IOC_ISR(void)
{
uint8_t val;
PIR0bits.IOCIF=0;
val=IOCCF;
if(IOCCNbits.IOCCN0==1 && val==0x01)
{
ioc.fg=true;
PIE0bits.IOCIE=0;
}
//zero clear--------------
val=0xFF;
val=val^IOCCF;
IOCCF&=val;
}
//****************割り込み関数***********************//
// ADC割込み
//**************************************************//
void __interrupt(irq(IRQ_AD)) ADC_ISR(void)
{
PIR1bits.ADIF=0;
//adcData.val[0]=(uint16_t)((ADRESH << 8) + ADRESL);
if(ADCNT==ADRPT)
{
if(ADPCH==0)
{
adcData.val[0]=ADFLTR;
ADPCH=1;
}else
{
if(ADPCH==1)
{
adcData.val[1]=ADFLTR;
ADFLTR=0x0000;
ADPCH=0;
PIE3bits.TMR2IE=0;
T2CONbits.TMR2ON=0;
PIE1bits.ADIE=0;
//ADCON0bits.ON=0;
adcData.completed=true;
}
}
}
}
//****************割り込み関数***********************//
// CCP1キャプチャー割込み
//**************************************************//
void __interrupt(irq(IRQ_CCP1)) CCP1_ISR(void)
{
PIR3bits.CCP1IF=0;
CCP1.val[CCP1.index]=((uint16_t)CCPR1H)<<8;
CCP1.val[CCP1.index++]|=CCPR1L;
if(CCP1.index==2)
{
CCP1.flag=true;
CCP1.index=0;
CCP1CONbits.CCP1EN=0;
PIE3bits.CCP1IE=0;
T3CONbits.ON=0;
PIE5bits.TMR3IE=0;
TMR3H=0x00;
TMR3L=0x00;
}
}