本記事はROS 2 アドベントカレンダーの16日目の記事です。
はじめに
Qiita初投稿になります、nakajiと申します。
ROSは研究で使い始めて2年半くらいで、主にロボットアームを扱っています。
ROSを使っている皆さんは、Ubuntuで開発している人がほとんどだと思います。
ただ、ハードウェアやってるとWindowsのみ対応のソフトも多いので、
開発マシンはUbuntuだけどノートPCはWindowsという人も多いのではないでしょうか?
ノートPCでROSが使えると開発が捗りますね!
そこで、本記事ではWindowsでのROS環境構築について共有します。
本記事は環境構築の説明が長いので、説明不要な人向けに結論だけ書いておくと、
「Windows11のWSL2ではGUIが標準で使える(WSLg)ので、ROSの環境構築をするときに、Xサーバや仮想デスクトップ+VNCはもう不要」
です。
シミュレータだけでなく、ロボットアーム実機と接続して動かせることも確認しています。
追記
この記事を書いていて気付いたのですが、Windows11だけでなく、Windows10でもWSLgが使えるようになったそうです
ROS環境構築の種類
ROSの環境構築は大きく分けて2つの方法があるかと思います。
なお、この記事では②を扱います。
①直接インストールしてROS環境を構築する
以前は主流だったかと思いますが、個人的にはお勧めしない方法です。
ROSの環境は依存関係が複雑であり、同じコマンドで環境を作ってもPCの環境によって動作しないこともよくあります。
また、特にROS2は頻繁にアップデートされるのでいつの間にか動かなくなり、最初から環境構築やり直したいこともよくあります。
サクッと環境を作ってミスったら作り直す、そんな時は②の方法が便利です。
②仮想環境にROS環境を構築する
最近はこっちが主流になってきたかと思います。
仮想環境上にROS(と必要な周辺ソフトウェア)をインストールしていきます。
仮想環境にも色々あるのですが、WindowsだとWSL2+Dockerが便利かと思います。
Tiryohさんの記事が知られているのではないでしょうか。
Win10までは、僕もこちらの環境をベースに使っていました。
ただ、ちょっと気になっていた点として、仮想デスクトップ+VNCは動作が重たいです。
最近Win11に乗り換えた際に、仮想デスクトップがなくてもよいことに気が付きました。
そもそもなぜ仮想デスクトップを使っていたのかというと、WSL2では標準でGUIが表示できないからでした。
そのため、Windows上にXサーバを別途立ち上げて、WSLからXサーバに接続してGUI表示を行う、
もしくは先ほどの紹介のように仮想デスクトップを立ちあげてVNCでアクセスする、
といった方法が必要でした。
しかし、なんと、Windows11からはWSL2標準でGUIが使えるようになりました。
WSLgというシステムだそうです。
これで面倒な仕組みを使う必要がなくなっただけでなく、ネイティブのUbuntuとWSL2で同じ方法で環境構築ができるようになりました。
WindowsでのROS環境構築の例
参考までに、僕のROS環境構築例とメモ書きになります。
-
注意
