はじめに
こんにちは、しがない高校生をしているbasalte(ばさると)と申します。
今回はRoboCup@Home Educationに出場した機体のハードウェアについての解説です。
こちらに活動の全体をまとめた記事もありますのでもし良ければご覧ください。
この完成機がどのような構造になっているのかを説明していきます。

土台
足回りのルンバとその上を支えている筐体はこのようになっています。

MDFという硬い木の板と塩ビパイプで制作していて、とても軽く、とても安価です。
・ルンバ中古 1万円
・RPLiDAR A1M8 1万円
・塩ビ、MDF 3000円
という構成です。これなら5台ぐらい作れますね。
こちらのようにルンバをと塩ビパイプを接続するための3Dプリンターパーツを印刷し、取り外し可能となっています。

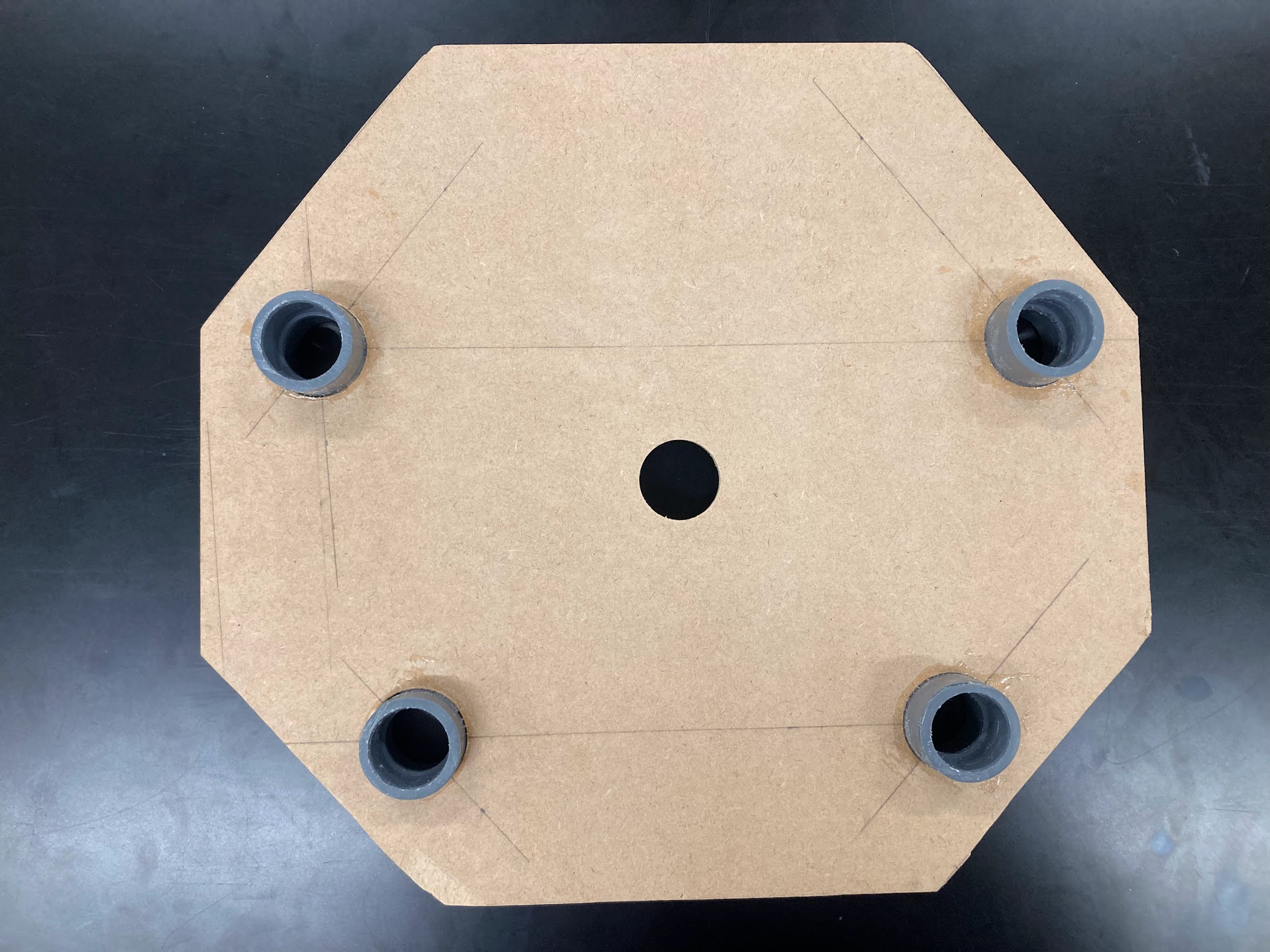
また2段目はこちらのようになっており、2DLiDARと中央のカメラのための塩ビパイプの基盤があります。
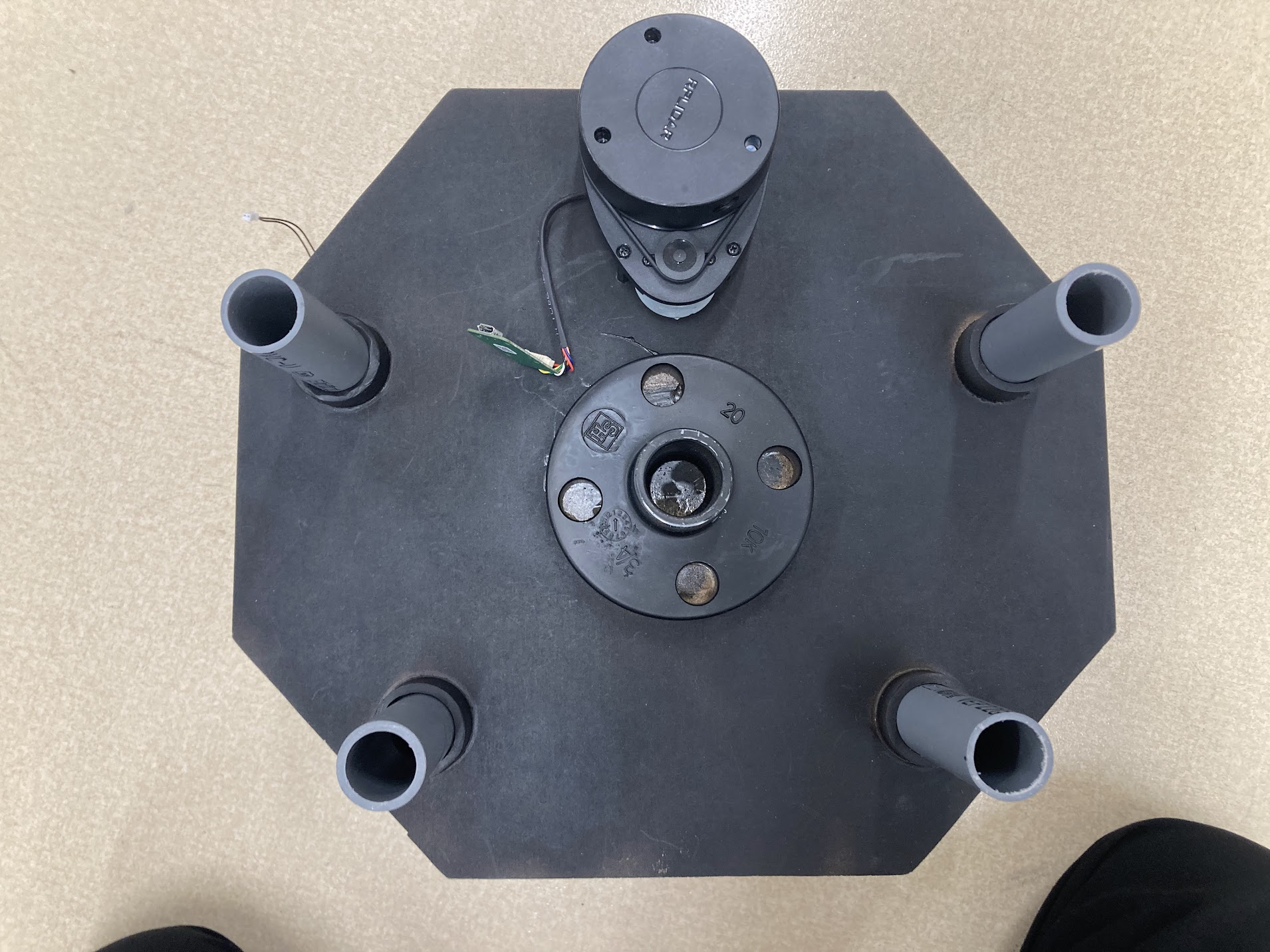
ちなみに色を付ける前はこのようになっていて、規定の位置にドリルで穴をあけ、接着剤でガチガチに留めます。これの前の機体は設計図が無く、私が手で合わせて穴を開けていたことを考えると恐ろしいですね。
Openmanipulator-x
