概要
ObiRopeをVRで登ってみたかったので、本記事では登るシステムの基礎となる、ObiRopeをXR Interaction Toolkitで掴む実装の仕方について説明します。
ObiRooeを掴む様子は以下のXの投稿で確認できます。
検証環境
Unity 2022.3.11f1
XRInteractionToolKit ver2.5.2
ObiRope 6.5.4
Meta Quest3
ObiRope
このアセットはロープをUnityで使う上で鉄板のアセットです。
AssetStore
どういうアセットかは、Qiitaに良い記事があるので参照してください。
https://qiita.com/Sase/items/0debe55ad0d80374a36a
https://qiita.com/OKsaiyowa/items/2f5e9dff5992dd18a65c
XRInteractionToolKitセットアップ
XRInteractionToolKitに関する説明は以下のサイトが詳しいです。
https://tech.framesynthesis.co.jp/unity/xr/
PackageManagerでXRInteractionToolKit(2.5.2)をインストールした後にSamplesからStartarAssetsをDownLoad & importしておきます。このStartarAssetsにあるXR Interaction Setup prefabを使います。なお、本記事のソースコードはver2.5.2を利用しているので、他のバージョンだと互換性が無いかもしれないです。
XRInteractionToolKitにてObiRopeを掴む
順を追って説明していきます。
ObiRopeを掴む為のオブジェクトの実装
ObiRopeはObiPhysicsという独自の物理演算で衝突判定を計算している為、Unityの物理演算で衝突判定をとることが出来ないので、そのままではXRInteractionToolkitでGrabする事はできません。
XRInteractionToolkitでObiRopeを掴むために、XRInteractionToolKitとObiropeのハブとなるオブジェクトを用意します。このオブジェクトは以下の動画の青い球のように、コントローラーの動きにしたがってロープを移動し、コントローラーで掴んだ後は後述のObiParticleAttachimentでロープを追従させます。
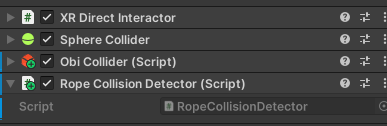
この追従するオブジェクトは下記のようにUnityのCollider,RigidBody,XRGrabInteractable,XRGrabInteractable(XRInteractionToolkitで掴むオブジェクトにアタッチするもの)とObiPhysicsのObiColliderとObiRigidbody(後述するObiParticleAttachimentで使う)と、構成になっており、XRInteractionToolkitとObiRopeの橋渡し役になっています。
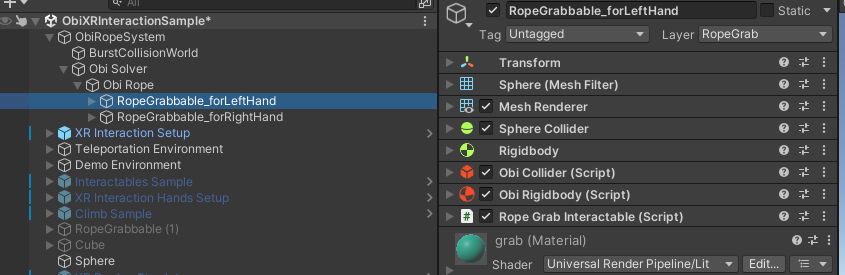
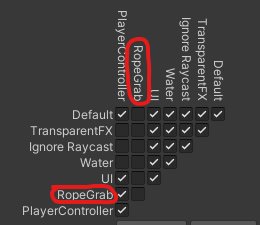
尚、橋渡しオブジェクトのLayerはお互いに干渉しないようにセッティングしてあります。また、Grabは出来るように、XRInteractionToolkit側のレイヤー(コチラで追加したPlayerControllerレイヤー)とだけ干渉出来るようにしてあります。
コントローラーに一番近いObiRope上の座標を取得する
ObiRopeとコントローラーが接触しているときに、コントローラーに一番近いObiRope上の座標を計算します。この座標に橋渡し役のオブジェクトを配置するためです。
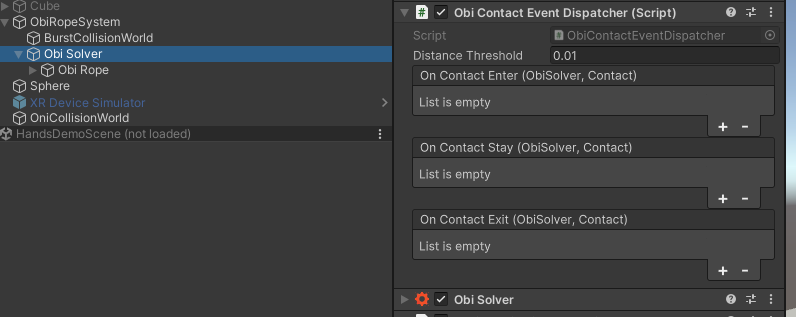
ObiPhysicsの衝突検知をするには、以下のようにObiSolverにObiContactEventDispatcherをアタッチします。
次にコントローラー側からRopeへの衝突検知をする為のRopeCollisionDetectorをXR Interaction Setup以下にあるDirect Interactorにアタッチします。
RopeCollisionDetectorは以下のクラスになります。
using Obi;
using UnityEngine;
using UnityEngine.XR.Interaction.Toolkit;
/// <summary>
/// XRDirectInteractorがあるGameObjectにアタッチするObiRopeの衝突検知用クラス。
/// XRDirectInteractorに一番近いObiRope上の座標を衝突時のパラメタとして渡す
/// </summary>
[RequireComponent(typeof(XRDirectInteractor))]
[RequireComponent(typeof(ObiCollider))]
public class RopeCollisionDetector : MonoBehaviour
{
public bool IsLeft { get; private set;}
private ObiContactEventDispatcher contactEventDispatcher;
private XRDirectInteractor interactor;
ObiCollider selfCollider;
private void Awake()
{
this.selfCollider = GetComponent<ObiCollider>();
this.contactEventDispatcher = FindObjectOfType<ObiContactEventDispatcher>();
var interactionGroup = GetComponentInParent<XRInteractionGroup>();
//XRInteractionToolKit(ver2.5.2)のStarterAssetsのXR Interaction Setupには、右手、左手を区別できるパラメタが設定されている
if (interactionGroup.groupName == XRInteractionGroup.GroupNames.k_Left)
{
this.IsLeft = true;
}
this.interactor = GetComponent<XRDirectInteractor>();
