動作環境
- PC (Windows8.1, RAM 8GB, 2 cores @ 2.1GHz)
- Visual Studio 2013
- OpenCV2.4.9以上
- Kinect for WIndows SDK v1.8
- Kinect for Windows Developer Toolkit v1.8.0
- PCL 1.7.2
3D点群処理
Viz Transformations (C++, OpenCV 2.4.x)
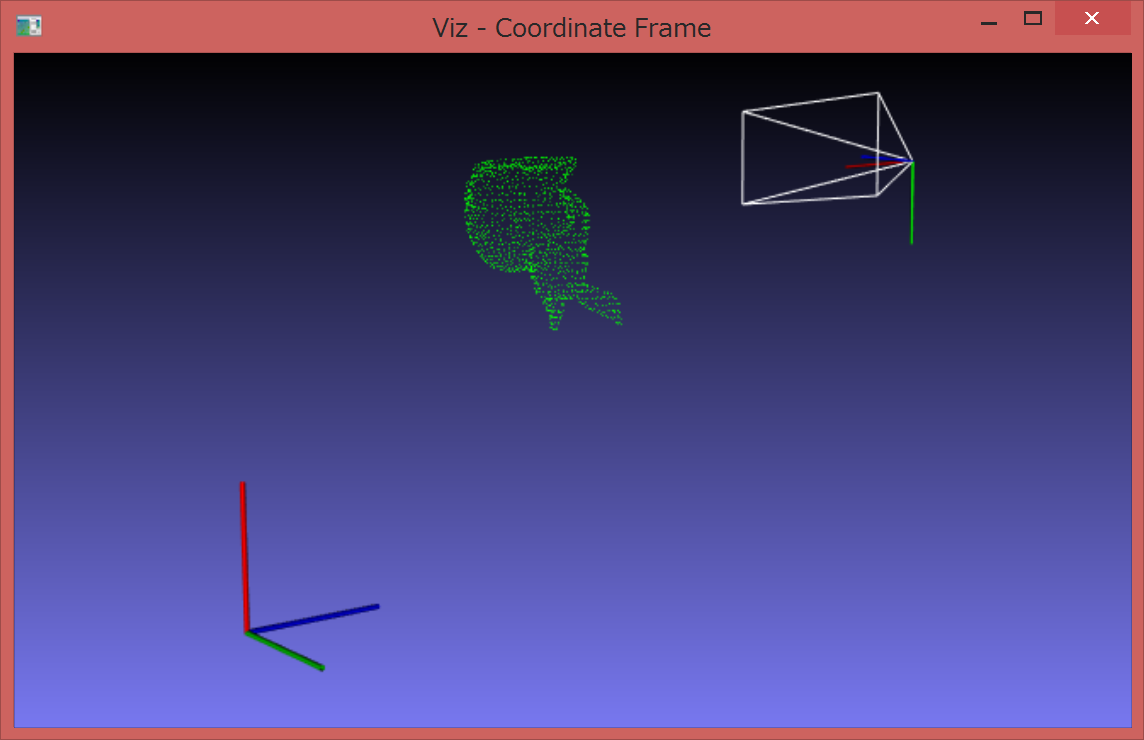