@Shiba_ro8さんの協力でOpenmanipulator-Xの改造を行い、RealSenseが接続でき、把持できる物体の大きさが2倍ほどになりました。
こちらでオープンソースとして公開されています。
おじさんが設計した、だいたい3Dプリンターで作れる深層学習研究用マニピュレーターのOnShapeリンクって、前にツイートしてたっけ?https://t.co/5svbJCIKwI pic.twitter.com/0D1wvY837u
— Yoshihiro Shibata (@shiba_8ro) February 26, 2024
頭部
ROBOTISの直交2軸サーボを使い、上下左右にカメラを動かすことができます。今のところ、人を追従する際にしか使えていないので、今後の開発で活躍してくれることと思います。

改善できる点
配線
非常停止用の回路は今度公開する記事をご覧ください。
ただ配線を考慮した設計の機構になっていないので、テープで強引に止めている部分が多いです。
ロボットアームのための配線やシリアルが雑な形で配線されているのはあまり良くないことなので、早急に治したいです。(シリアルは外れたらロボットの動作が止まってしまうので)
アームの昇降
今後OPLなどの上位リーグに出場する場合、アームの可動域が足りないため、軸数を増やしたり昇降機構をつける必要があります。
ロボットアームの重量が上がると台車の荷重を上げたり機構を見直す必要があるため、簡単ではないですが、今後挑戦したいと考えています。