はじめに
Raspberry Piに取り付けたLiDARのデータをRvizで見ようとしたけど動作が重い。そのため別PCでトピックをサブスクライブして見れるようにしようとした際の仮想環境(UTM)のネットワーク設定メモ。
使用環境
Raspberry Pi
- Raspberry Pi 4 Model B / 4GB
- Ubuntu Server 20.04.4 LTS
- ROS2 Foxy
M1 Mac(別PC)
-
MacBook Air (M1, 2020), macOS Monterey
-
Ubuntu Desktop 20.04.4 LTS(64-bit ARMv8/AArch64)
-
ROS2 Foxy
UTMのネットワーク設定を変更してブリッジ接続する
UTMはデフォルトの設定ではネットワーク設定がブリッジになっておらず、Raspberry Piが別PC上の仮想マシンと通信できないため、以下の通りネットワークの設定を変える。
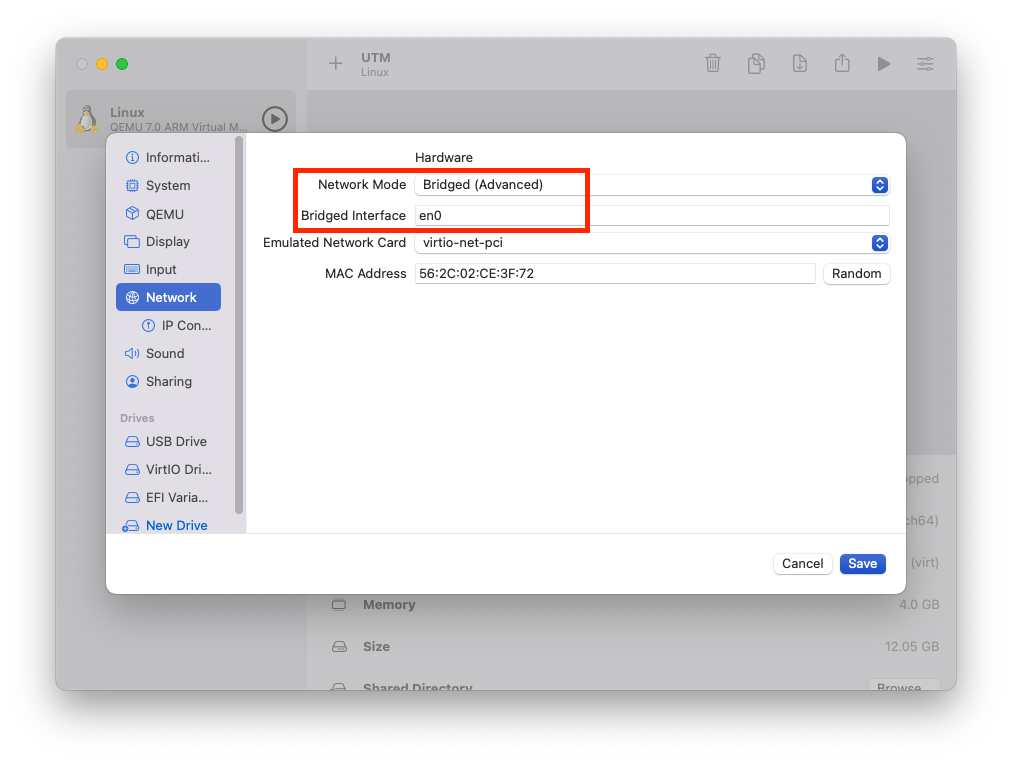
これで別PC上仮想マシンとRaspberry Piが同じセグメントのネットワークに存在するようになり、Raspberry PiのROS2ノードが送信するメッセージを別PC上の仮想マシンがサブスクライブできるようになる。