}
private void OnEnable()
{
this.contactEventDispatcher.onContactEnter.AddListener(SolverContact_OnCollisionEnter);
this.contactEventDispatcher.onContactStay.AddListener(SolverContact_OnCollisionStay);
this.contactEventDispatcher.onContactExit.AddListener(SolverContact_OnExit);
}
private void OnDisable()
{
this.contactEventDispatcher.onContactEnter.RemoveListener(SolverContact_OnCollisionEnter);
this.contactEventDispatcher.onContactStay.RemoveListener(SolverContact_OnCollisionStay);
this.contactEventDispatcher.onContactExit.RemoveListener(SolverContact_OnExit);
}
public void SolverContact_OnCollisionEnter(ObiSolver sender, Oni.Contact contact)
{
AnalyzeContact(sender, contact, (ObiRope obiRope, Vector3 projectPos, Vector3 ropeDirection) =>
{
if (this.IsLeft)
{
obiRope.GetComponent<Rope>().LeftRopeGrabInteractable.OnObiCollisionEnter(this.interactor, projectPos, ropeDirection);
}
else
{
obiRope.GetComponent<Rope>().RightRopeGrabInteractable.OnObiCollisionEnter(this.interactor, projectPos, ropeDirection);
}
});
}
public void SolverContact_OnCollisionStay(ObiSolver sender, Oni.Contact contact)
{
AnalyzeContact(sender, contact, (ObiRope obiRope, Vector3 projectPos, Vector3 ropeDirection) =>
{
if (this.IsLeft)
{
obiRope.GetComponent<Rope>().LeftRopeGrabInteractable.OnObiCollisionStay(this.interactor, projectPos, ropeDirection);
}
else
{
obiRope.GetComponent<Rope>().RightRopeGrabInteractable.OnObiCollisionStay(this.interactor, projectPos, ropeDirection);
}
});
}
public void SolverContact_OnExit(ObiSolver sender, Oni.Contact contact)
{
AnalyzeContact(sender, contact, (ObiRope obiRope, Vector3 projectPos, Vector3 ropeDirection) =>
{
if (this.IsLeft)
{
obiRope.GetComponent<Rope>().LeftRopeGrabInteractable.OnObiCollisionExit(this.interactor, projectPos, ropeDirection);
}
else
{
obiRope.GetComponent<Rope>().RightRopeGrabInteractable.OnObiCollisionExit(this.interactor, projectPos, ropeDirection);
}
});
}
private void AnalyzeContact(ObiSolver sender, Oni.Contact contact, System.Action<ObiRope, Vector3, Vector3> OnCollisionAction)
{
int simplexIndex = sender.simplices[contact.bodyA];
var particleInActor = sender.particleToActor[simplexIndex];
var world = ObiColliderWorld.GetInstance();
var contactCollider = world.colliderHandles[contact.bodyB].owner;
if ((particleInActor.actor is ObiRope) && contactCollider == selfCollider)
{
var obiRope = particleInActor.actor as ObiRope;
if (obiRope.TryGetNearestParticleIndex(this.transform.position, out var outParticleIndex))
{
if (obiRope.TryGetRopeProjectionPosition(this.transform.position, outParticleIndex, sender, out var projectionPosition, out var outRopeDirection))
{
OnCollisionAction?.Invoke(obiRope, projectionPosition, outRopeDirection);
}
}
}
}
}
下記クラスはObiRopeの座標計算に利用する拡張クラスです。
using Obi;
using UnityEngine;
public static class ObiRopeExtension
{
/// <summary>
/// targetWorldPositionに一番近いObiRope中のパーティクルのindexを取得します。
