CUDA-PCL評価用にVLP-16を動かしたときのメモ。
事前作業
VLP-16 Nodeの構築
Docker内でVLP-16用のNodeをBuildしておきます。
cd ~/data/ros2_ws/src/
git clone -b ros2 https://github.com/ros-drivers/velodyne
cd ~/data/ros2_ws/
colcon build --base-paths src/velodyne
source install/setup.bash
Jetson側の設定
Docker内ではなく、大本のUbuntu上で、ここからは作業します。先に必要なパッケージをインストールしておきます。
sudo apt-get install arp-scan
Jetsonのeth0のIPアドレスを10.0.0.2に固定します。
sudo vi /etc/network/interfaces.d/network
# The loopback network interface
auto lo
iface lo inet loopback
# The primary network interface
auto eth0
# DHCP
# iface eth0 inet dhcp
# Static IP
iface eth0 inet static
address 10.0.0.2
netmask 255.255.255.0
# dns-nameservers 8.8.8.8
ネットワークの再起動をおこないます。
sudo /etc/init.d/networking restart
IPアドレスが割り振られたことの確認
ifconfig -a
...
eth0: flags=4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 1500
inet 10.0.0.2 netmask 255.255.255.0 broadcast 10.0.0.255
inet6 fe80::204:4bff:fecb:e19a prefixlen 64 scopeid 0x20<link>
ether 00:04:4b:cb:e1:9a txqueuelen 1000 (Ethernet)
RX packets 54497 bytes 61371918 (61.3 MB)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 131 bytes 45724 (45.7 