SLAM
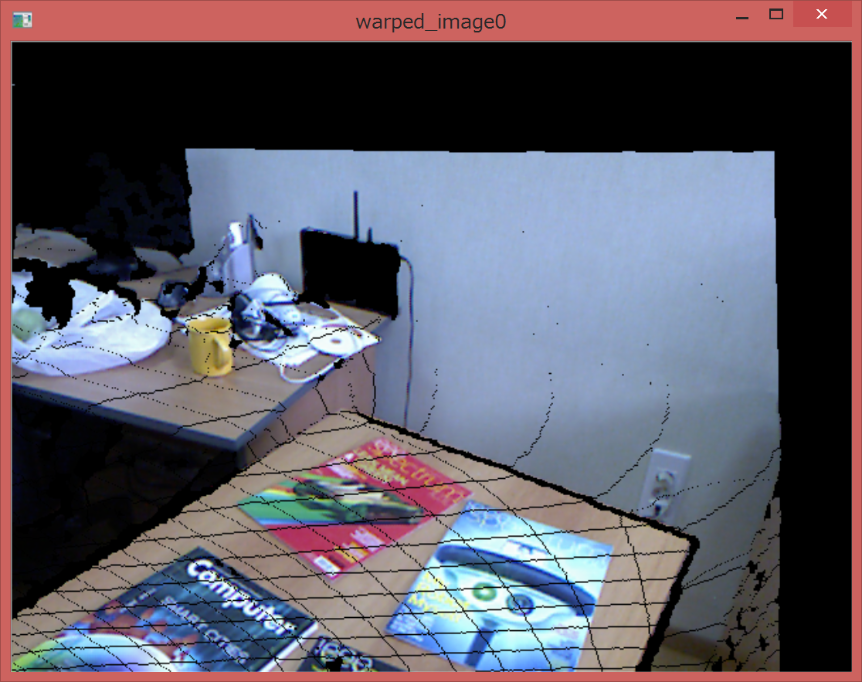
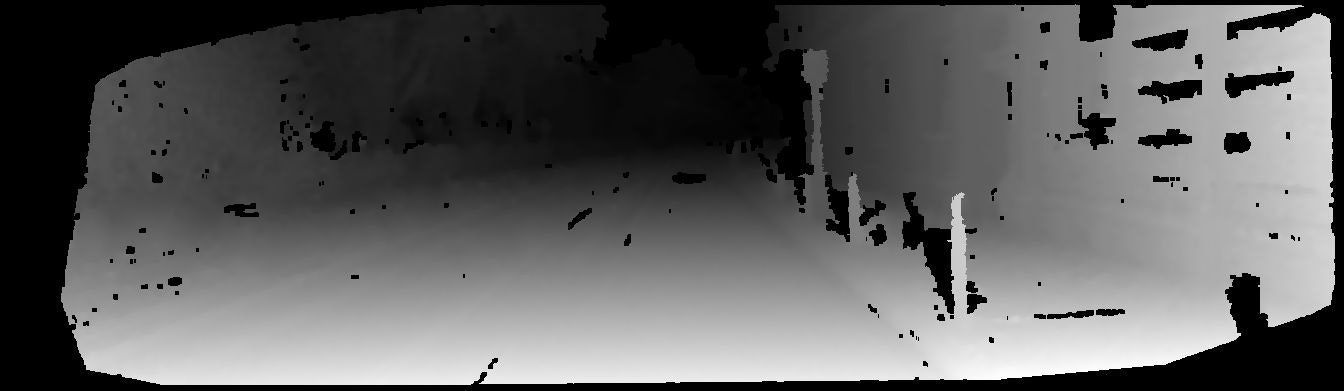
RGB-D Odometry(C++, OpenCV 2.4.x)
- OpenCVのサンプルコード
opencv249\sources\samples\cpp\rgbdodometryのなかにサンプルのRGB-D画像セットがある。
カメラ1(image_00002)からカメラ0(image_00000)へ変換後のRGB-D画像を示す。
