Raspberry Pi Picoの入出力ポートのまとめとして、スイッチ入力で、 マリオの1UP(ピコピコ音)と動き(サーボ動作)をつけました。
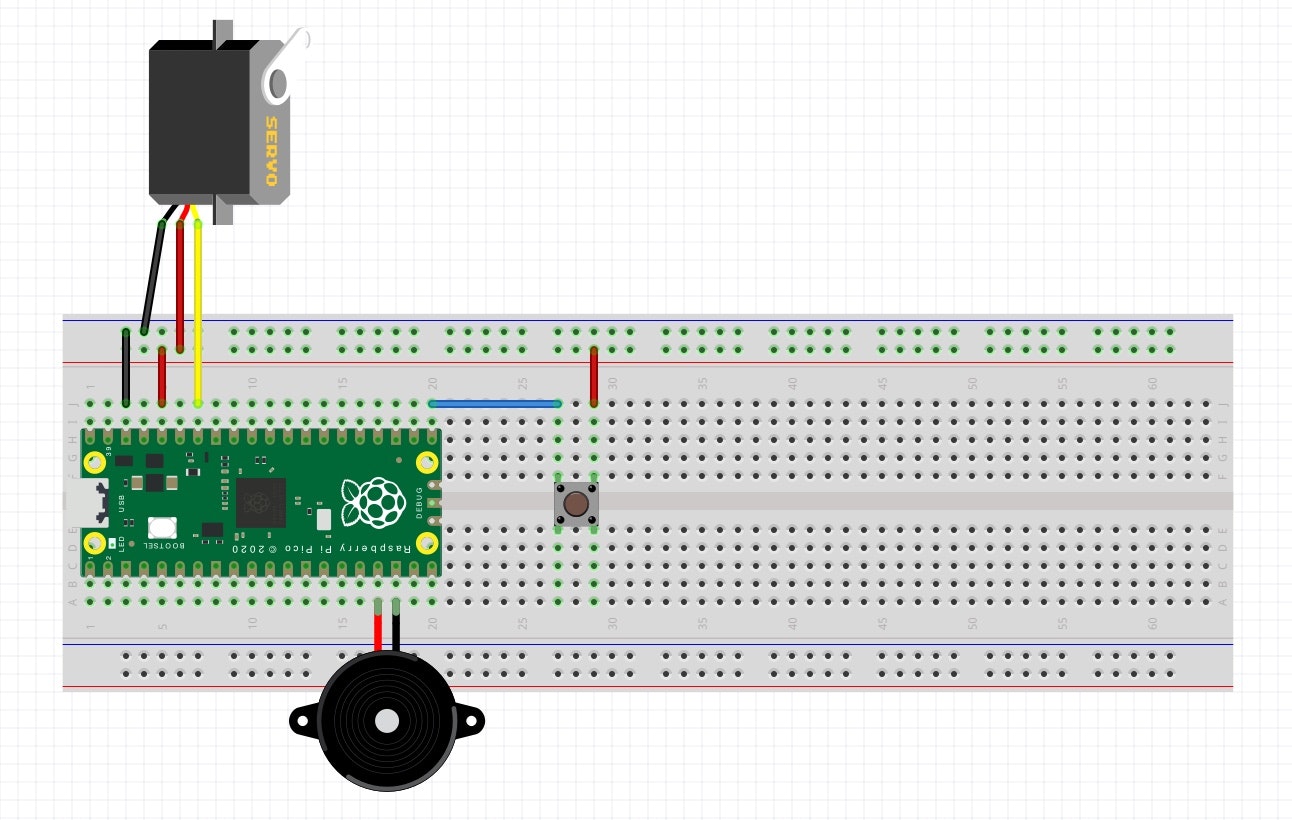
## 主要パーツ - Raspberry Pi Pico - サーボモータ - スイッチ - 圧電スピーカー - ブレッドボードRaspberry Pi Picoで Marioの1UP ピコピコ音#RaspberryPiPico https://t.co/MmXyawgQqV pic.twitter.com/N3XsvdZIs4
— Sam Akada@HomeKit (@sam_akada) February 11, 2021
接続図
ソースコード
import utime
from machine import Pin, PWM
B0 = 31
C1 = 33
CS1 = 35
D1 = 37
DS1 = 39
E1 = 41
F1 = 44
FS1 = 46
G1 = 49
GS1 = 52
A1 = 55
AS1 = 58
B1 = 62
C2 = 65
CS2 = 69
D2 = 73
DS2 = 78
E2 = 82
F2 = 87
FS2 = 93
G2 = 98
GS2 = 104
A2 = 110
AS2 = 117
B2 = 123
C3 = 131
CS3 = 139
D3 = 147
DS3 = 156
E3 = 165
F3 = 175
FS3 = 185
G3 = 196
GS3 = 208
A3 = 220
AS3 = 233
B3 = 247
C4 = 262
CS4 = 277
D4 = 294
DS4 = 311
E4 = 330
F4 = 349
FS4 = 370
G4 = 392
GS4 = 415
A4 = 440
AS4 = 466
B4 = 494
C5 = 523
CS5 = 554
D5 = 587
DS5 = 622
E5 = 659
F5 = 698
FS5 = 740
G5 = 784
GS5 = 831
A5 = 880
AS5 = 932
B5 = 988
C6 = 1047
CS6 = 1109
D6 = 1175
DS6 = 1245
E6 = 1319
F6 = 1397
FS6 = 1480
G6 = 1568
GS6 = 1661
A6 = 1760
AS6 = 1865
B6 = 1976
C7 = 2093
CS7 = 2217
D7 = 2349
DS7 = 2489
E7 = 2637
F7 = 2794
FS7 = 2960
G7 = 3136
GS7 = 3322
A7 = 3520
AS7 = 3729
B7 = 3951
C8 = 4186
CS8 = 4435
D8 = 4699
DS8 = 4978
def oneup():
global sound
effect = [E5, G5, F6, C6, D6, G6, 0]
for i in range(len(effect)):
if int(effect[i]) == 0:
sound.duty_u16(0)
else:
sound.freq(int(effect[i]))
sound.duty_u16(0x8000)
utime.sleep_ms(150)
def jump():
servo.freq(50)
servo.duty_u16(1500)
utime.sleep(0.2)
servo.duty_u16(3000)
utime.sleep(0.1)
oneup()
def mario():
global sound
melody = [E7, E7, 0, E7, 0, C7, E7, 0, G7, 0, 0, 0, G6, 0, 0, 0, C7, 0, 0, G6, 0, 0, E6, 0, 0, A6, 0, B6, 0, AS6, A6, 0, G6, E7, 0, G7, A7, 0, F7, G7, 0, E7, 0,C7, D7, B6, 0, 0, C7, 0, 0, G6, 0, 0, E6, 0, 0, A6, 0, B6, 0, AS6, A6, 0, G6, E7, 0, G7, A7, 0, F7, G7, 0, E7, 0,C7, D7, B6, 0, 0, 0, 0]
while True:
for i in range(len(melody)):
if melody[i] == 0:
sound.duty_u16(0)
else:
sound.freq(melody[i])
sound.duty_u16(0x8000)
utime.sleep_ms(150)
def button_handler(pin):
jump()
sound = PWM(Pin(13, Pin.OUT))
servo = PWM(Pin(28))
button = Pin(16, Pin.IN, Pin.PULL_DOWN)
button.irq(trigger=Pin.IRQ_RISING, handler=button_handler)
Mario()