クランク角センサ信号を入力し、回転数を確認する
クランク角センサの疑似信号を用いて、Speeduinoでエンジン回転を認識するか確認します。
用意するもの
- Arduino Mega
- Arduino Uno、または、互換ボード
SpeeduinoのI/Oポート確認
util.inoに定義されています。
デフォルトのI/Oポートは、以下のように設定されています。
- pin 19:クランク角センサ
- pin 18:カムセンサ(2ndクランク角センサ)
utils.ino
case 3:
//Pin mappings as per the v0.4 shield
pinInjector1 = 8; //Output pin injector 1 is on
pinInjector2 = 9; //Output pin injector 2 is on
pinInjector3 = 10; //Output pin injector 3 is on
pinInjector4 = 11; //Output pin injector 4 is on
pinInjector5 = 12; //Output pin injector 5 is on
pinInjector6 = 50; //CAUTION: Uses the same as Coil 4 below.
pinCoil1 = 40; //Pin for coil 1
pinCoil2 = 38; //Pin for coil 2
pinCoil3 = 52; //Pin for coil 3
pinCoil4 = 50; //Pin for coil 4
pinCoil5 = 34; //Pin for coil 5 PLACEHOLDER value for now
pinTrigger = 19; //The CAS pin
pinTrigger2 = 18; //The Cam Sensor pin
pinTPS = A2;//TPS input pin
pinMAP = A3; //MAP sensor pin
pinIAT = A0; //IAT sensor pin
pinCLT = A1; //CLS sensor pin
pinO2 = A8; //O2 Sensor pin
pinBat = A4; //Battery reference voltage pin
pinDisplayReset = 48; // OLED reset pin
pinTachOut = 49; //Tacho output pin (Goes to ULN2803)
pinIdle1 = 5; //Single wire idle control
pinIdle2 = 6; //2 wire idle control
pinBoost = 7; //Boost control
pinVVT_1 = 4; //Default VVT output
