皆さんはRViz2は使っているでしょうか?しかし、SSHで接続し、GUIを無効にしてROS2を動かしている方も多いのではないでしょうか。そんな方におすすめしたい、使いやすい可視化ツールを紹介します。
Foxgloveとは
公式サイトより。
Foxglove Studioは、ロボット工学データのためのオープンソースの可視化およびデバッグツールです。スタンドアロンのデスクトップアプリとして実行したり、ブラウザからアクセスしたり、あるいは独自ドメインでセルフホストすることもできます。
今回はデスクトップアプリの方に焦点を当てて紹介したいと思います。
インストール
FoxgloveをインストールするPCにROS2が入っている必要はありません。
👇以下のリンクにあるmacOS,Linux,Windowsのいずれかからダウンロードしてインストールしてください。
ROSbagを見る
Foxgloveの良い点はローカルにROS2がなくてもROSbagを見ることができることです。
デモ用のrosbagを用意したのでfoxgloveをインストールしたPCにダウンロードしてください。
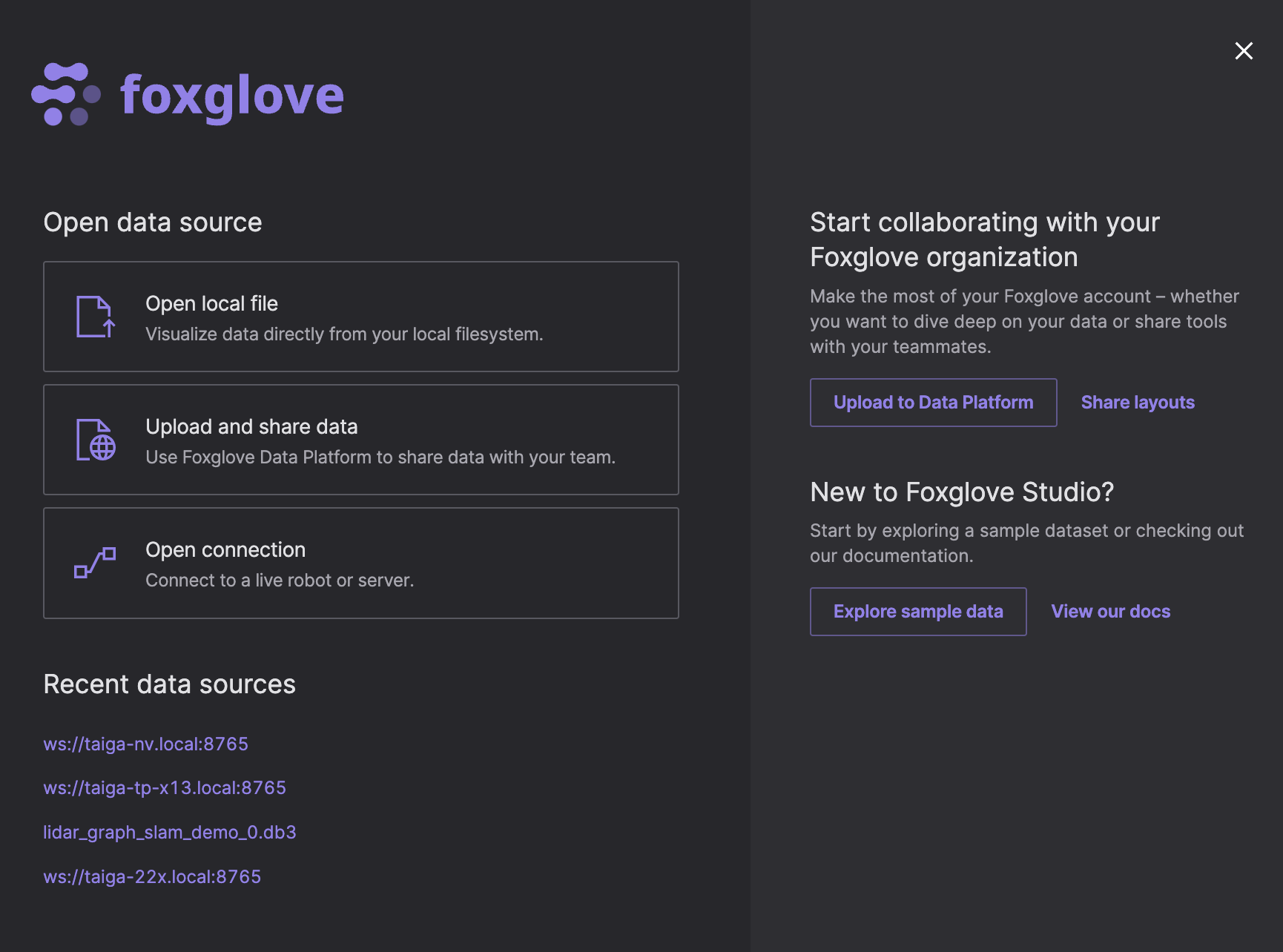
ダウンロードしたらOpen local fileを選択してダウンロードした中にあるmcapファイル選択してください。
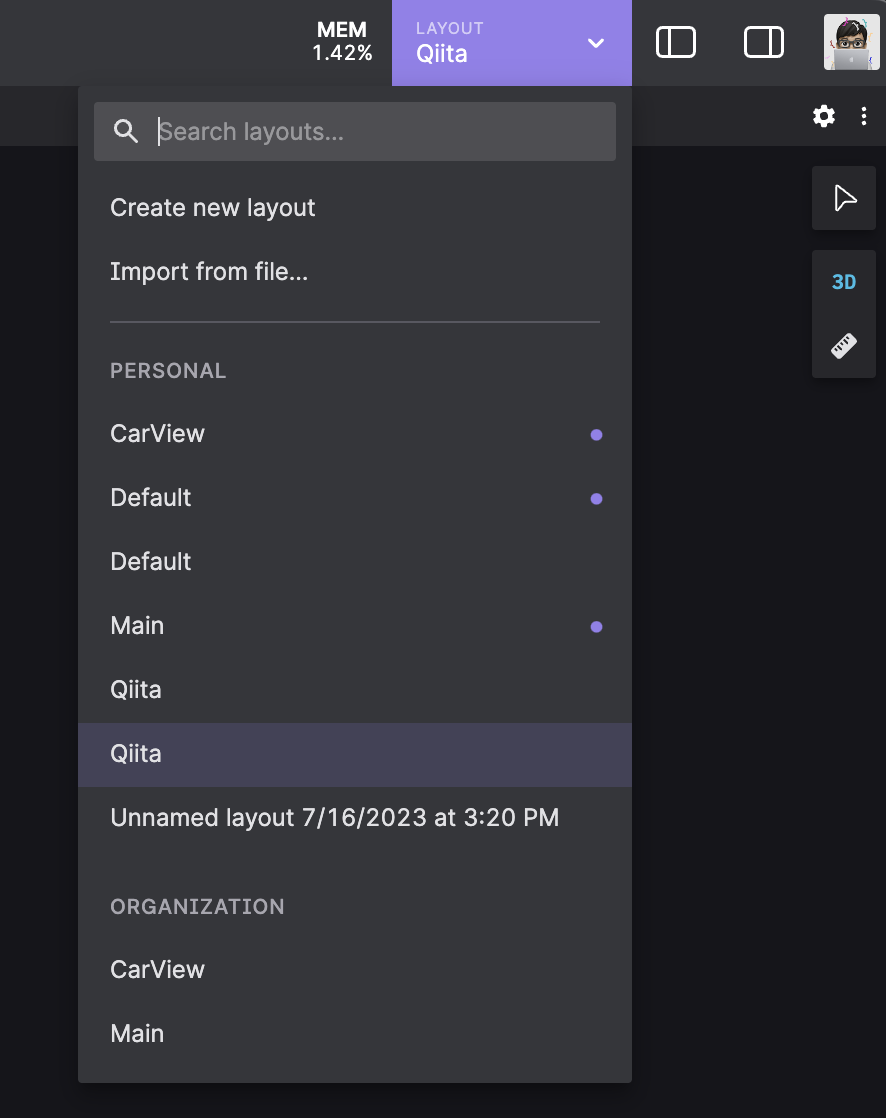
