いろいろ注意
- (めんどくさく、なってきたので)なんとなく、動いたので、これで良しとする。
- 過去ログを見よ!!!
- いろいろ、したいが軽くなる方向で進める
- uno3のトーン関数を見るとハードウェアカウンターを上手に使っている(その辺から、解析を進めないと
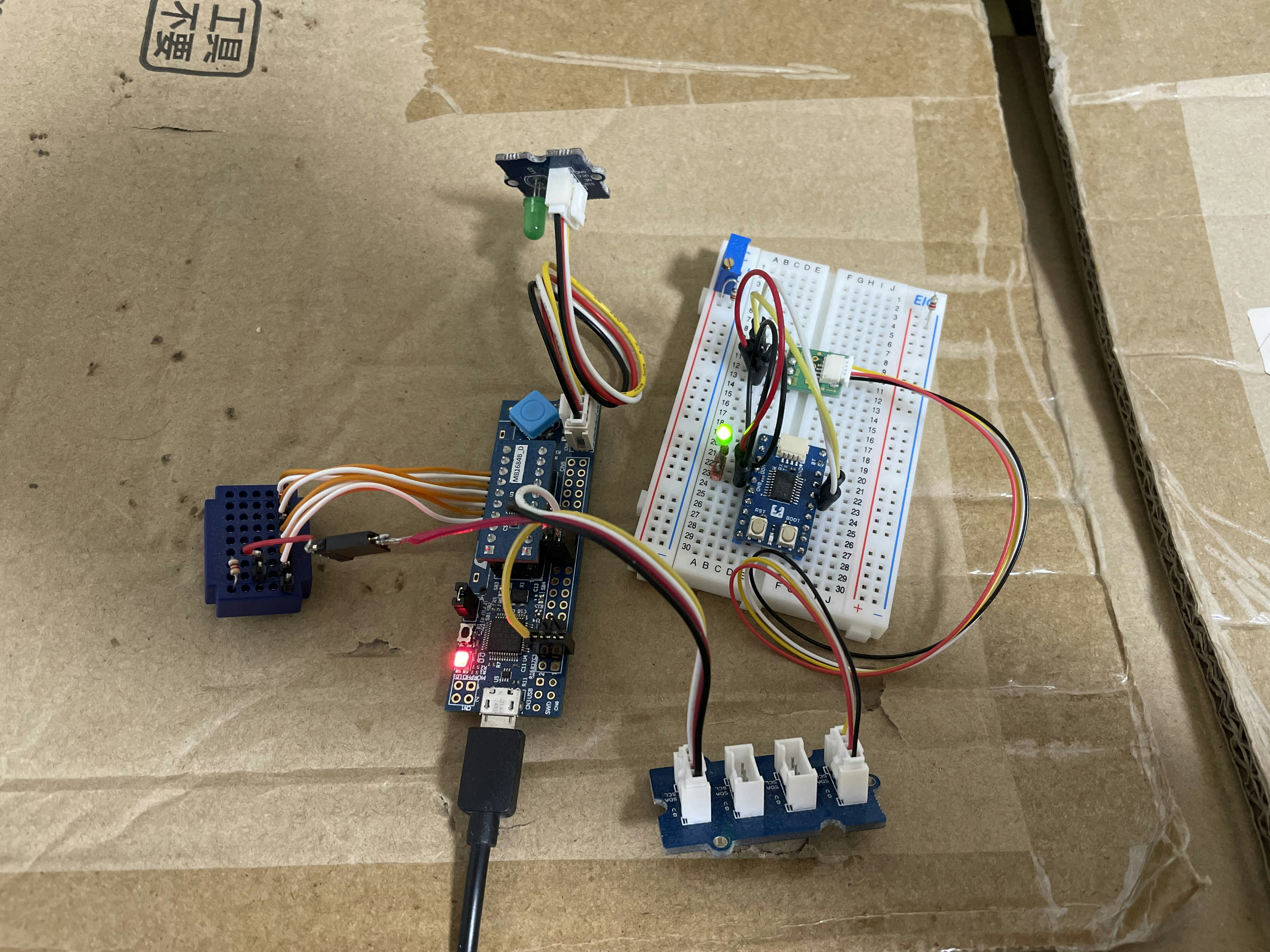
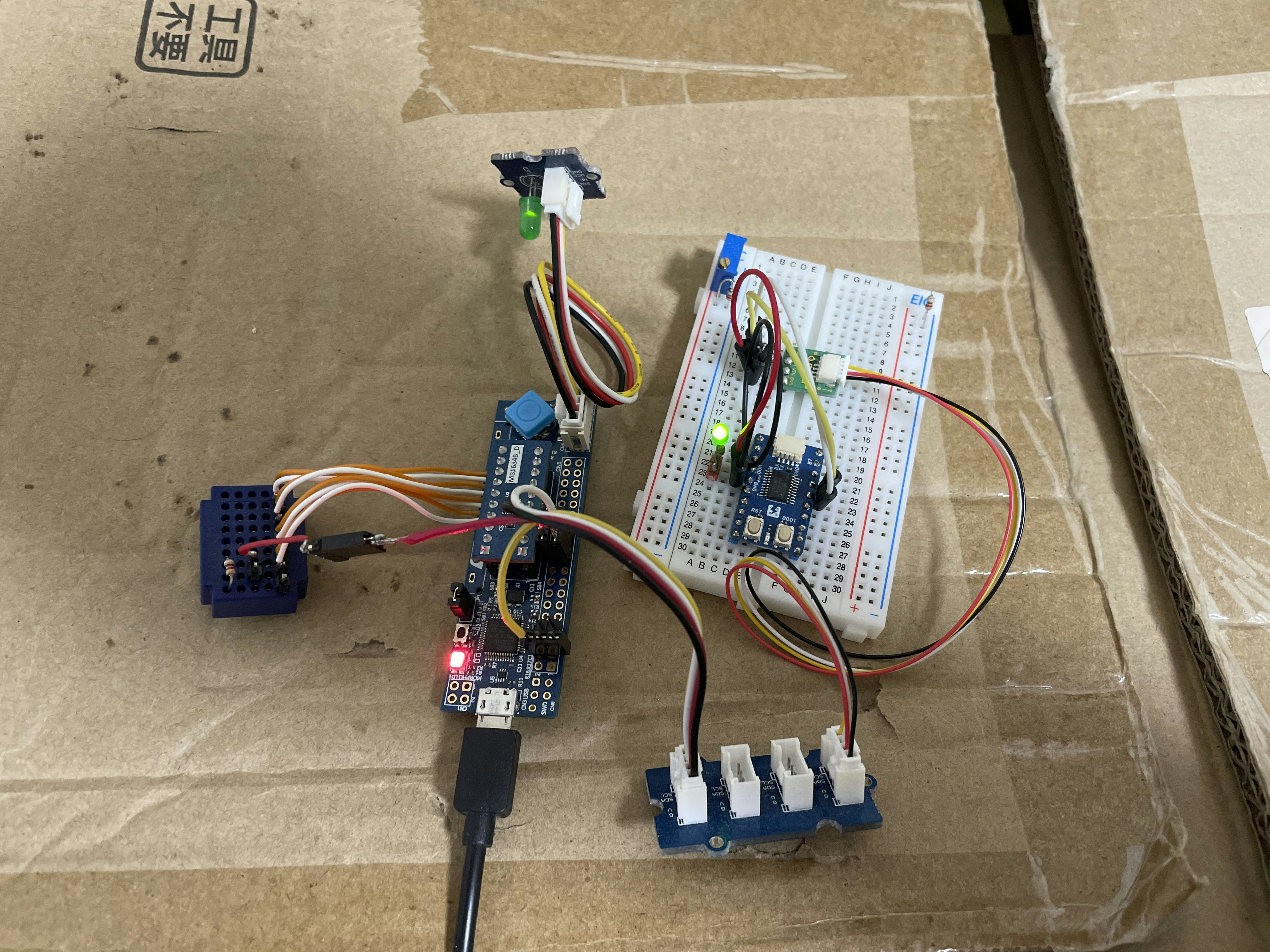
結果
プログラム
- STM32C0116-DK
//I2C_BEEP_C011_4
//インクルド
#include <Arduino.h>
#include <Wire.h> // I2C
//定義
volatile unsigned char buf[32+1] = {
0,0,0,0,0,0,0,0,
0,0,0,0,0,0,0,0,
0,0,0,0,0,0,0,0,
0,0,0,0,0,0,0,0,
0};
struct {
int frequency;
int count_dw;
} B;
int bk_frequency;
#define DD 3 // potentiometer connected to analog pin x
//初期化
void setup() {
//シリアルポートの初期化
Serial.begin(9600);
Serial.println("START"); //debug
pinMode(DD, OUTPUT); // sets the LED pin as output
analogWriteFrequency(5); //周波数
analogWriteResolution(16); //分解能
//analogWrite(DD, 30000 );
//delay(5000); //1秒待つ
//I2Cの初期化
Wire.begin( 0x1e ); // I2Cスレーブアドレスの設定
Wire.onReceive(receiveEvent); // データが来ると呼ばれる関数
//カウントダウンタイマーを0にする
B.count_dw = 0;
//B.count_dw = 5; //debug
//周波数のバックアップを0にする
bk_frequency = 0;
//周波数を0にする
B.frequency = 0;
//周波数を0に変える
Serial.println("CHANGE!!! frequency");
Serial.println(B.frequency);
//analogWriteFrequency(0); //周波数
analogWrite(DD, 0 );
//while (1) {} //debug
} //setup
//メインループ
void loop() {
//↓カウントダウン開始
Serial.println();
Serial.println("START!!! count down");
while (B.count_dw > 0) {
//B.frequency = 440; //debug
//周波数が変わったらの処理
if ( B.frequency != bk_frequency ) {
//周波数のバックアップ
bk_frequency = B.frequency;
//周波数を変える
Serial.println("CHANGE!!! frequency");