pinFuelPump = 45; //Fuel pump output (Goes to ULN2803)
pinStepperDir = 16; //Direction pin for DRV8825 driver
pinStepperStep = 17; //Step pin for DRV8825 driver
pinStepperEnable = 24; //Enable pin for DRV8825
pinFan = 47; //Pin for the fan output (Goes to ULN2803)
pinLaunch = 51; //Can be overwritten below
pinFlex = 2; // Flex sensor (Must be external interrupt enabled)
pinResetControl = 43; //Reset control output
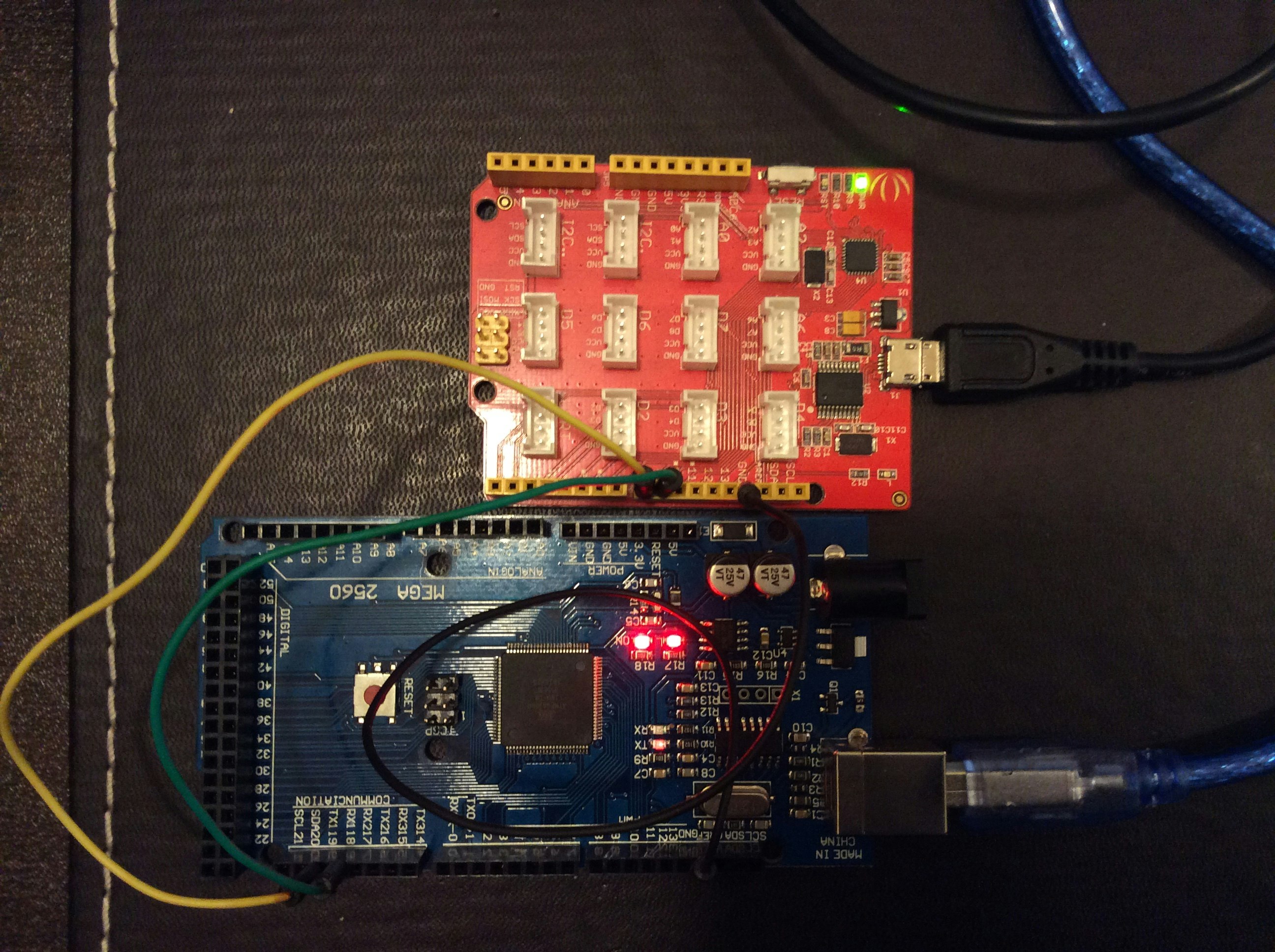
結線
Arduino Mega(Speeduino)とArduino(Ardu-Stim)を以下のように結線します。
| Speeduino | Ardu-Stim |
|---|---|
| 19:Crank | 8:Crank |
| 18:Cam | 9:Cam |
| GND | GND |
Arduino Mega(Speeduino)とArduino(Ardu-Stim)をPCに接続
TunerStudio
- TunerStudioを起動し、前回作成したProjectを開く
- Arduino Mega(Speeduino)のシリアルポートを設定し、通信を接続
- File>Load Tuneより、reference/Base Tunes/Speeduino base tune.msqを開き、デフォルト設定データを書き込む
Device Druid
- Device Druidを起動
- Arduino (Ardu-Stim)のシリアルポートを設定し、通信を接続
- Wheel Options>Choose wheelsで25を入力
- Topメニューに戻り、Set Fixed RPMで回転数を入力(例えば1500)
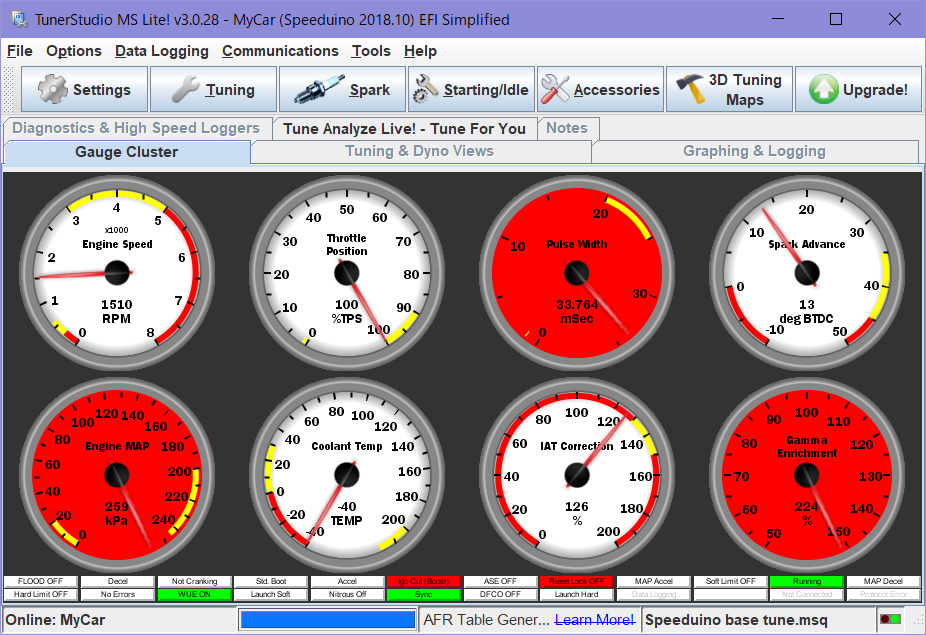
TunerStudioでの確認
設定した回転数がメーターに表示されます。
回転数をスイープさせてみます。![]()
- Device DruidのSet Swept RPMで500,3000,1000を入力
- TunerStudioのTuning>Real-Time Displayを開く
回転数の変化をプロッターで確認できます。
500<->3000 RPM(1000rpm/sec)
最後に
クランク角センサの信号を入力し、Speeduinoで回転数の確認ができました。![]()
次回は、インジェクターとイグニッションの出力信号を確認します。