次に右上にあるlayout>Import from fileを選択してダウンロードした中にあるjsonファイルを選択します。
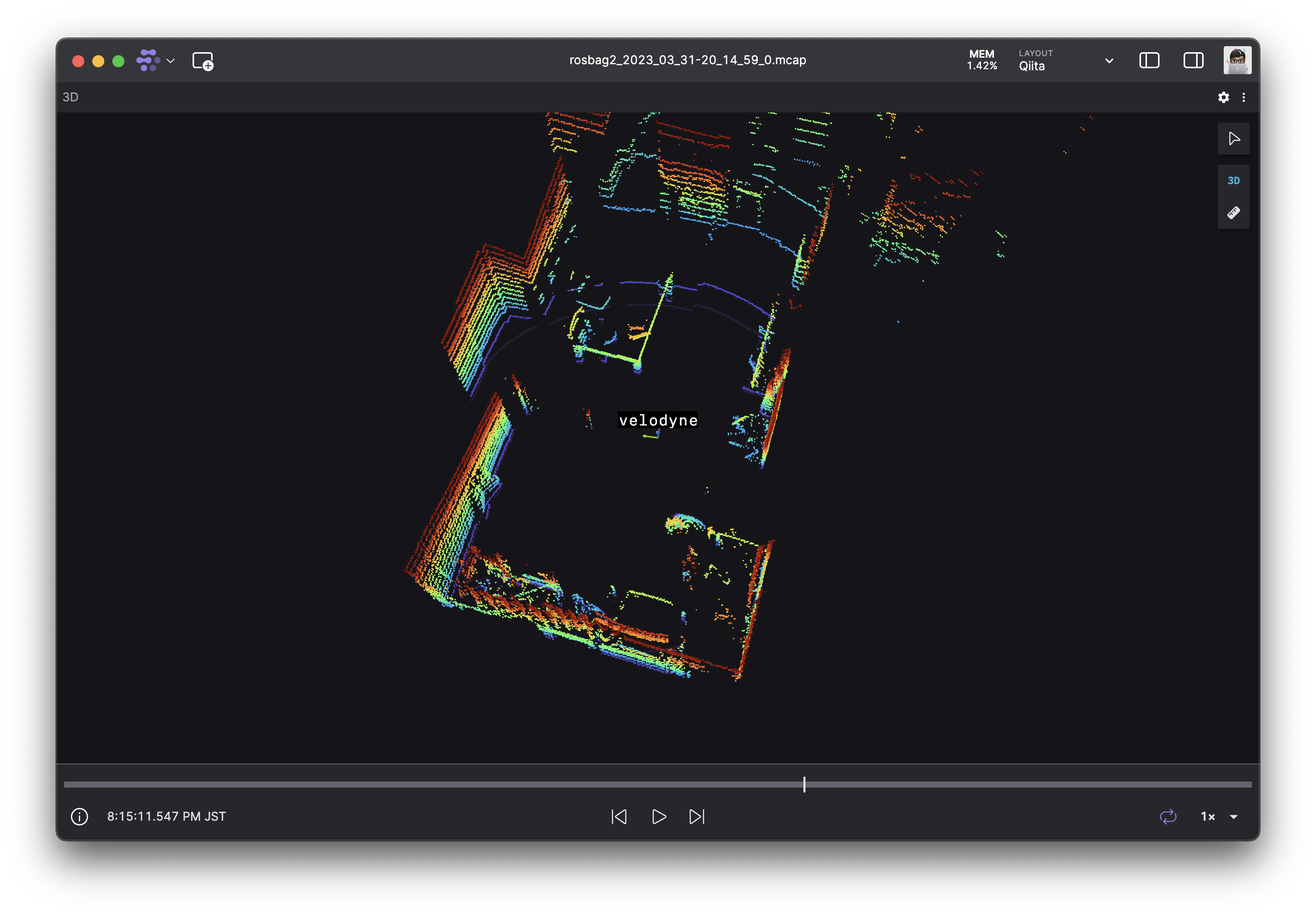
そして中央下にある再生ボタンを押すと点群データが見えると思います。

レイアウトをカスタマイズする
右上にあるこのボタンを押すとパネルをカスタマイズすることができます。使い方はRVizなど変わりありません。

ROS2と繋げる
ROS2を実行している環境(Ubuntu推奨)で以下を実行します。
sudo apt install ros-$ROS_DISTRO-foxglove-bridge
