ラズパイPicoでサーボモーターを動かす。
— Sam Akada@HomeKit (@sam_akada) February 5, 2021
PWMが16ビットだった pic.twitter.com/2DoQA0SSZs
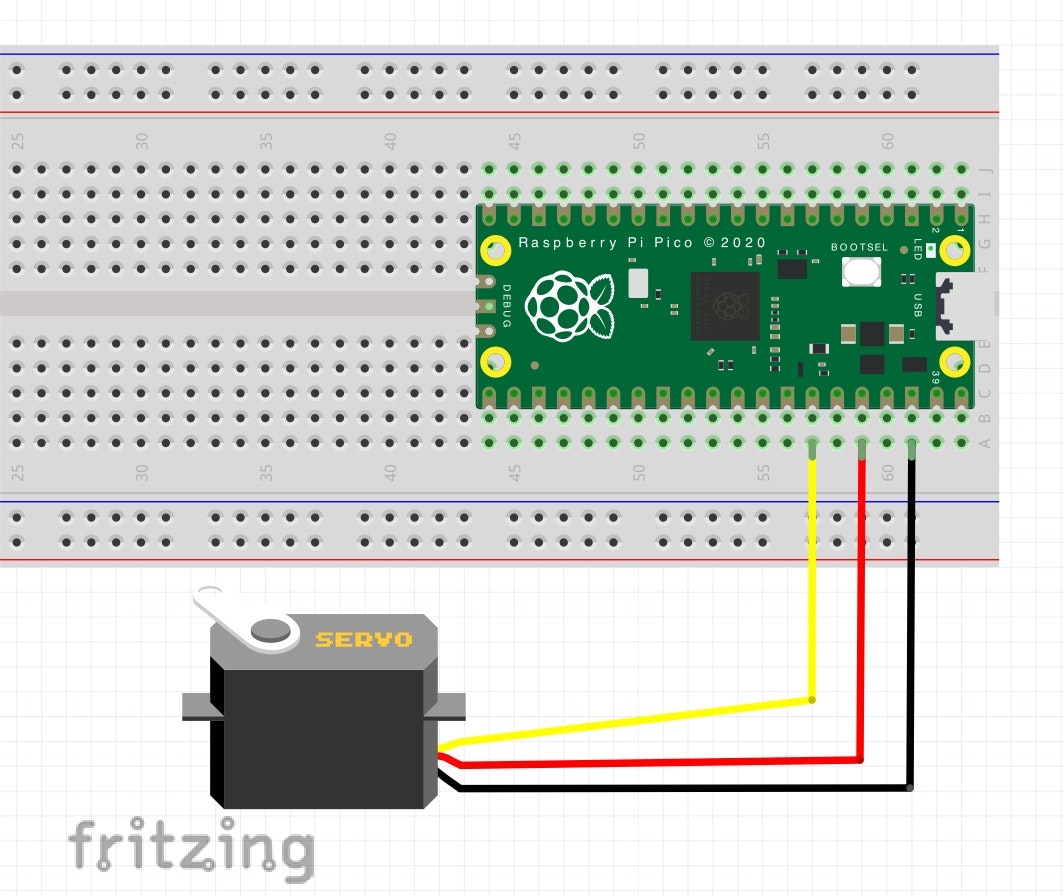
接続図
microPythonのソースコード
from machine import PWM, Pin
import time
servo1 = PWM(Pin(28))
servo1.freq(50)
while True:
servo1.duty_u16(1500)
time.sleep(1)
servo1.duty_u16(3000)
time.sleep(1)
参考
開発環境のセットアップは下記を参考にしてください。