viz::WCloudを見つけたので3次元点群を色付きで表示してみた
3次元点群可視化用のVizWindow生成
- viz::Viz3d myWindow("Point Cloud");
rgb, depthデータの読み込み
- サンプル(rgb.png, depth.png)がmodules/rgbd/testdata/rgbd/odometryの中にあります
float fx = 525.0f, // default
fy = 525.0f,
cx = 319.5f,
cy = 239.5f;
Mat colorImage;
Mat depth, depth_flt;
colorImage = imread("rgb.png");
depth = imread("depth.png", -1);
imshow("rgb", colorImage);
imshow("depth", depth);
depth.convertTo(depth_flt, CV_32FC1, 1.f / 5000.f);
depth_flt.setTo(std::numeric_limits<float>::quiet_NaN(), depth == 0);
depth = depth_flt;
3次元点群の生成
int height = 480, width = 640;
Mat pCloud(height, width, CV_32FC3);
for (int y = 0; y < 480; y++){
for (int x = 0; x < 640; x++){
if (depth.at<float>(y, x) < 8.0 && depth.at<float>(y, x) > 0.4){
//RGB-D Dataset
float Z = depth.at<float>(y, x);
float X = (x - cx) * Z / fx;
float Y = (y - cy) * Z / fy;
pCloud.at<Vec3f>(y, x) = Vec3f(X, Y, Z);
}
else{
//RGB-D Dataset
pCloud.at<Vec3f>(y, x) = Vec3f(0.f, 0.f, 0.f);
}
}
}
VizWindowに表示
viz::WCloud wcloud(pCloud, colorImage);
myWindow.showWidget("CLOUD", wcloud);
myWindow.spin();
- 3次元点群と色画像のサイズは同じでないといけません
- showWidgetの名前を"CLOUD2"のように変えていくことで簡単に点群を増やして表示できます
- ループの中で点群を増やす場合、myWindow.spinOnce(1, true);で更新すればいいです
ソースコードはこちら
実行準備
OpenCV3.0の導入についてはこちら
Additional Include Directories
$(OPENCV_DIR)\build\include;
C:\Program Files (x86)\PCL 1.7.2\3rdParty\VTK\include\vtk-5.10;
Additional Library Directories
$(OPENCV_DIR)\build\x86\vc12\lib;
C:\Program Files (x86)\PCL 1.7.2\3rdParty\VTK\lib\vtk-5.10;
opencv_vtk_lib.hppはopencv300\build\includeの下に置いてください
※widget_accessorを使わないときVTKは不要です。
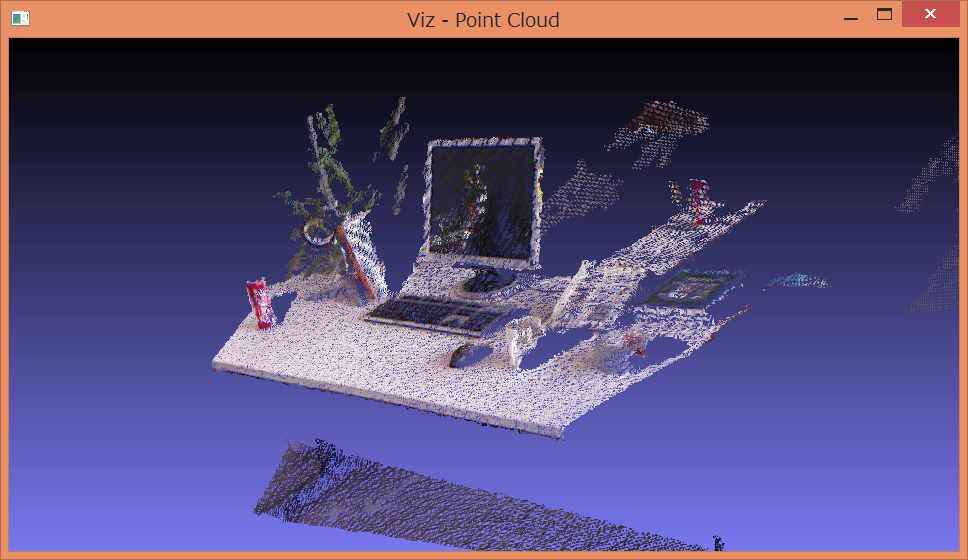
実行結果
最初はこんな感じ。表示するときの座標系が違う。

ドラッグで回転
Shift+ドラッグで平行移動
Ctrl+ドラッグで角度調整
スクロールでズーム