KB)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
device interrupt 41
...
VLP-16の設定
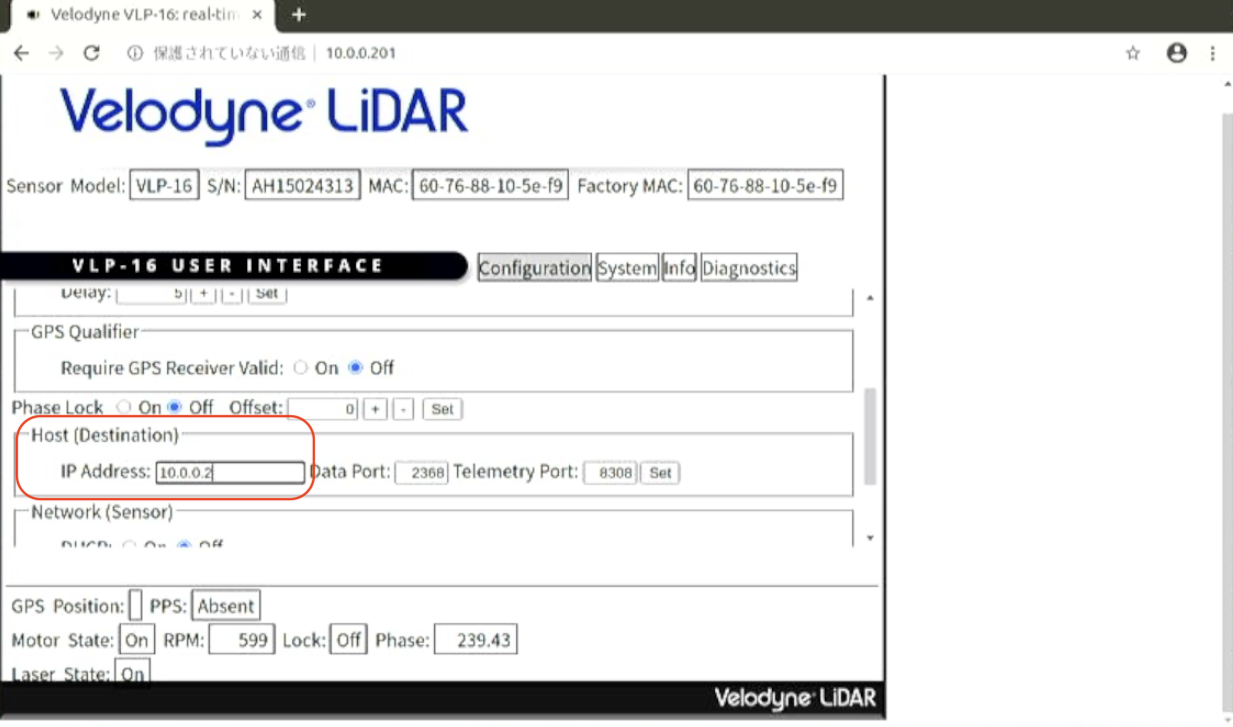
VLP-16とJetson AGX XavierをダイレクトにEthernetケーブルで接続します。Jetson AGX Xavier側でブラウザを起動し、10.0.0.201に接続します。初期設定では、マルチキャストでデータ送信が行われるため、Jetson AGX XavierのIPアドレスに限定してデータ送信するように変更します。
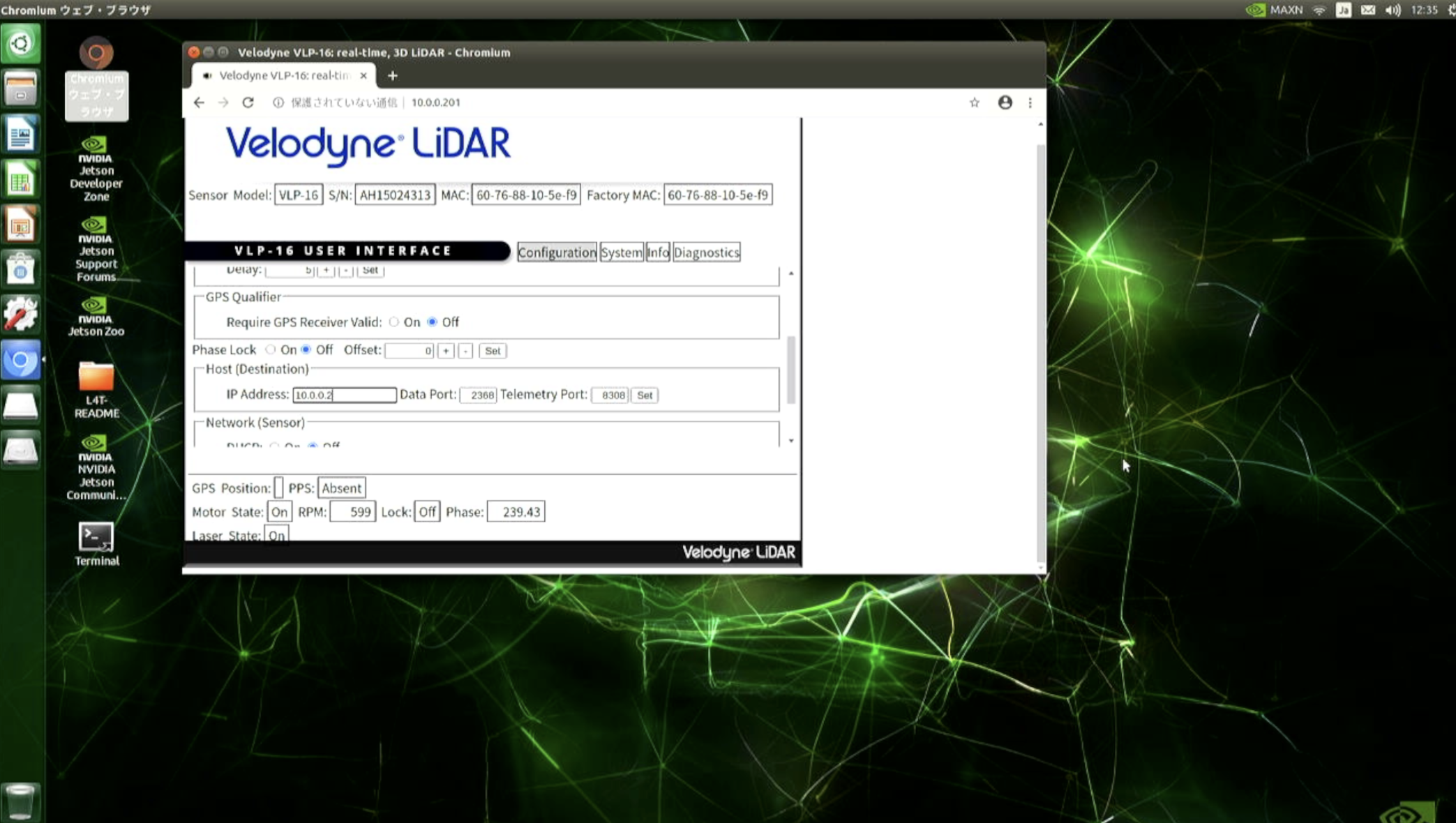
| 項目 | 値 |
|---|---|