Serial.println(B.frequency);
analogWriteFrequency(B.frequency); //周波数
analogWrite(DD, 30000 );
} //endif
//sleep(1); //1秒待つ debug
delay(1); //1ms秒待つ
B.count_dw = B.count_dw - 1;
//printf("%d\n",count_dw);
//Serial.print("#");
} //while
//delay(1000); //debug
//Serial.println(); //debug
Serial.println("END!!! count down"); //debug
//↑カウントダウン終了
//周波数のバックアップ
bk_frequency = 0;
B.frequency = 0;
//音を止める
//周波数を0に変える
Serial.println("CHANGE!!! frequency");
Serial.println(B.frequency);
//analogWriteFrequency(0); //周波数
analogWrite(DD, 0 );
//終了後の無限ループ
Serial.println("endless loop!!!"); //dgbug
while(B.count_dw <= 0){
//Serial.print("@");
delay(1); //1秒待つ
}//while
} //loop
//レシーブイベント(受信)
void receiveEvent(int howMany) {
int i = 0; //カウンター
while (0 < Wire.available() && (i < 32) ) { // loop through all but the last
// I2C受信データの読み込み
buf[i++] = Wire.read(); // receive byte as a character
} //while
//バッファをコピーする
memcpy( (char *)(&B), (char *)(&buf), 8 );
//関数が呼ばれるとりあえずメッセージをだす
//Serial.print("[=]"); //debug
} //receiveEvent
- HOST STM32G030F6
//i2c_beep_g030_1
//Arduino Modulino Buzzer(STM32C011)のミニドライバー
//32BITのARM系限定
//理由 なぜなら、int が32BITで86系と同じ小っちゃい順からだから
//インクルド
#include <Arduino.h>
#include <Wire.h>
#include <string.h> //memcpy用
//定義
int frequency = 440; //周波数
int duration = 1000; //鳴らす時間
//Arduino Modulino Buzzer(STM32C011)のブザーを鳴らす
//鳴らす時間,周波数
void i2c_beep(int freq, int len_ms) {
//鳴らす時間,周波数をバッファーに転記する 受信側も同じ32BIT,ARM系だから成り立つ