/// </summary>
/// <param name="rope"></param>
/// <param name="targetWorldPosition"></param>
/// <param name="outParticleIndex"></param>
/// <returns></returns>
public static bool TryGetNearestParticleIndex(this ObiRope rope, Vector3 targetWorldPosition, out int outParticleIndex)
{
var distance = 10000f;
var targetIndex = -1;
foreach (var particleIndex in rope.solver.simplices)
{
var particlePos = GetParticleWorldPosition(rope, particleIndex);
var currentDistance = Vector3.Distance(particlePos, targetWorldPosition);
if (currentDistance < distance)
{
distance = currentDistance;
targetIndex = particleIndex;
}
}
if (targetIndex == -1)
{
outParticleIndex = -1;
return false;
}
outParticleIndex = targetIndex;
return true;
}
public static Vector3 GetParticleWorldPosition(this ObiRope rope, int particleIndex)
{
var solver = rope.solver;
Matrix4x4 solver2World = solver.transform.localToWorldMatrix;
return solver2World.MultiplyPoint3x4(solver.positions[particleIndex]);
}
/// <summary>
/// projectionWorldTarget座標に一番近いRope上の座標を取得します。
/// </summary>
/// <param name="rope"></param>
/// <param name="projectionWorldTarget"></param>
/// <param name="mostCloseParticleIndex"></param>
/// <param name="solver"></param>
/// <param name="outPos"></param>
/// <param name="outDirection"></param>
/// <returns></returns>
public static bool TryGetRopeProjectionPosition(this ObiRope rope, Vector3 projectionWorldTarget, int mostCloseParticleIndex, ObiSolver solver, out Vector3 outPos, out Vector3 outDirection)
{
Matrix4x4 solver2World = solver.transform.localToWorldMatrix;
if (rope.TryFindElement(mostCloseParticleIndex, out var outElement))
{
var currentIndex = outElement.particle2;
var nextIndex = outElement.particle1;
var currentParticlePos = solver2World.MultiplyPoint3x4(solver.positions[currentIndex]);
var nextParticlePos = solver2World.MultiplyPoint3x4(solver.positions[nextIndex]);
outPos = ObiUtils.ProjectPointLine(projectionWorldTarget, currentParticlePos, nextParticlePos, out var mu, false);
outDirection = (nextParticlePos - currentParticlePos).normalized;
}
else
{
outPos = solver2World.MultiplyPoint3x4(solver.positions[mostCloseParticleIndex]);
outDirection = Vector3.up;
}
return true;
}
private static bool TryFindElement(this ObiRope rope, int index, out ObiStructuralElement element)
{
foreach (var one in rope.elements)
{
if (one.particle1 == index)
{
element = one;
return true;
}
}
element = null;
return false;
}
}
橋渡しオブジェクトを掴んでObiRopeを動かす
ObiRopeを動かすにはObiParticleAttachmentを利用します。ObiParticleAttachmentはUnityのFixedJointのように機能します。下記はRopeの上端にオブジェクトを配置して、ObiParticleAttachmentでオブジェクトが動くとObiRopeも連動して動くようにしたものです。
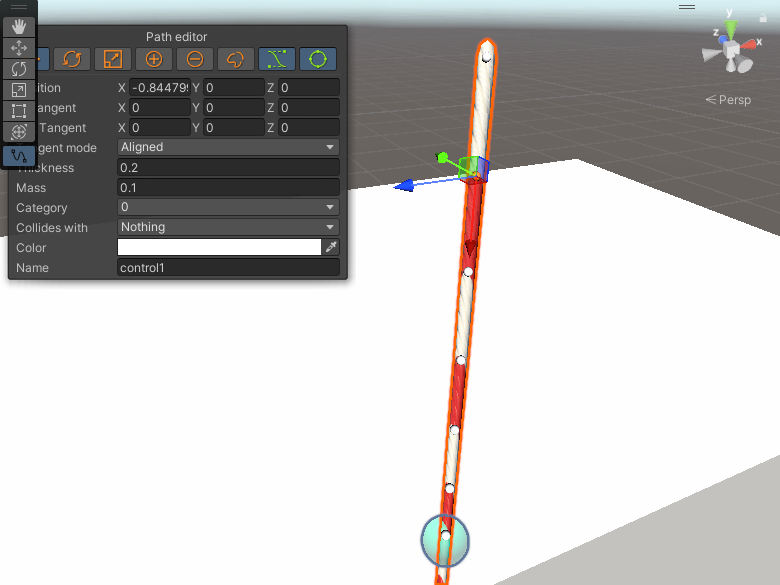
ObiRopeを掴んで動かす用のControlPointを追加する
PathEditorにてRopeにControlPointを追加します。(ControlPointを追加すると内部でParticleGroupが生成されます)ObiParticleAttachmentはこのParticleGroupを基準にRopeを動かします。追加するPaticleGroupは自分の検証では2mのRopenに対して10個ぐらい挿入しました。