ros2 launch foxglove_bridge foxglove_bridge_launch.xml port:=8765
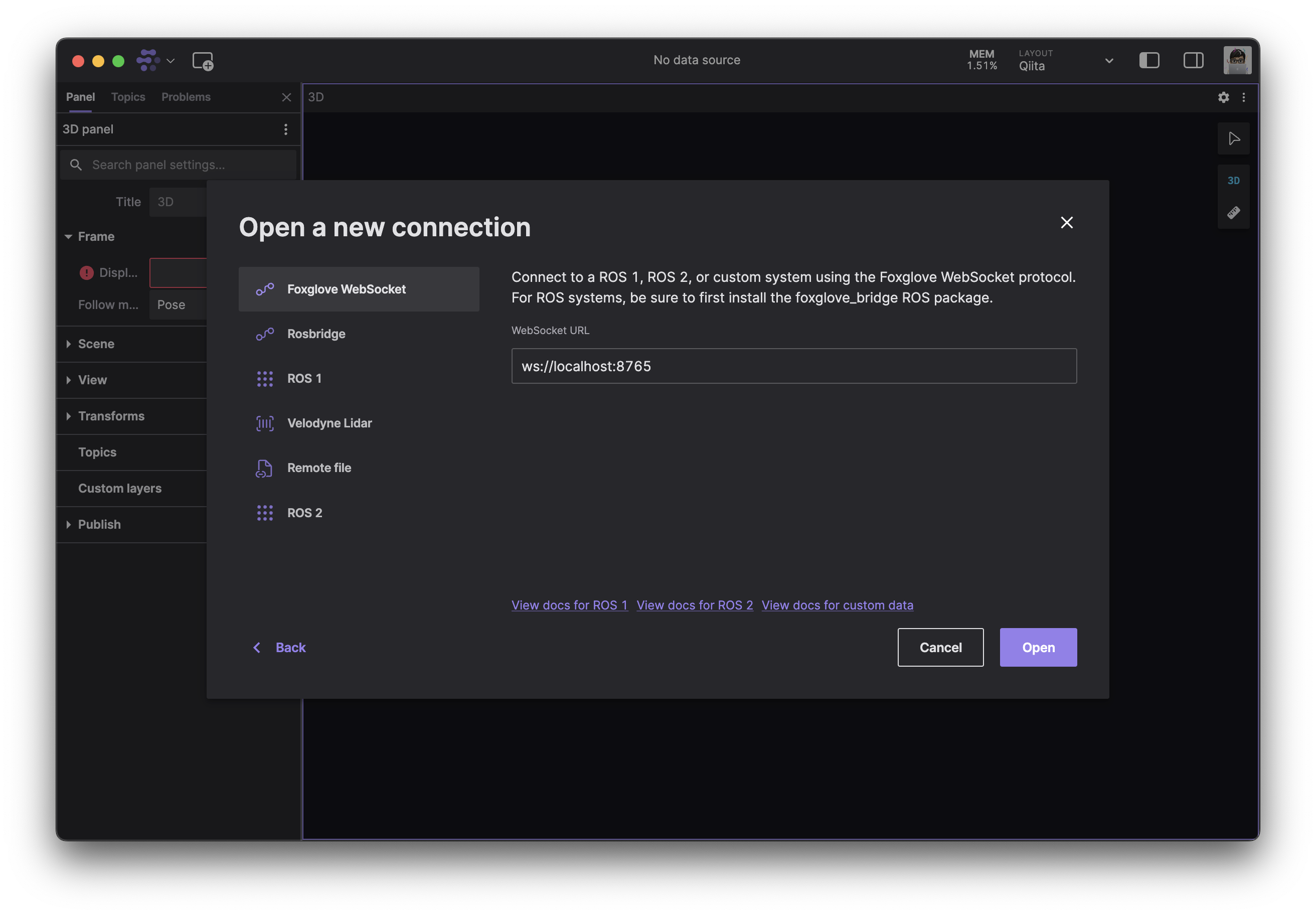
Foxgloveの起動時の画面に戻ってOpenConnectionを選択します。
そして以下のlocalhostの部分をros2 runしたPCのIPアドレスにします。
そしたら接続完了なのでtopicに流れているデータを見ることができます。
最後に
Foxgloveはさまざまなデータの可視化やローカルでのrosbagの再生ができるため、非常に便利です。ぜひ一度試してみてください。ぜひ使っていみてください。詳しく知りたい方は公式ドキュメントや私のほかの記事を参考にしてください。