概要
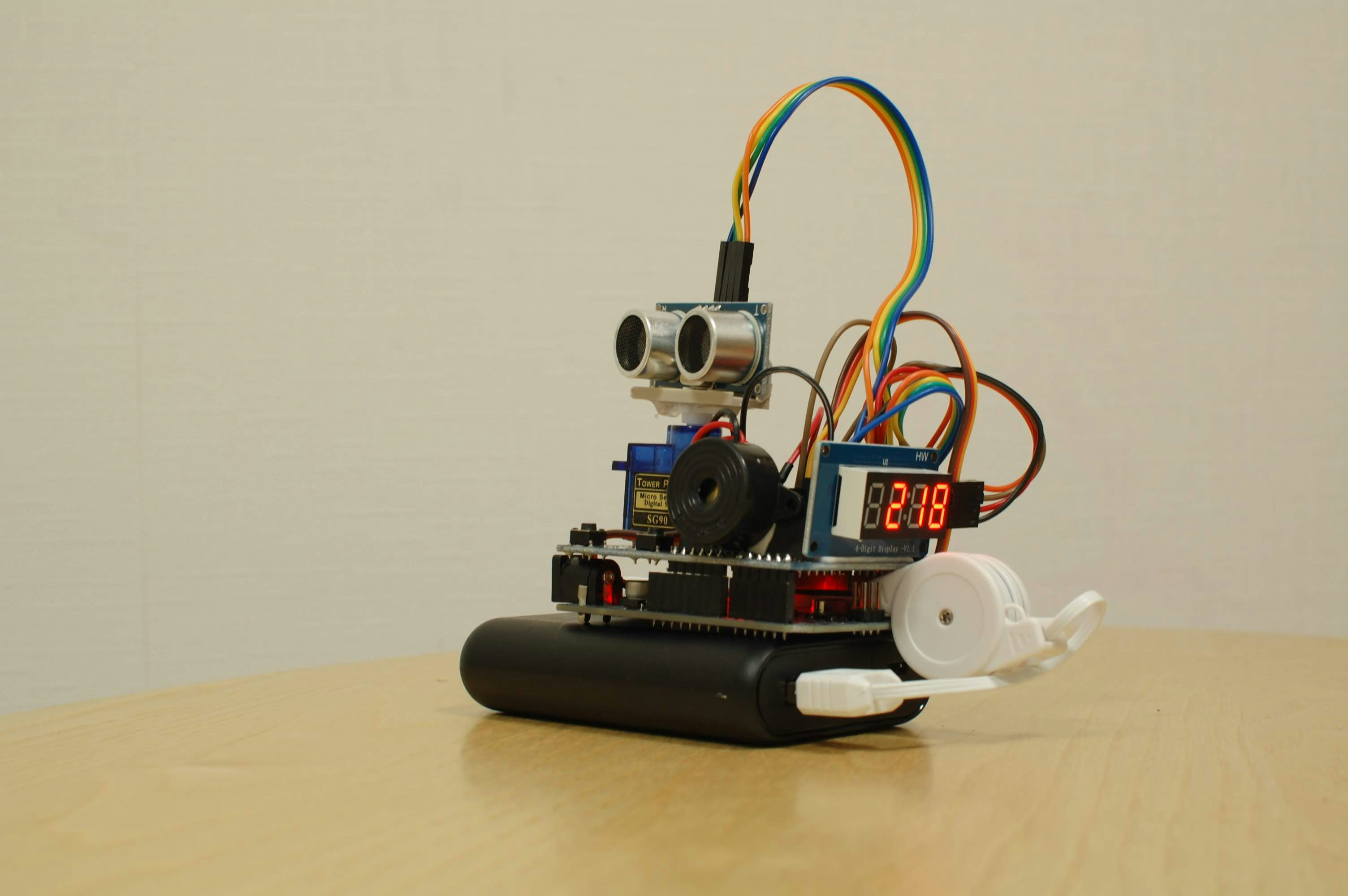
Arduinoでソナーを作成してみました。(超音波なのでレーダーではないです。)
本体側でも距離がわかるように、7セグメントLEDに距離を表示し、距離に応じてブザーを鳴らすようにしてみました。
必要なもの
- Arduino Uno(USBがMicroBのものを使用しました。)
- HC-SR04
- サーボ(SG92R)
- 7セグメントLED (TM1637)
- 圧電ブザー
- HC-06 Bluetooth Module
- プロトタイプシールド
- 2.54mmピンヘッダ(色付きが便利です)
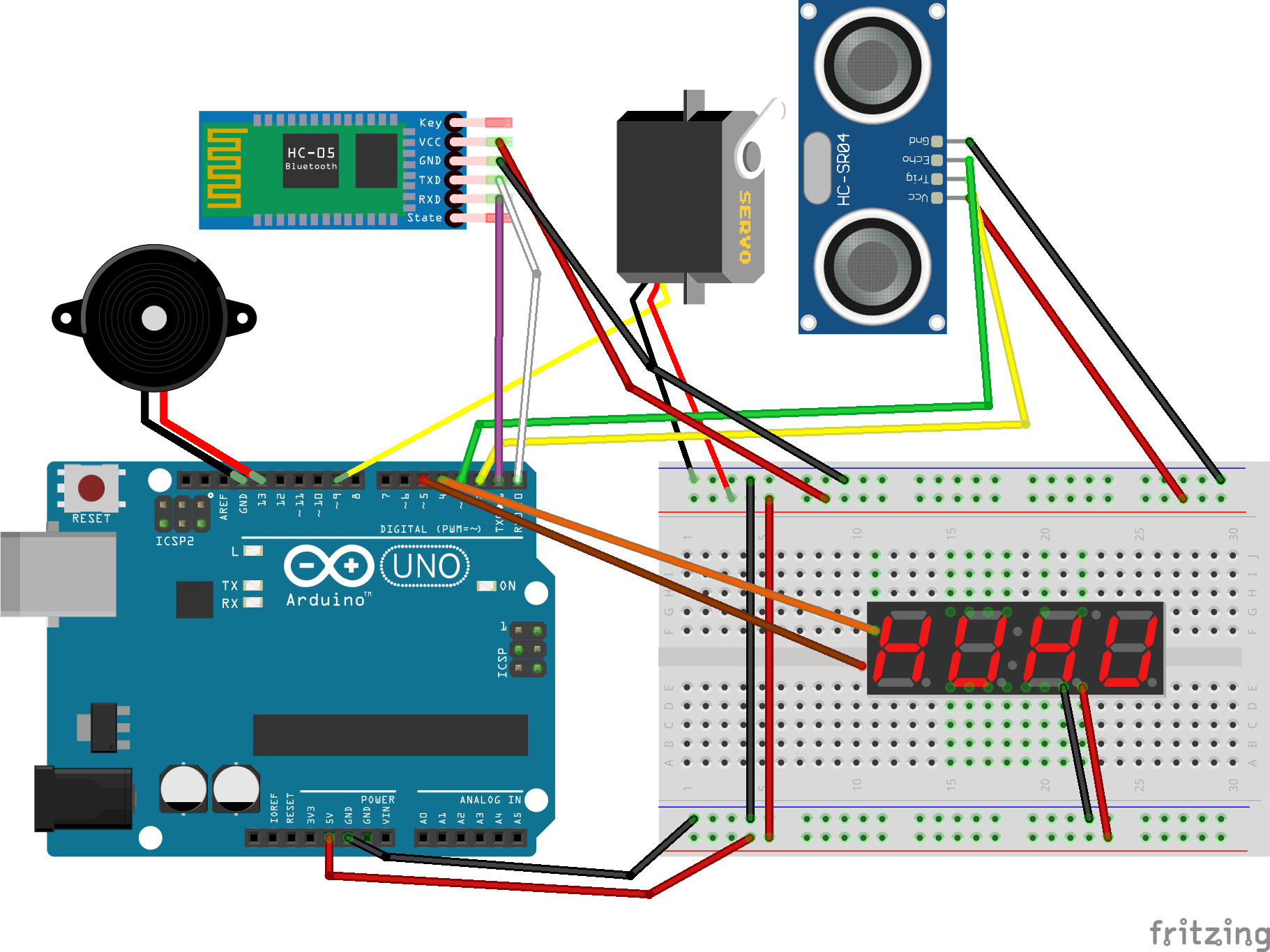
接続
以下のように接続します。
ソースコード
Arduinoスケッチ
超音波センサによる距離測定、サーボの駆動、7セグLEDの表示などを行っています。
ブザーの音程を、測定した距離の引き算で変化させています。
sonar.ino
# include<Servo.h>
# include <TM1637Display.h>
const int trigPin = 2;
const int echoPin = 3;
const int buzzer = 12;
const int BEATTIME = 100;
const int CLK = 4; //Orange
const int DIO = 5; //Brown
long duration;
int distance;
Servo servo;
TM1637Display display(CLK, DIO); //set up the 4-Digit Display.
