はじめに
DonkeyCar 3.0 is Released!でいろいろと新しくなったらしいのでそろそろやってみようと思いました。ラジコン等を買うお金を貯めるまでとりあえずシミュレーターで学習などの予行演習をやっておきます
レポジトリを漁っているうちにシミュレーターで強化学習するのが簡単になってるっぽかったのでやってみることにしました
環境をセットアップする
macOS Mojave 10.14.5
pyenvで専用の環境をつくります
pyenv virtualenv 3.7.3 donkeycar
pyenv activate donkeycar
python -V
Python 3.7.3
後で重複するものもあるが以下のモジュールをインストールしておきます
pip install python-socketio flask eventlet pygame numpy pillow h5py scikit-image opencv-python gym
[donkeycar](git clone https://github.com/wroscoe/donkey donkeycar)のレポジトリをクローンします
git clone https://github.com/wroscoe/donkey donkeycar
必要なモジュールをインストールします
pip install -e donkeycar
self-driving sandboxのレポジトリをクローンします
git clone https://github.com/tawnkramer/sdsandbox.git
必要なモジュールをインストールします
pip install -r sdsandbox/requirements.txt
次にdonkey_gymをクローンします
git clone https://github.com/tawnkramer/donkey_gym
必要なモジュールをインストールします
pip install -e donkey_gym
Releaseページから現行最新版のシミュレーターバイナリDonkeySimMac_10_13.zipをダウンロードして展開しdonkey_simを /Applications に配置します
シミュレーターを起動して強化学習する
reinforcement_learningのディレクトリに移動します
cd donkey_gym/examples/reinforcement_learning/
シミュレーターのパスを指定してddqn.pyを実行します。Deep Reinforcement Learning with Double Q-learningの実装のようです
python ddqn.py --sim=/Applications/donkey_sim.app/Contents/MacOS/donkey_sim
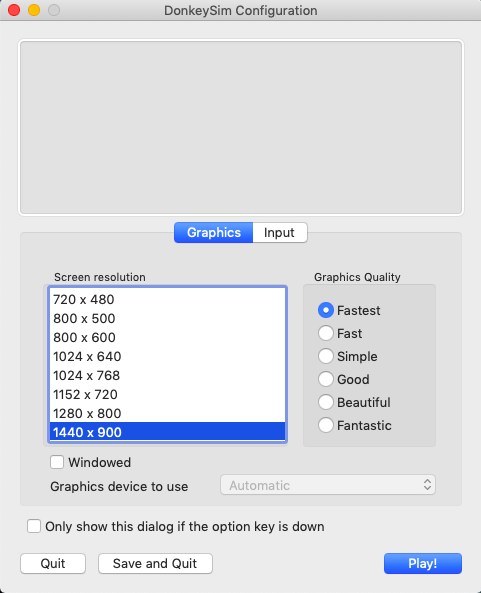
実行すると以下のようになってシミュレーターの起動画面が表示されます
/Users/user/.pyenv/versions/donkeycar/lib/python3.7/site-packages/skimage/viewer/__init__.py:6: UserWarning: Viewer requires Qt
warn('Viewer requires Qt')
WARNING: Logging before flag parsing goes to stderr.
W0706 22:06:32.471105 4405204416 deprecation_wrapper.py:119] From ddqn.py:26: The name tf.keras.initializers.normal is deprecated. Please use tf.compat.v1.keras.initializers.normal instead.
W0706 22:06:32.475600 4405204416 deprecation_wrapper.py:119] From ddqn.py:218: The name tf.ConfigProto is deprecated. Please use tf.compat.v1.ConfigProto instead.
W0706 22:06:32.475827 4405204416 deprecation_wrapper.py:119] From ddqn.py:220: The name tf.Session is deprecated. Please use tf.compat.v1.Session instead.
W0706 22:06:32.508859 4405204416 deprecation_wrapper.py:119] From ddqn.py:221: The name tf.keras.backend.set_session is deprecated. Please use tf.compat.v1.keras.backend.set_session instead.
starting DonkeyGym env
donkey subprocess started
binding to ('0.0.0.0', 9091)
waiting for sim to start..
2019-07-06 22:06:33.317 donkey_sim[38189:2539567] Could not find image named 'ScreenSelector'.
waiting for sim to start..
waiting for sim to start..
waiting for sim to start..
画面下の Play! ボタンをクリックします
シミュレーターが起動し自動的にコースが選択されて学習がはじまります。動画のように何度も運転が繰り返されます
ログをみると学習が繰り返されているのがわかります
got a new client ('127.0.0.1', 59824)
W0706 22:07:47.631042 4405204416 deprecation.py:506] From /Users/user/.pyenv/versions/donkeycar/lib/python3.7/site-packages/tensorflow/python/ops/init_ops.py:1251: calling VarianceScaling.__init__ (from tensorflow.python.ops.init_ops) with dtype is deprecated and will be removed in a future version.
Instructions for updating:
Call initializer instance with the dtype argument instead of passing it to the constructor
Episode: 0
EPISODE 0 TIMESTEP 30 / ACTION [-0.08891889, 0.3] / REWARD 0.9979240885446676 / EPISODE LENGTH 30 / Q_MAX 0
fps 14.380368140227569
EPISODE 0 TIMESTEP 60 / ACTION [-0.31381074, 0.3] / REWARD 1.22906461238042 / EPISODE LENGTH 60 / Q_MAX 0
EPISODE 0 TIMESTEP 90 / ACTION [-0.46118185, 0.3] / REWARD 1.283182117658 / EPISODE LENGTH 90 / Q_MAX 0
fps 19.979947188928957
episode: 0 memory length: 107 epsilon: 0.9895139999999955 episode length: 107
Episode: 1
episode: 1 memory length: 108 epsilon: 0.9894159999999954 episode length: 1
Episode: 2
episode: 2 memory length: 116 epsilon: 0.9886319999999951 episode length: 8
Episode: 3
episode: 3 memory length: 117 epsilon: 0.988533999999995 episode length: 1
Episode: 4
EPISODE 4 TIMESTEP 120 / ACTION [0.5056638, 0.3] / REWARD 0.6079470236506799 / EPISODE LENGTH 3 / Q_MAX 6.9752893
episode: 4 memory length: 126 epsilon: 0.9876519999999946 episode length: 9
Episode: 5
episode: 5 memory length: 131 epsilon: 0.9871619999999944 episode length: 5
Episode: 6
episode: 6 memory length: 142 epsilon: 0.986083999999994 episode length: 11
Episode: 7
episode: 7 memory length: 149 epsilon: 0.9853979999999937 episode length: 7
Episode: 8
EPISODE 8 TIMESTEP 150 / ACTION [-0.971151, 0.3] / REWARD 0.90009812538202 / EPISODE LENGTH 1 / Q_MAX 13.961587
episode: 8 memory length: 155 epsilon: 0.9848099999999934 episode length: 6
ディレクトリに学習済みモデルrl_driver.h5が生成されています
ls -1
README.md
ddqn.py
ppo_train.py
rl_driver.h5
unitylog.txt
おわりに
シミュレーターで簡単に強化学習できました。しばらく学習させてみて、ちゃんと走るようになるかみてみようと思います