デバッグする際の引数の設定例(プロパティからDebugging)
C:\opencv249\sources\samples\cpp\rgbdodometry\image_00000.png C:\opencv249\sources\samples\cpp\rgbdodometry\depth_00000.png C:\opencv249\sources\samples\cpp\rgbdodometry\image_00002.png C:\opencv249\sources\samples\cpp\rgbdodometry\depth_00002.png -rbm
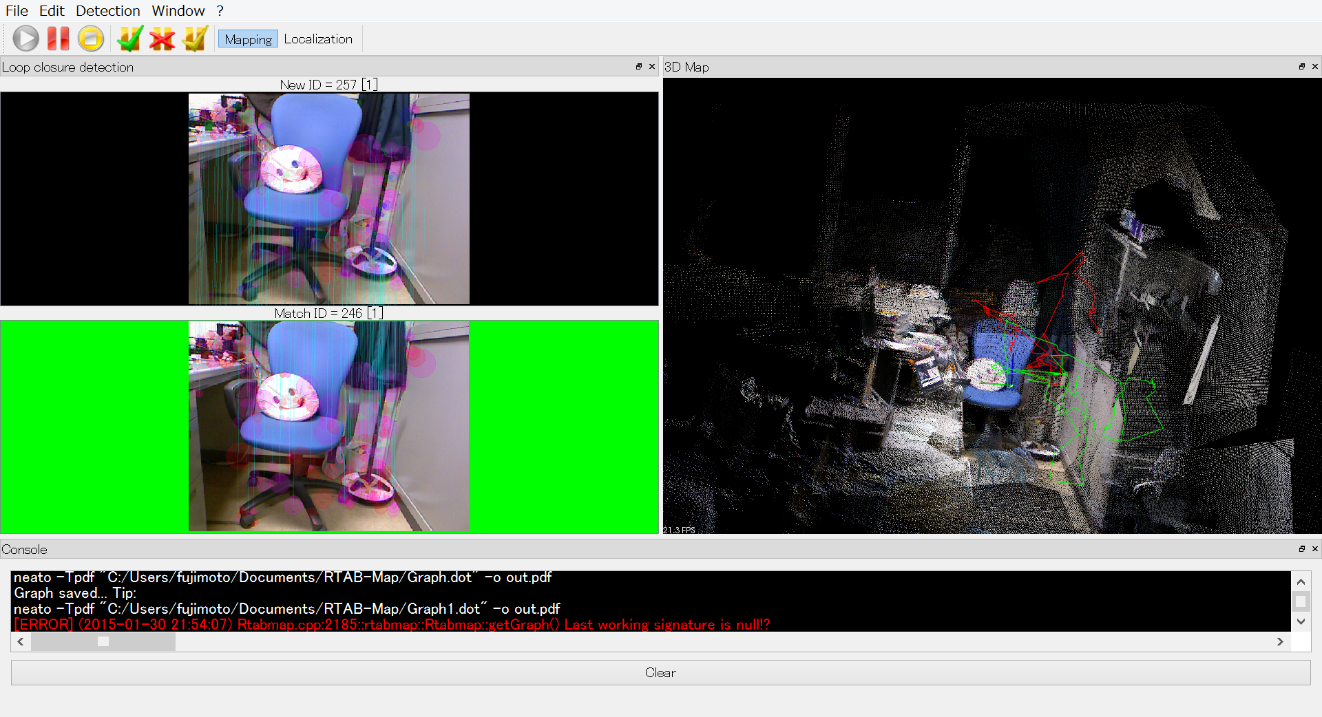
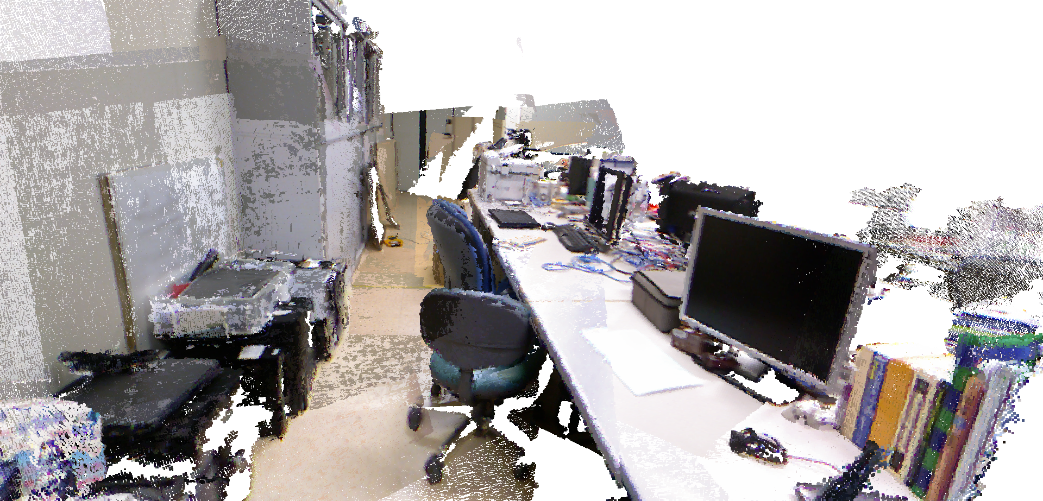
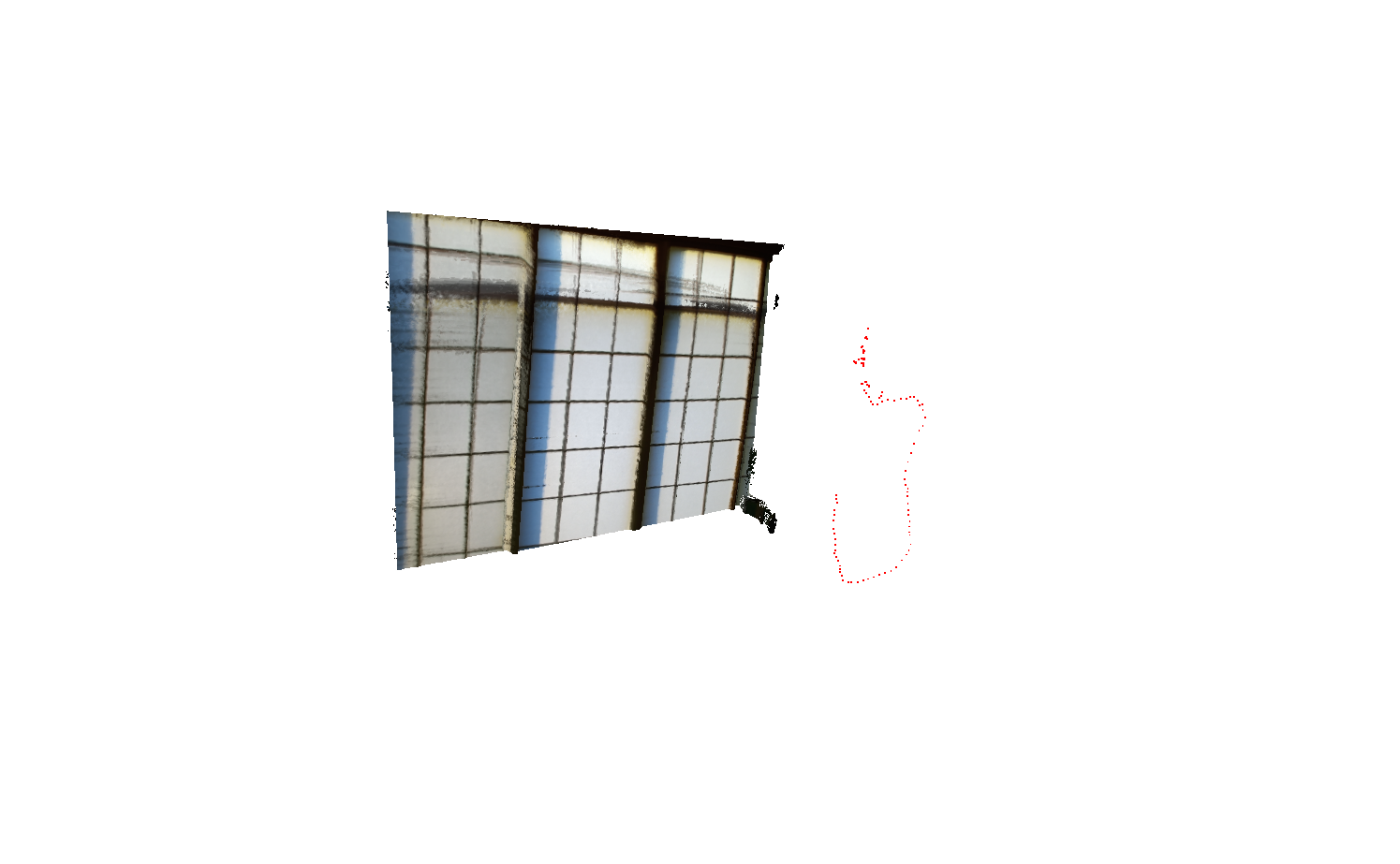
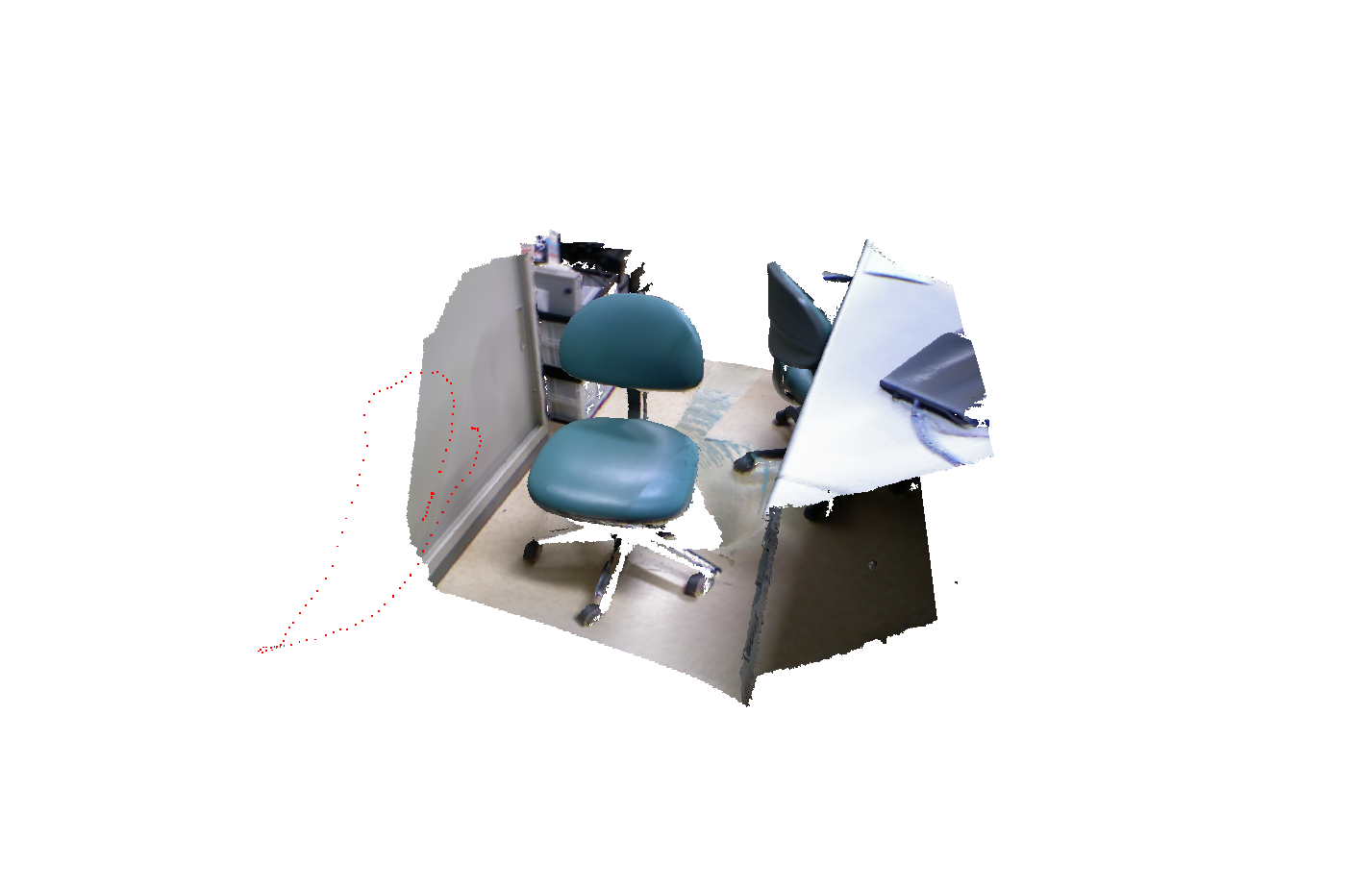
RTAB-Map(C++, OpenCV 2.4.x, PCL)
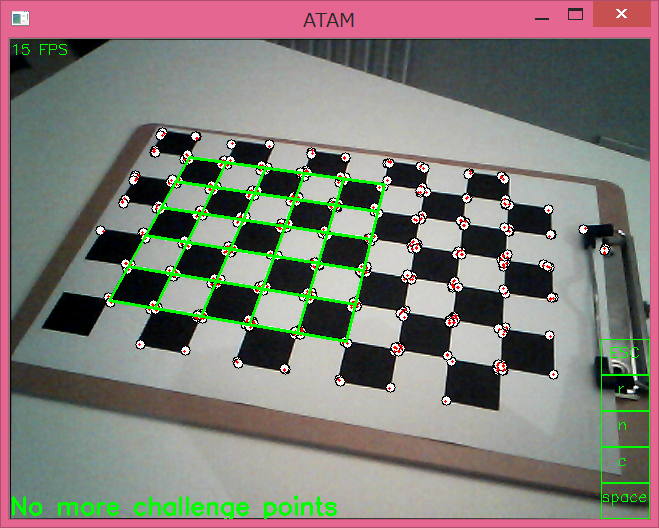