uint8_t buf[8];
memcpy(&buf[0], &freq, 4);
memcpy(&buf[4], &len_ms, 4);
//I2Cへの送信
Wire.beginTransmission( 0x1e ); //スタートとI2Cアドレスを送る
for (int i = 0; i < 8; i++) { //8回ループ
//一文字出力
Wire.write( buf[i] ); //1バイトデータを送る
}//for i
Wire.endTransmission(); //ストップを送る
} //i2c_beep
//初期化
void setup() {
//STM32G030F6
//I2Cのポートの変更
Wire.setSDA(10); //PA10
Wire.setSCL(9); //PA9
//I2Cの初期化処理
Wire.begin(); //STM32G030F6
delay(200); //ダミーのウエート I2Cスレーブの安定化用
} //setup
//メインループ
void loop() {
// Play tone at specified frequency and duration
i2c_beep(frequency, duration); //ブザーを鳴らす
delay(1000); //1秒待つ
// Stop the tone (0 frequency) //ブザーを止める
i2c_beep(0, duration);
delay(1000); ////1秒待つ
} //loop
、
、
、
おまけ
プログラム(テスト中)
//I2C_BEEP_C011_3
//インクルド
#include <Arduino.h>
#include <Wire.h> // I2C
//定義
volatile unsigned char buf[32+1] = {
0,0,0,0,0,0,0,0,
0,0,0,0,0,0,0,0,
0,0,0,0,0,0,0,0,
0,0,0,0,0,0,0,0,
0};
struct {
long frequency;
long count_dw;
} B;
int bk_frequency;
//初期化
void setup() {
//シリアルポートの初期化
Serial.begin(9600);
Serial.println("START"); //debug
//I2Cの初期化
Wire.begin( 0x1e ); // I2Cスレーブアドレスの設定
Wire.onReceive(receiveEvent); // データが来ると呼ばれる関数
//カウントダウンタイマーを0にする
B.count_dw = 0;
//周波数のバックアップを0にする
bk_frequency = 0;
//周波数を0にする
B.frequency = 0;
//周波数を0に変える
//sddddsdsd
Serial.println("CHANGE!!! frequency");
Serial.println(B.frequency);
//while (1) {} //debug
} //setup
//メインループ
void loop() {
//↓カウントダウン開始
Serial.println();
Serial.println("START!!! count down");
while (B.count_dw > 0) {