動的にObiParticleAttachmentをOnOffする。
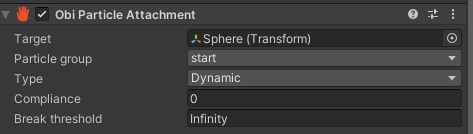
ObiParticleAttachmentのパラメータは以下のようになります。
- Target
- ObiRopeにアタッチしたいTransform
- ParticleGroup
- PathEditorで追加したPath(Nameの部分がParticleGroupの名前になる)
- Type
- 動的にObiParticleAttachmentをアタッチしたりする場合はDynamicに設定。
- Compliance
- デフォルト値の0でOK。
- Break threshold
- デフォルト値のInfinityでOK。
- デフォルト値のInfinityでOK。
ParticleGroupは上記で追加したControlPointの中から橋渡しオブジェクトに一番近いものを選択します。
private ObiParticleGroup FindNearObiParticleGroup(Transform target)
{
var distance = 100000f;
ObiParticleGroup findParticleGroup = null;
foreach(var group in this.obiRope.blueprint.groups)
{
foreach(var particleindex in group.particleIndices)
{
//ObiRopeExtension参照
var particlePosition = this.obiRope.GetParticleWorldPosition(particleindex);
var currentDistance = Vector3.Distance(target.position, particlePosition);
if(currentDistance <= distance)
{
distance = currentDistance;
findParticleGroup = group;
}
}
}
return findParticleGroup;
}
また、一回GameObjectにアタッチされたObiParticleAttachmentはenableをON,OFFする事でTargetに付けたり外したり出来ます。
掴まれる側の実装
XRinteractionToolkitのXRGrabInteractableをオーバーライドして作成します。GrabしたときにObiRopeと橋渡しオブジェクトをObiParticleAttachmentでアタッチし、DropしたときにObiParticleAttachmentを無効にします。また、コントローラーとObiRopeとの衝突結果を座標で受け取って位置を同期する役割もあります。
using UnityEngine;
using UnityEngine.XR.Interaction.Toolkit;
/// <summary>
/// ObiRopeとの橋渡しオブジェクトを掴む為のクラス
/// </summary>
public class RopeGrabInteractable : XRGrabInteractable
{
enum FollowState
{
No,
Follow
}
enum GrabState
{
No,
Grab
}
[SerializeField] private FollowState followState;
[SerializeField] private GrabState grabState = GrabState.No;
[SerializeField] private Rope rope;
private Rigidbody selfRigidbody;
private XRDirectInteractor interactor = null;
private Vector3 grabRopePosition;
private Vector3 grabRopeDirection;
protected override void Awake()
{
base.Awake();
this.followState = FollowState.No;
this.interactor = null;
this.selfRigidbody = GetComponent<Rigidbody>();
this.rope = this.GetComponentInParent<Rope>();
if(this.rope!=null) this.transform.parent = this.rope?.transform.parent;
}
protected override void Grab()
{
this.grabState = GrabState.Grab;
base.Grab();
if (firstInteractorSelecting.hasSelection)
{
this.rope.AddOrEnableParticleAttachment(this, this.transform);
}
}
protected override void Drop()
{
this.grabState = GrabState.No;
base.Drop();
this.rope.DisableParticleAttachment(this);
}
public void OnObiCollisionEnter(XRDirectInteractor xRDirectInteractor, Vector3 ropePoint, Vector3 ropeDirection)
{
if (this.interactor != null) return;
this.followState = FollowState.Follow;
this.interactor = xRDirectInteractor;
SetFollowParameter(ropePoint, ropeDirection);
}
public void OnObiCollisionStay(XRDirectInteractor xRDirectInteractor, Vector3 ropePoint, Vector3 ropeDirection)
{
SetFollowParameter(ropePoint, ropeDirection);
}
public void OnObiCollisionExit(XRDirectInteractor xRDirectInteractor, Vector3 ropePoint, Vector3 ropeDirection)
