構成はタイトルのまんまです。
正しいやり方かどうかは分かりませんが、動かすことが出来たのでメモしておきます。2021/12/26現在の情報です。
Sora Laboの設定
ユーザー登録をして、シグナリングURLとシグナリングキーを確認しておく。(このあと使う)
送信側 momoの起動
momoを起動しWebカメラの映像を送出する。
momoを実行するPCにはWebカメラが接続されていることが前提。
Momoの起動オプション
./momo sora --signaling-url wss://node-01.sora-labo.shiguredo.jp/signaling --channel-id USERNAME@CHANNEL-ID --metadata '{"signaling_key": "xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx"}' --role sendonly
ここで、--signaling-url や --metadata '{"signaling_key": "xxxxxxxxxxxxxxxxxxxxxx"}'のxxxxxxxxxxxxxxxxxxxxxxの部分はSora Laboのページに表示された値を使う。
channel-idはSora Laboに登録したGitHubのユーザー名と@と任意の文字列の組み合わせ。
例えばcomoc@sora-test-channel。
受信側 Unityの設定とプレイ
SoraSample.csスクリプトの修正
2021/12/26時点のGitHubのmasterブランチのSoraSample.csスクリプトでは、DataChannelMessagingと記述すべき部分が DataChannel になっているので、DataChannelMessagingに置換する。またconfig.DataChannelsもconfig.DataChannelMessagingに置換する。
recvonlyシーンを開く
Sora Unity SDK Samplesプロジェクトを開き、recvonlyシーンを読み込む。
Scriptの設定
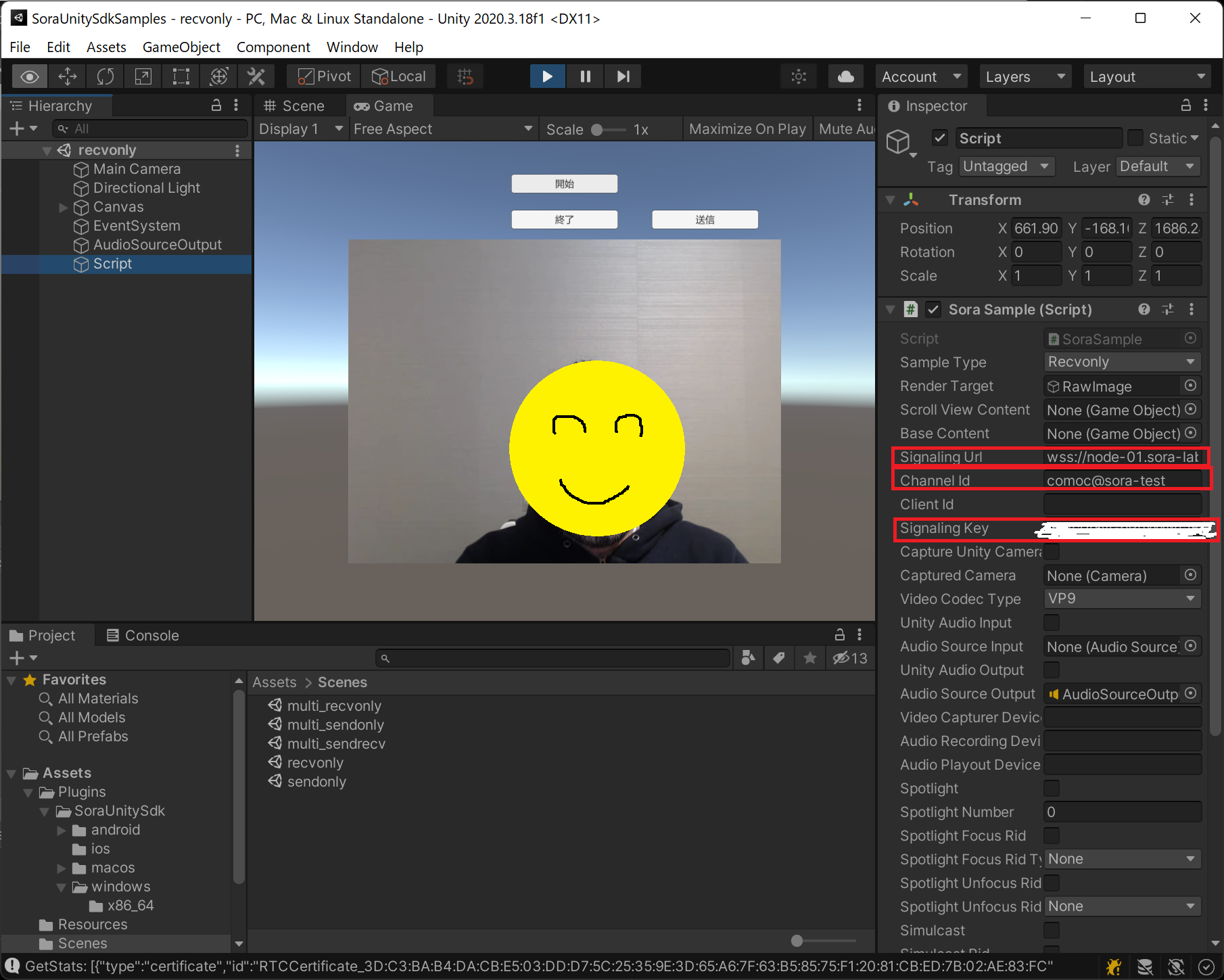
HierarchyからScriptを選択し、InspectorからSignaling Url、Channel Id、Signaling Keyの3か所に、momoで指定したものと同じ値を入力する。
実行
エディタのPlayボタンを押した後、「開始」ボタンを押す。
うまく行けば、このスクショのように、送出側のカメラ映像が表示される。
Linuxで ffmpeg で任意の映像ソースを仮想ビデオデバイス /dev/videoN にして momo から送出
手元にビデオデバイスがない(動画ファイルならある)ときに使える技。
ffmpegを使って再生
例. VIDEOFILE.mp4を /dev/video2 のソースにする。
ffmpeg -re -stream_loop -1 -i VIDEOFILE.mp4 -map 0:v -f v4l2 /dev/video2
オプションの意味
-
-reはフレームレートを維持 -
-stream_loop -1は無限ループ -
-map 0:vはビデオだけ抽出 -
-f v4l2v4l2のフォーマットを強制
momo で /dev/videoN をビデオデバイスとする。解像度は4Kにしてみる
momo --video-device="/dev/video2" --resolution 4K sora --signaling-url wss://node-01.sora-labo.shiguredo.jp/signaling --channel-id USERNAME@CHANNEL-ID --metadata '{"signaling_key": "xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx"}' --role sendonly
-video-device="/dev/video2" ビデオデバイスを指定。(このオプションを指定する順番をいろいろ試してみたところmomoの直後ならば動くようだ)
--resolution 4K 解像度を4Kにする。
Unity側のRawImageに設定されているテクスチャの解像度が640x480に固定されていたので、SoraSample.csを改造して3840,2160にしないとぬるい画になってしまう。
以上。