ros2-for-unity とは?
3D アプリを簡単に作れる Unity で、サクッと ROS2 通信できるようになります。
とても便利!

Unity で ROS2 と通信する仕組みは主に下記3つがありますが、
| パッケージ | 通信ベース | |
|---|---|---|
| Unity-Robotics-Hub (Unity 公式) | TCP 通信 | Unity-Robotics-Hub |
| ros2-for-unity | DDS ネイティブ | ros2-for-unity |
| ros-sharp | json 文字列 | ros-sharp |
今回の ros2-for-unity は、
・速い (DDS ネイティブ、インストールはディレクトリコピーで、利用コードは簡単に使い始められる)
・安い (Apache-2.0、オープンで無償で使えるという意味で)
・うまい(Win, Linux, あとフォークでAndroidも。)
の3点でオススメと言えます!
しかも
「オープンソースでのリリースは TIER IVとの協力により実現しました(chrome 翻訳)」
などと書かれており、ワクワクしますねw
※参考:片岡さんの記事
ということで
サクッと使ってみましょう。
最初の一歩は
① ダウンロード
② そのフォルダをそのまま Unity プロジェクトの Asset ディレクトリにコピー
③ Empty Object に「ROS2UnityComponent.cs」「ROS2TalkerExample.cs」をアタッチ
コピーしてアタッチ。これだけで自作アプリが Topic を publish するようになります。
簡単すぎィ!
可視化に使うも良し、コントローラアプリにするも良し。
点群出すコードを書いたり、スマホから使ったり。
ChatGPT にコード出させたり、たくさんの入門書のコードを参考にしたり。
自分は rviz より Unity の方がとっつきやすく、便利に使っています♪
環境
ROS2 Humble
① Win 11 (Unity 2022.3.20f1)
② Ubuntu 22.04 (ROS2 Humble)
今回は2つの端末の構成で試しました。
(Unity 2020~、Win10/11、Ubuntu 20.04/22.04 対応とのこと)
手順
一応手順のスクショ残しておきます。
① ros2-for-unity の「ビルド済」 zip を、 Release 一覧からダウンロード。
(Android で使いたい方はこちらを参考に。)
今回は「 Ros2ForUnity_humble_standalone_windows11.zip 」を使いました。

② Unity の Asset ディレクトリ内に先ほどダウンロードした zip の中身を解凍してコピーします。
(show in Explorer でエクスプローラでディレクトリを開けます)
(README には unitypackage を作ると書いてありますが、これで動きました。)
③ Unity エディタ上で、Create Empty で空のオブジェクトを作り、そこに「Scripts」内の「ROS2UnityComponent.cs」「ROS2TalkerExample.cs」をアタッチすれば、トピックのパブリッシュが行われるアプリがサクッと完成です。




ROS2TalkerExample.cs の中身
とても短いコードです。
// Copyright 2019-2021 Robotec.ai.
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
using UnityEngine;
namespace ROS2
{
/// <summary>
/// An example class provided for testing of basic ROS2 communication
/// </summary>
public class ROS2TalkerExample : MonoBehaviour
{
// Start is called before the first frame update
private ROS2UnityComponent ros2Unity;
private ROS2Node ros2Node;
private IPublisher<std_msgs.msg.String> chatter_pub;
private int i;
void Start()
{
ros2Unity = GetComponent<ROS2UnityComponent>();
}
void Update()
{
if (ros2Unity.Ok())
{
if (ros2Node == null)
{
ros2Node = ros2Unity.CreateNode("ROS2UnityTalkerNode");
chatter_pub = ros2Node.CreatePublisher<std_msgs.msg.String>("chatter");
}
i++;
std_msgs.msg.String msg = new std_msgs.msg.String();
msg.Data = "Unity ROS2 sending: hello " + i;
chatter_pub.Publish(msg);
}
}
}
} // namespace ROS2
使用例
Unity の画面上の Play ボタン(三角)を押して実行すれば、
ros2 topic list
ros2 topic echo /chatter
でトピックを受信する様子が見れます。



なお、リスナーの方のコードは「ROS2ListenerExample.cs」です。
// Copyright 2019-2021 Robotec.ai.
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
using System;
using UnityEngine;
namespace ROS2
{
/// <summary>
/// An example class provided for testing of basic ROS2 communication
/// </summary>
public class ROS2ListenerExample : MonoBehaviour
{
private ROS2UnityComponent ros2Unity;
private ROS2Node ros2Node;
private ISubscription<std_msgs.msg.String> chatter_sub;
void Start()
{
ros2Unity = GetComponent<ROS2UnityComponent>();
}
void Update()
{
if (ros2Node == null && ros2Unity.Ok())
{
ros2Node = ros2Unity.CreateNode("ROS2UnityListenerNode");
chatter_sub = ros2Node.CreateSubscription<std_msgs.msg.String>(
"chatter", msg => Debug.Log("Unity listener heard: [" + msg.Data + "]"));
}
}
}
} // namespace ROS2
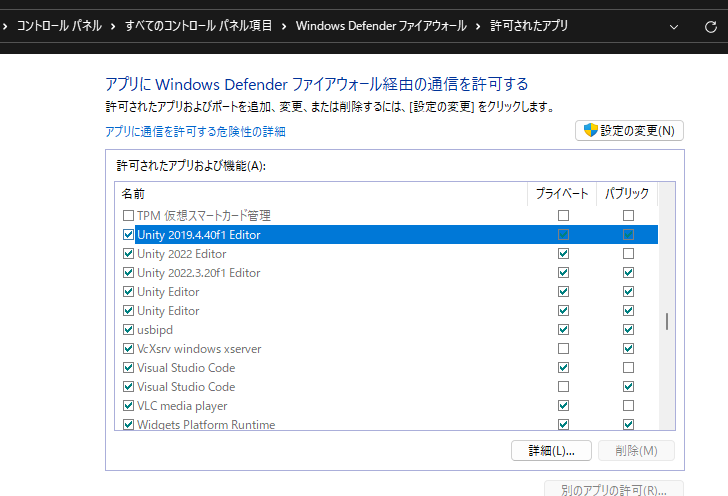
引っかかったところ
・Windows ファイアウォールで Unity 通信が遮断されていると、他PCからそのトピックだけ見えなくなったりします。



・ROS_DOMAIN_ID を各端末で揃えないと、ROS2 通信が端末同士で共有されません。
(特に設定してなければ大丈夫と思いますが)
Unity コード上からなら
using System;
Environment.SetEnvironmentVariable("ROS_DOMAIN_ID", "0");
Windows PowerShell だと環境変数の設定方法は、
$Env:ROS_DOMAIN_ID = 0
echo $Env:ROS_DOMAIN_ID
Ubuntu は、
export ROS_DOMAIN_ID=0
echo $ROS_DOMAIN_ID
参考
これは ros2-for-unity ではなく、Unity 公式の Unity-Robotics-Hub 利用例ですが、
やはり Unity が使えると 豊富な 3D 関連の関数やアセットが使えるので便利ですね…!
URDF Importer は別途個別に使えます。
xacro ファイルは xacro コマンドで一度 URDF にするそうです。
参考:
謝辞
ROS2 コミュニティ界隈の方々、いつもたくさん記事を参考にさせて頂いてます。
この場でみなさんに感謝お伝え申し上げます!
devemin