- docker composeでdevやdisplayの環境を設定しておくと便利です。
- network_modeがhostなので、セキュリティを考慮しておらずあくまで開発用です。運用で使う際は注意してください。
-
コマンド
-
docker compose -p ${USER} -f compose.yaml buildでDockerイメージを作成できます。 -
docker compose -p ${USER} -f compose.yaml up -dでDockerコンテナを作成できます。 -
xhost +local:```でXサーバーへの接続許可を出してから、```docker exec -it ${CONTAINER_NAME} bash -iでDocker環境になかに入ってください。- ${CONTAINER_NAME}は下記のcompose.yamlの例だとROS1 noeticの場合
${USER}-ros-noetic-1、ROS2 humbleの場合${USER}-ros2-humble-1となります。
- ${CONTAINER_NAME}は下記のcompose.yamlの例だとROS1 noeticの場合
-
-
WSL2
- WSL2はROSのバージョンに応じて複数使い分けています。
- ROS1 noetic: WSL2 20.04
- ROS2 humble: WSL2 22.04
- WSL2はROSのバージョンに応じて複数使い分けています。
-
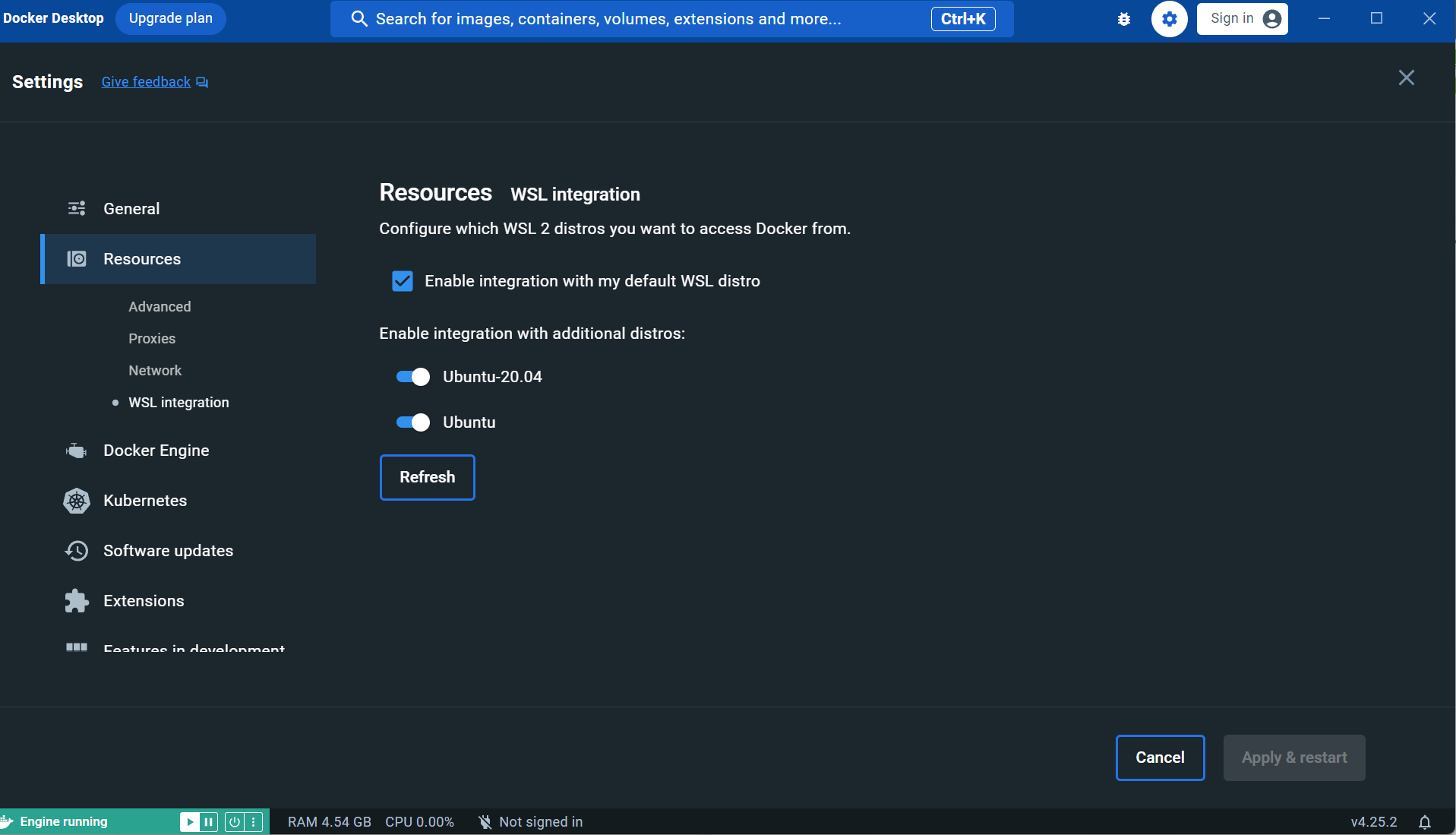
Docker Desktop
- Dockerを使っています。
- 設定でWSL2を有効にしておきます。
-
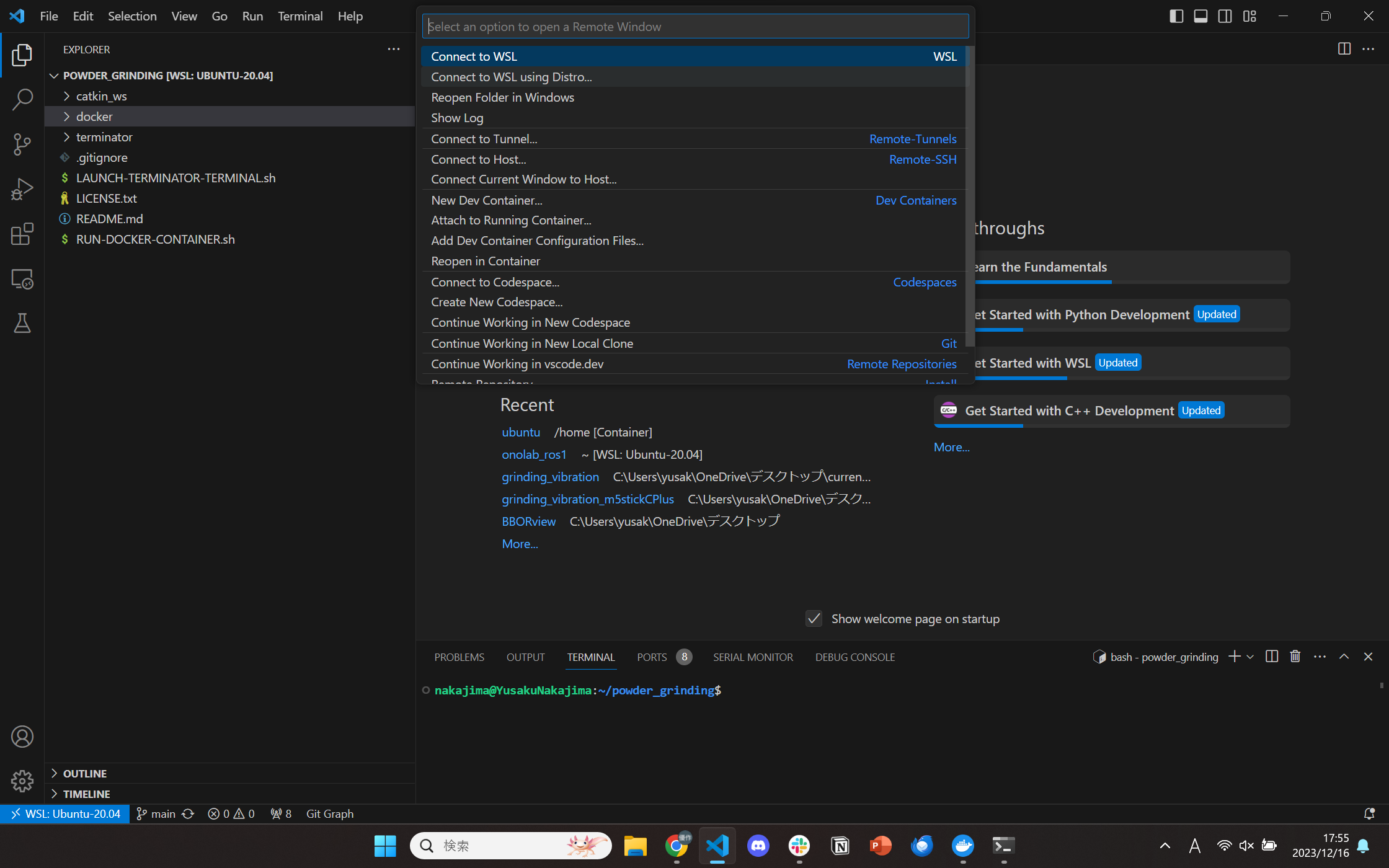
VSCode
- WSLの拡張機能を使って、WSL環境に接続できるので便利です。
- Dockerの環境に接続するにはRemote-Containersという拡張機能が便利です。
ROS1 noeticのDockerfile
FROM osrf/ros:noetic-desktop-full
LABEL maintainer="Nakajima<yusaku_nakajima@ap.eng.osaka-u.ac.jp>"
# Ignore keybourd layout seting
ENV DEBIAN_FRONTEND=noninteractive
# set timezone
RUN ln -sf /usr/share/zoneinfo/Asia/Tokyo /etc/localtime
RUN apt-get update \
&& apt-get install -y git tzdata
RUN date
# Install apt packages
RUN apt-get update && apt-get install -y \
git \
vim \
nano \
wget \
tmux \
curl \
terminator \
iputils-ping net-tools \
libglib2.0-0 \
libgl1-mesa-dev \
&& apt-get clean \