ATAM(C++, OpenCV 3.0, cvsba, LAPACK)
- ソースコード
- ISMAR 2015 tracking competition vSLAMのサンプルプログラム
Kinect v2
KinectFusion(C++, OpenCV 2.4.x)
Kinect v1
KinectFusion (C++, OpenCV 2.4.x)
フィルタリング
Real-Time Depth Map Refinement (C++, OpenCV 2.4.x)

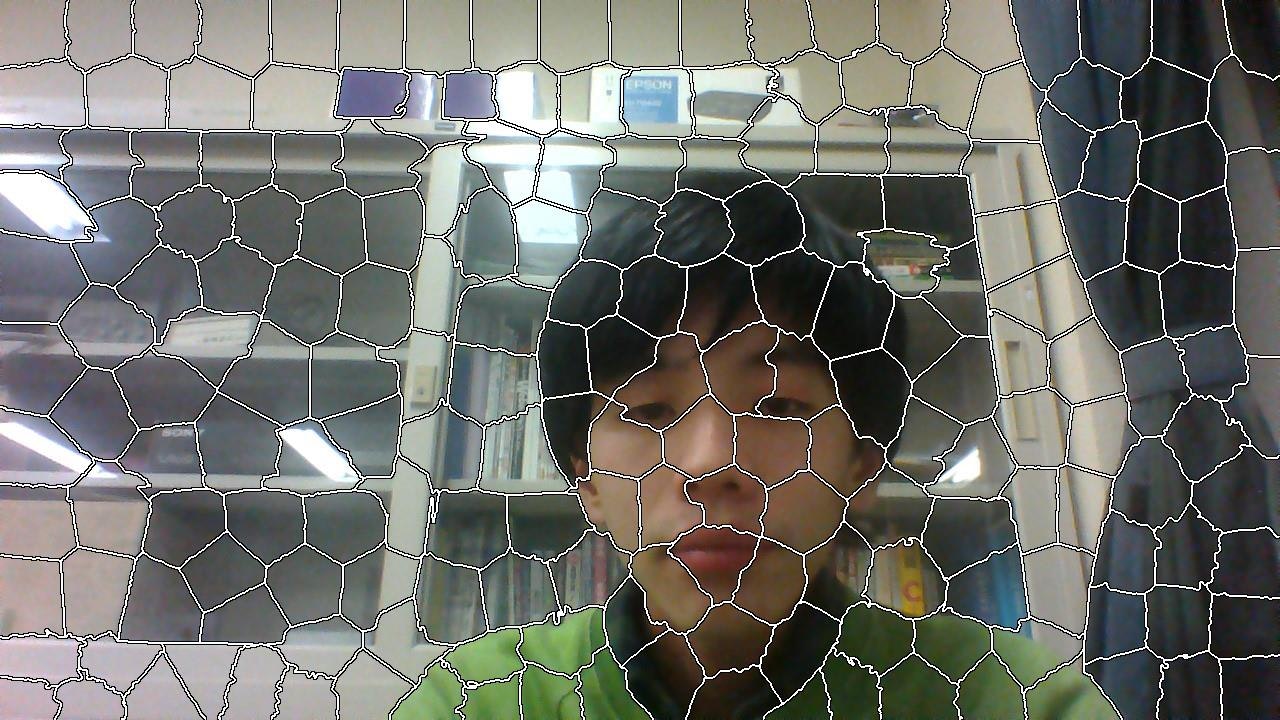
セグメンテーション
SLIC Superpixel (C++, OpenCV 2.4.x)
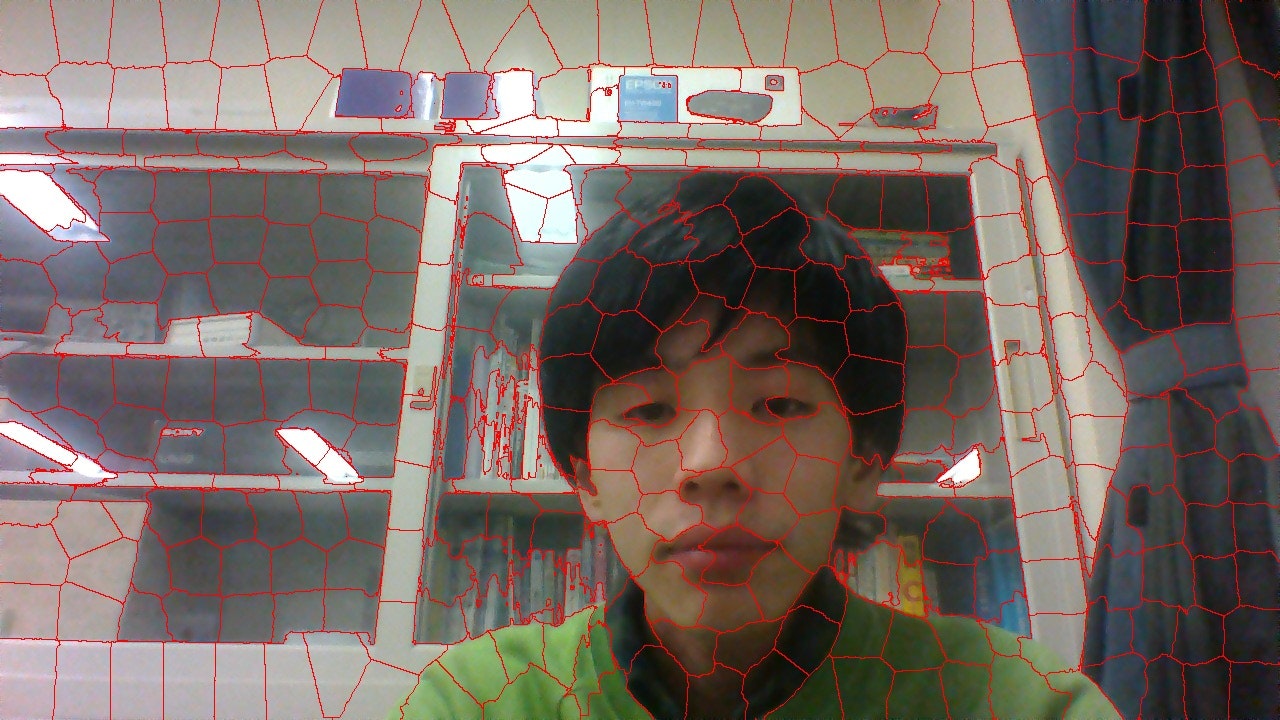
SLICO (C++)
ステレオ
rSGM (C++)

pgm画像をrSGM/runtime/image以下に置き、プロパティ→Debuggingの設定
..\runtime\images\000000_0.pgm ..\runtime\images\000000_1.pgm ..\runtime\images\disp.pgm 16 0
LIBELAS (C++)
SGBM (C++, OpenCV 2.4.x)
- ソースコード
- C:\opencv2410\sources\samples\cppの中にstereo_match.cppがあるので、それをプロジェクトにコピペ。
- 同様にtsukuba_l.png、 tsukuba_r.pngをプロジェクトの下にコピペ
- Debuggingの設定で引数を次のように指定
tsukuba_l.png tsukuba_r.png --algorithm=sgbm