| Host(Destination) IP Address | 10.0.0.2 |
VLP-16がネットワーク内に存在していることの確認をおこないます。
sudo arp-scan -l
Interface: eth0, datalink type: EN10MB (Ethernet)
Starting arp-scan 1.9 with 256 hosts (http://www.nta-monitor.com/tools/arp-scan/)
10.0.0.201 60:76:88:10:5e:f9 Velodyne
3 packets received by filter, 0 packets dropped by kernel
Ending arp-scan 1.9: 256 hosts scanned in 3.386 seconds (75.61 hosts/sec). 1 responded
ROS Nodeの起動
再びDockerにログインし、ROS Nodeを起動します。
ros2 run velodyne_driver velodyne_driver_node
ros2 launch velodyne_pointcloud velodyne_convert_node-VLP16-launch.py
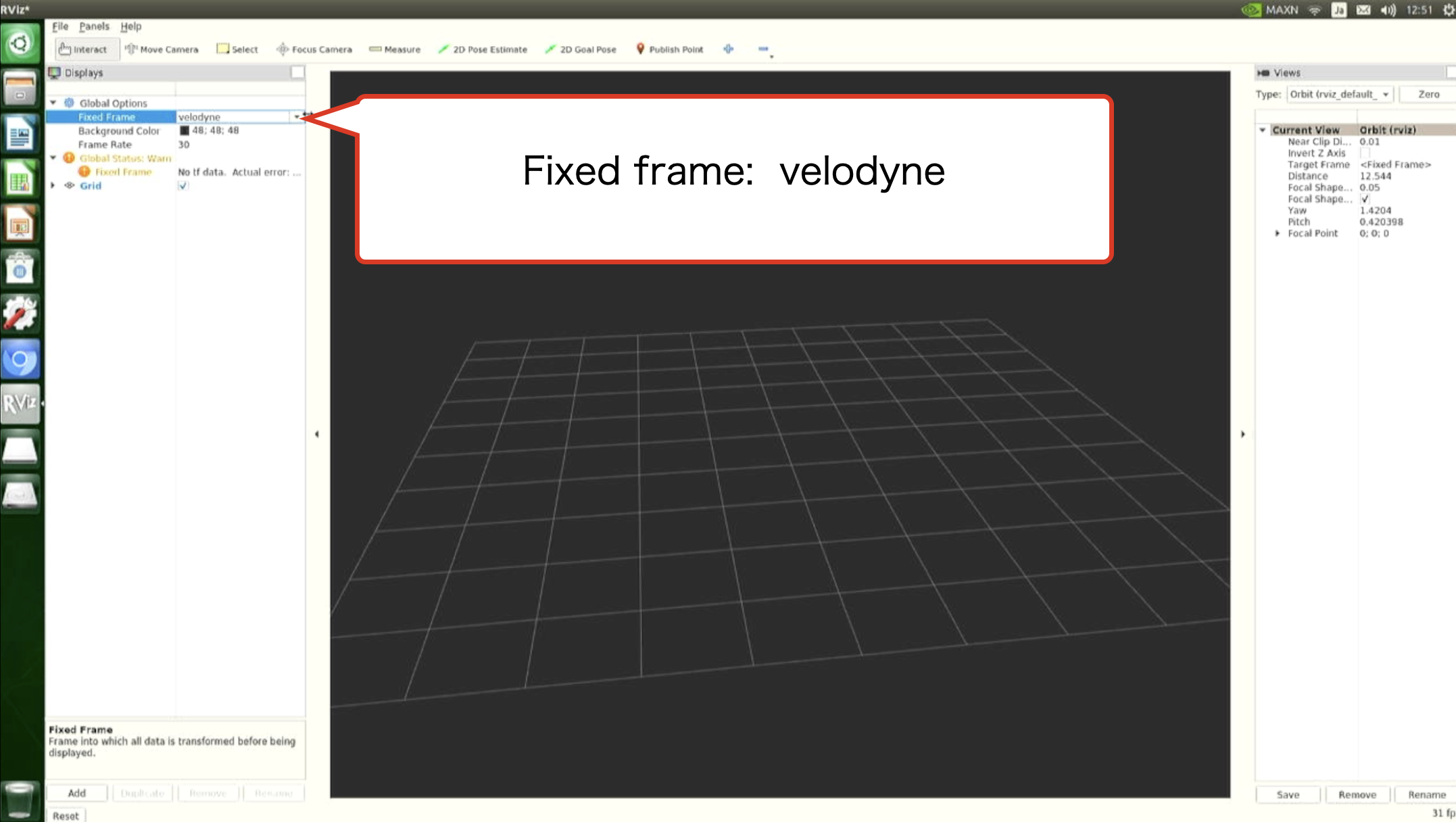
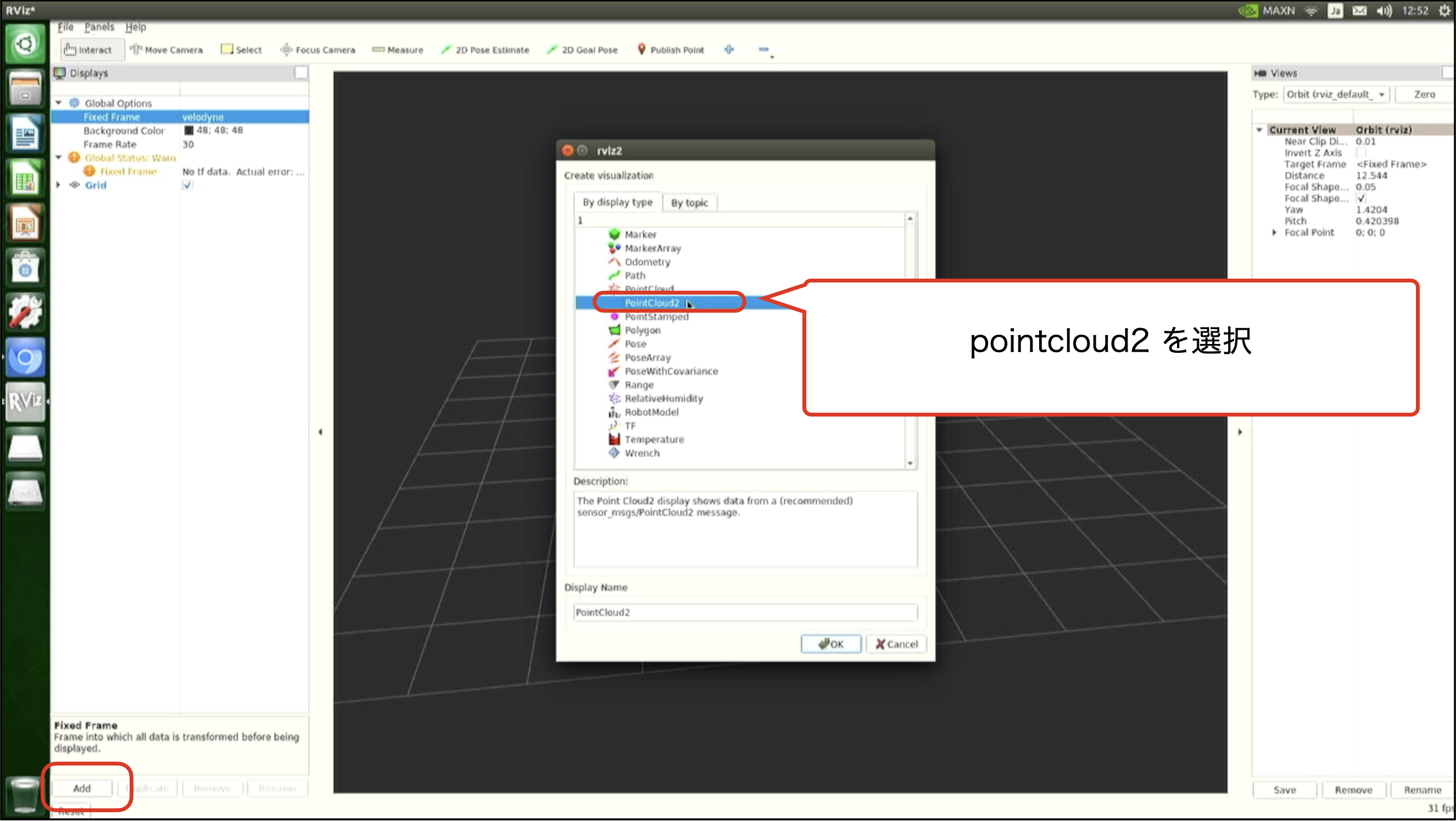
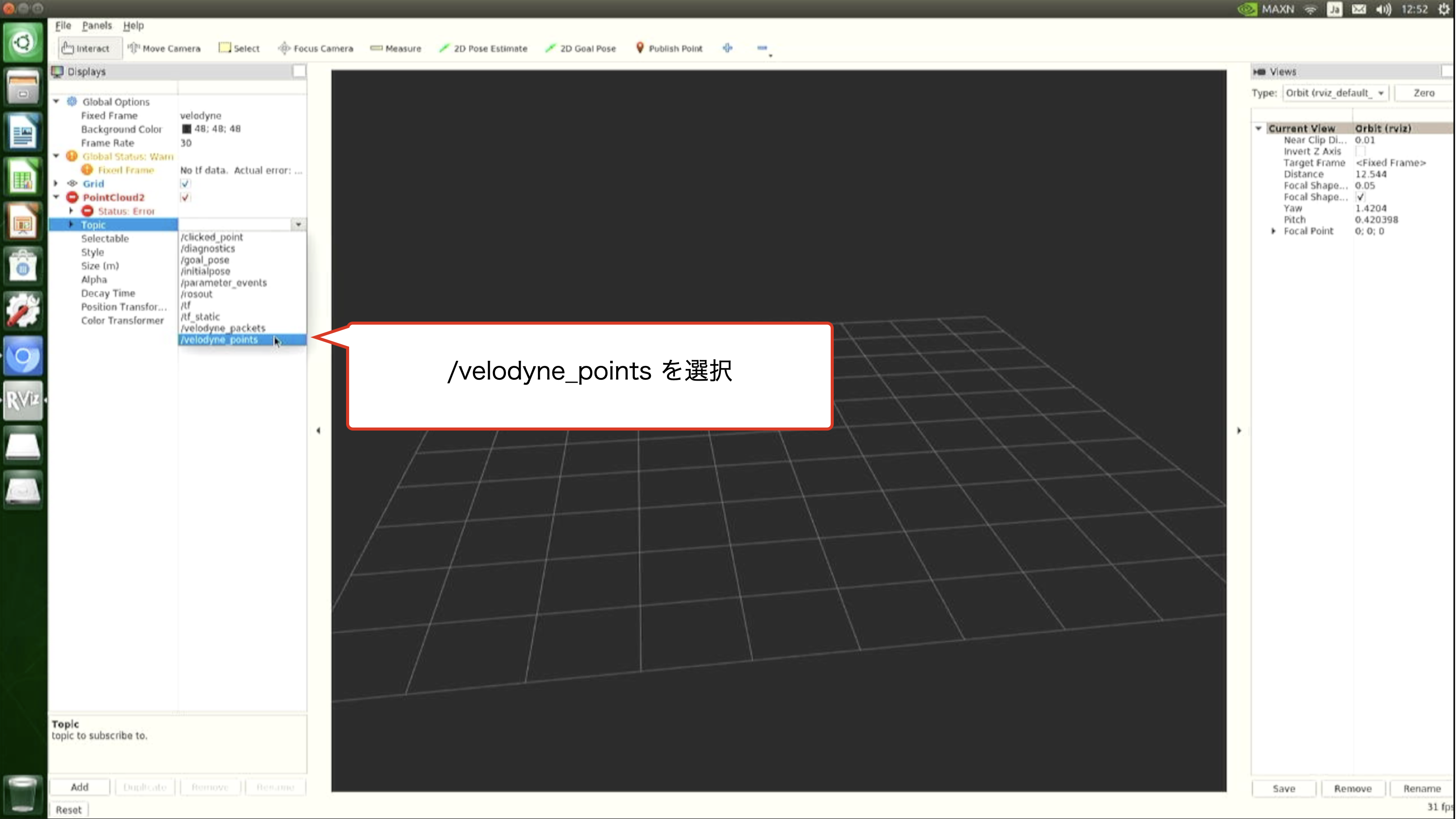
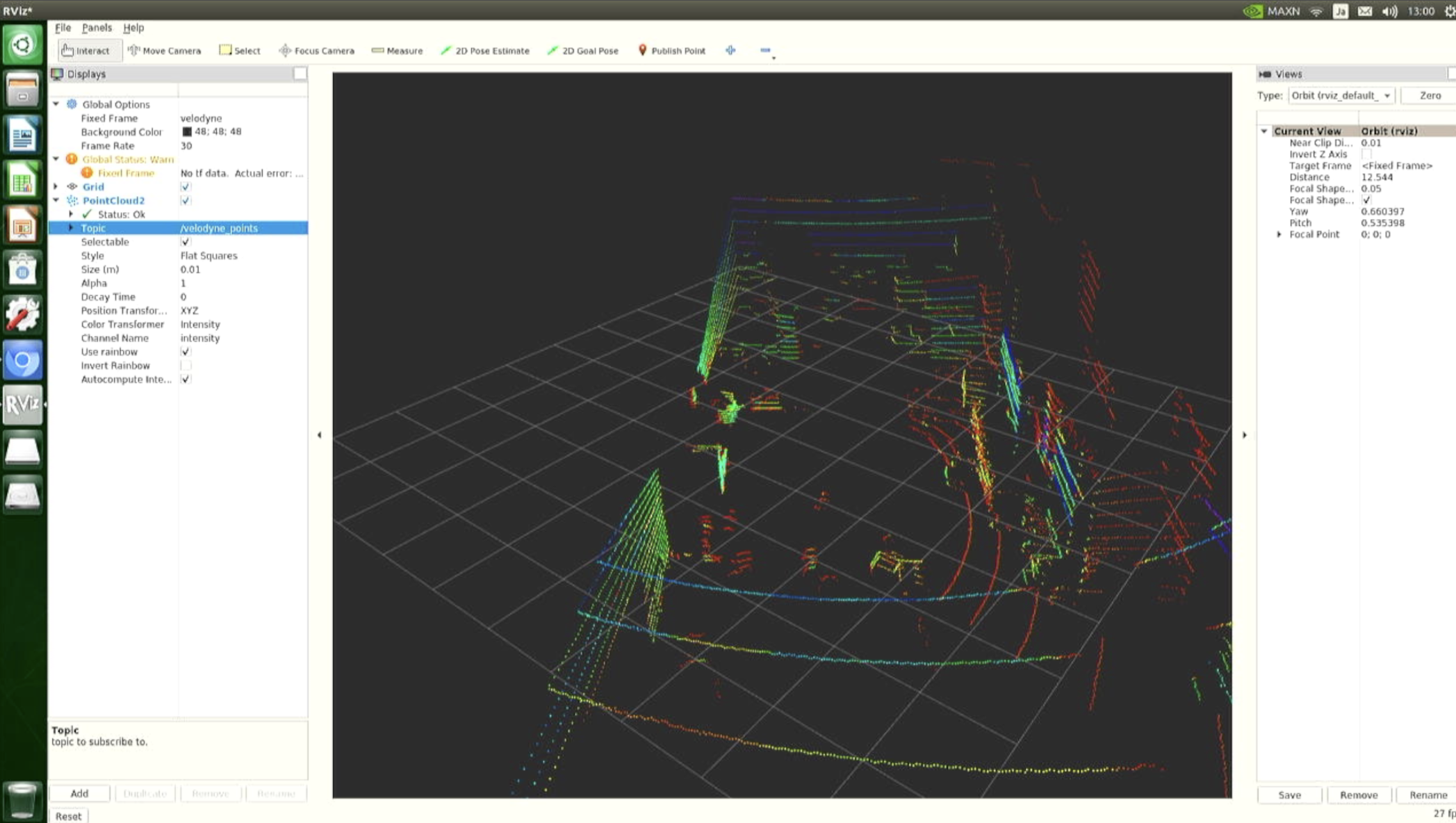
rviz2
rviz2の設定