{
this.interactor = null;
this.followState = FollowState.No;
}
private void SetFollowParameter(Vector3 grabRopePosition, Vector3 grabRopeDirection)
{
this.grabRopePosition = grabRopePosition;
this.grabRopeDirection = grabRopeDirection;
}
/// <summary>
/// コントローラーと連動して動かす
/// </summary>
private void FixedUpdate()
{
if(this.followState == FollowState.Follow && this.grabState == GrabState.No)
{
this.selfRigidbody.MovePosition(grabRopePosition);
}
}
}
using Obi;
using System.Collections.Generic;
using Unity.VisualScripting;
using UnityEngine;
/// <summary>
/// ObiRopeにアタッチする
/// </summary>
[RequireComponent(typeof(ObiRope))]
public class Rope : MonoBehaviour
{
public RopeGrabInteractable LeftRopeGrabInteractable => this.leftRopeGrabInteractable;
public RopeGrabInteractable RightRopeGrabInteractable => this.rightRopeGrabInteractable;
[SerializeField] RopeGrabInteractable leftRopeGrabInteractable;
[SerializeField] RopeGrabInteractable rightRopeGrabInteractable;
ObiRope obiRope;
Dictionary<RopeGrabInteractable, ObiParticleAttachment> attachimentDict = new Dictionary<RopeGrabInteractable, ObiParticleAttachment>();
private void Awake()
{
this.obiRope = this.GetComponent<ObiRope>();
}
/// <summary>
/// ObiParticleAttachmentをtargetに対して有効にする
/// </summary>
/// <param name="ropeGrabInteractable"></param>
/// <param name="target"></param>
public void AddOrEnableParticleAttachment(RopeGrabInteractable ropeGrabInteractable, Transform target)
{
if (!this.attachimentDict.ContainsKey(ropeGrabInteractable))
{
var particleAttachment = this.AddComponent<ObiParticleAttachment>();
particleAttachment.target = target;
particleAttachment.attachmentType = ObiParticleAttachment.AttachmentType.Dynamic;
particleAttachment.particleGroup = FindNearObiParticleGroup(target);
this.attachimentDict[ropeGrabInteractable] = particleAttachment;
}
else
{
this.attachimentDict[ropeGrabInteractable].particleGroup = FindNearObiParticleGroup(target);
this.attachimentDict[ropeGrabInteractable].enabled = true;
}
}
/// <summary>
/// ObiParticleAttachmentをtarget無効にする
/// </summary>
/// <param name="ropeGrabInteractable"></param>
public void DisableParticleAttachment(RopeGrabInteractable ropeGrabInteractable)
{
if (this.attachimentDict.ContainsKey(ropeGrabInteractable))
{
this.attachimentDict[ropeGrabInteractable].enabled = false;
}
}
private ObiParticleGroup FindNearObiParticleGroup(Transform target)
{
var distance = 100000f;
ObiParticleGroup findParticleGroup = null;
foreach(var group in this.obiRope.blueprint.groups)
{
foreach(var particleindex in group.particleIndices)
{
var particlePosition = this.obiRope.GetParticleWorldPosition(particleindex);
var currentDistance = Vector3.Distance(target.position, particlePosition);
if(currentDistance <= distance)
{
distance = currentDistance;
findParticleGroup = group;
}
}
}
return findParticleGroup;
}
}