//B.frequency = 6; //debug
//周波数が変わったらの処理
if ( B.frequency != bk_frequency ) {
//周波数のバックアップ
bk_frequency = B.frequency;
//周波数を変える
//sddddsdsd change
Serial.println("CHANGE!!! frequency");
Serial.println(B.frequency);
} //endif
//sleep(1); //1秒待つ debug
delay(200); //1秒待つ
B.count_dw = B.count_dw - 1;
//printf("%d\n",count_dw);
Serial.print("#");
} //while
//↑カウントダウン終了
Serial.println(); //debug
//周波数のバックアップ
bk_frequency = 0;
B.frequency = 0;
//音を止める
//周波数を0に変える
//sddddsdsd
Serial.println("CHANGE!!! frequency");
Serial.println(B.frequency);
//終了後の無限ループ
Serial.println("endless loop!!!"); //dgbug
while(B.count_dw <= 0){
//Serial.print("@");
delay(1); //1秒待つ
}//while
} //loop
//レシーブイベント(受信)
void receiveEvent(int howMany) {
int i = 0; //カウンター
while (0 < Wire.available() && (i < 32) ) { // loop through all but the last
// I2C受信データの読み込み
buf[i++] = Wire.read(); // receive byte as a character
} //while
//バッファをコピーする
memcpy( &B, &buf, ( sizeof(buf) < sizeof(B) ) ? sizeof(buf) : sizeof(B) );
//関数が呼ばれるとりあえずメッセージをだす
//Serial.print("[=]"); //debug
} //receiveEvent
TART
CHANGE!!! frequency
0
START!!! count down
CHANGE!!! frequency
0
endless loop!!!
START!!! count down
#####
CHANGE!!! frequency
0
endless loop!!!
START!!! count down
CHANGE!!! frequency
6
#####
CHANGE!!! frequency
0
endless loop!!!
START!!! count down
#####
CHANGE!!! frequency
0
endless loop!!!
START!!! count down
CHANGE!!! frequency
6
#####
CHANGE!!! frequency
0
endless loop!!!