&& rm -rf /var/lib/apt/lists/*
# Install ROS packages
RUN apt-get update && apt-get install -y \
python3-pip \
python3-catkin-tools \
ros-noetic-joy ros-noetic-teleop-twist-joy \
ros-noetic-teleop-twist-keyboard ros-noetic-laser-proc \
ros-noetic-rgbd-launch ros-noetic-rosserial-arduino \
ros-noetic-rosserial-python ros-noetic-rosserial-client \
ros-noetic-rosserial-msgs ros-noetic-amcl ros-noetic-map-server \
ros-noetic-move-base ros-noetic-urdf ros-noetic-xacro \
ros-noetic-compressed-image-transport ros-noetic-rqt* ros-noetic-rviz \
ros-noetic-interactive-markers \
ros-noetic-dynamixel-sdk \
ros-noetic-realsense2-camera \
ros-noetic-realsense2-description \
&& apt-get clean \
&& rm -rf /var/lib/apt/lists/*
# Install vcstools
RUN apt-get update && apt-get install -y \
python3-vcstool \
&& apt-get clean \
&& rm -rf /var/lib/apt/lists/*
# Create ROS workspace
RUN echo "source /opt/ros/noetic/setup.bash" >> /root/.bashrc
RUN echo "source /home/ubuntu/onolab/catkin_ws/devel/setup.bash" >> /root/.bashrc
RUN echo "export ROS_MASTER_URI=http://localhost:11311" >> /root/.bashrc
RUN echo "export ROS_HOSTNAME=localhost" >> /root/.bashrc
ROS1 noeticのcompose.yaml
version: "3.8"
################################################################################
services:
ros-noetic:
hostname: test_ros_noetic
runtime: ${DOCKER_RUNTIME}
privileged: true
image: ros_noetic
environment:
# Pass host user information.
- HOST_USER=${USER}
- HOST_UID=1000
- HOST_GID=1000
# Display X Server GUI.
- DISPLAY
- QT_X11_NO_MITSHM=1
build:
context: .
dockerfile: ./Dockerfile
volumes:
# Map ROS workspace folders.
- ../:/home/ubuntu/ros/
# Grant display access to X Server.
- /tmp/.X11-unix:/tmp/.X11-unix
# Grant access to usb ports
- /dev/:/dev/
network_mode: "host"
extra_hosts:
- "host:127.0.0.1" # Seems that this might be needed for ROS networking
- "host:192.168.0.2" # The host PC
- "ur:192.168.0.3" # UR IP
expose:
- "50001" # send commnad to UR
- "50002" # external control of UR
- "50003" # recerve commnad from UR
- "50004" # script_command_port of UR
tty: true
ROS2 humbleのDockerfile
FROM osrf/ros:humble-desktop
LABEL maintainer="YusakuNakajima<yusaku_nakajima@ap.eng.osaka-u.ac.jp>"
# Ignore keybourd layout seting
ENV DEBIAN_FRONTEND=noninteractive
# set timezone
RUN ln -sf /usr/share/zoneinfo/Asia/Tokyo /etc/localtime
RUN apt-get update \
&& apt-get install -y git tzdata
RUN date
# Install apt packages
RUN apt-get update && apt-get install -y \
git \
vim \
nano \
wget \
tmux \
curl \
terminator \
iputils-ping \
net-tools \
python3-pip \
&& apt-get clean \
&& rm -rf /var/lib/apt/lists/*
# Install ROS packages
RUN apt-get update -q && \
apt-get install -y \
ros-humble-rmw-cyclonedds-cpp \
&& apt-get clean \
&& rm -rf /var/lib/apt/lists/*
# Setup ROS enviroments
RUN echo "source /opt/ros/humble/setup.bash" >> /root/.bashrc
RUN echo "source /home/ubuntu/onolab/onolab_ws/install/setup.bash" >> /root/.bashrc
# Argcomplete for colcon
RUN echo "source /usr/share/colcon_argcomplete/hook/colcon-argcomplete.bash" >> /root/.bashrc
ROS2 humbleのcompose.yaml
version: "3.8"
################################################################################
services:
ros2-humble:
hostname: test_ros2_humble
runtime: ${DOCKER_RUNTIME}
privileged: true
network_mode: host # Use host network(IP and ports).
extra_hosts:
- "host:192.168.0.2" # The host PC
- "ur:192.168.0.3" # UR IP
expose:
- "50001" # send commnad to UR
- "50002" # external control of UR
- "50003" # recerve commnad from UR
- "50004" # script_command_port of UR
environment:
# Pass host user information.
- HOST_USER=${USER}
- HOST_UID=1000
- HOST_GID=1000
# Display X Server GUI.
- DISPLAY
- QT_X11_NO_MITSHM=1
# Set ROS environment variables. It is instead of writing them in .bashrc.
- ROS_DOMAIN_ID=1
- ROS_VERSION=2
- ROS_PYTHON_VERSION=3
- ROS_DISTRO=humble
- ROS_LOCALHOST_ONLY=1
- RMW_IMPLEMENTATION=rmw_fastrtps_cpp
image: onolab_ros2_humble
build:
dockerfile: ./Dockerfile
volumes:
# Map ROS workspace folders.
- ../:/home/ubuntu/ros2/
# Grant display access to X Server.
- /tmp/.X11-unix:/tmp/.X11-unix
# Grant access to usb ports
- /dev/:/dev/
tty: true