void setup()
{
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
Serial.begin(9600);
servo.attach(9);
display.setBrightness(0x0a); //set the diplay to maximum brightness
}
void loop()
{
for(int i=15;i<=165;i++)
{
servo.write(i);
delay(250);
distance=calculateDistance();
if(distance > 450){
distance = 450;
}
display.showNumberDec(distance); //Display the distance value;
if(distance < 200){
tone(buzzer,(400-distance),BEATTIME);
}
Serial.println(String(i) + "," + String(distance));
}
for(int i=165;i>15;i--)
{
servo.write(i);
delay(250);
distance=calculateDistance();
if(distance > 450){
distance = 450;
}
display.showNumberDec(distance); //Display the distance value;
if(distance < 200){
tone(buzzer,(400-distance),BEATTIME);
}
Serial.println(String(i) + "," + String(distance));
}
}
int calculateDistance()
{
digitalWrite(trigPin,LOW);
delayMicroseconds(2);
digitalWrite(trigPin,HIGH);
delayMicroseconds(10);
digitalWrite(trigPin,LOW);
duration=pulseIn(echoPin,HIGH);
distance=duration*0.034/2;
return distance;
}
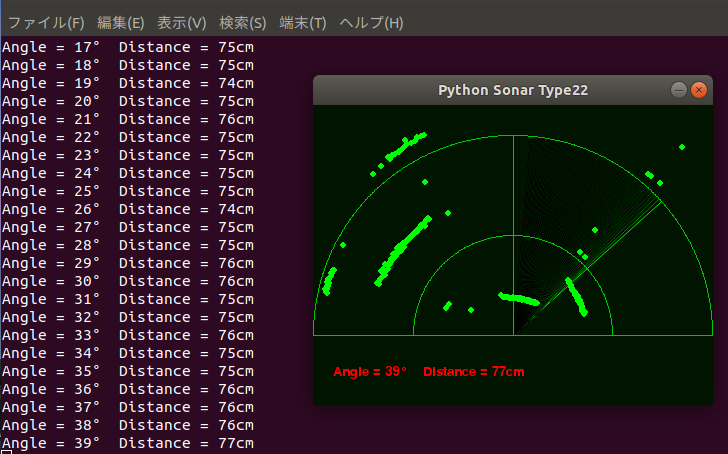
Pythonプログラム(ソナーの画面表示)
「技術雑記」に記載のソースを参考にさせていただきました。画面を半円にする、画面上の表示角度をサーボの角度に対応させる等の修正を行っています。
sonar.py
# -*- coding: utf-8 -*-
import sys
import pygame
import numpy as np
from pygame.locals import *
import serial
def main():
(w,h) = (400,300) # 画面サイズ
hight = 200
deg = 0 # 初期角度
x = [0]*700 # 障害物のx座標
y = [0]*700 # 障害物のy座標
pygame.init() # pygame初期化
pygame.display.set_mode((w, h), 0, 32) # 画面設定
pygame.display.set_caption("Python Sonar Type22")
screen = pygame.display.get_surface()
ser = serial.Serial('/dev/rfcomm4',9600,timeout=0.1)
font1 = pygame.font.SysFont(None, 20)
text1 = font1.render("Python Sonar type21", True, (255,0,0))
text2 = font1.render('', True, (255,0,0))
text3 = font1.render('', True, (255,0,0))
msg1=''
msg2=''
old_deg = 0
while (1):
data = ser.readline()
data = data.decode('utf-8')
data = data.replace('\n','')
try:
(deg, L) = data.split(",")
(deg, L) = (358-int(deg), int(L)) #センサーの角度のズレにあわせて調整
angle = 358 - deg
msg1 = "Angle = " + str(angle) +'°'
msg2 = 'Distance = ' + str(L) + 'cm'
print(msg1 + ' ' + msg2)
old_deg = deg
except ValueError:
(deg, L) = (old_deg, 500)
# レーダービームの軌跡描画
for i in range(1, 45):
dx = w/2 * np.cos(np.radians(deg-i)) + w/2
dy = (hight) * np.sin(np.radians(deg-i)) + (hight+30)
pygame.draw.aaline(screen, (0, 235/i+20, 0), (w/2, (hight+30)), (dx, dy),0)
# レーダー画面の目盛描画
pygame.draw.circle(screen, (0, 200, 0), (int(w/2), int(hight+30)), int(w/2), 1)
pygame.draw.circle(screen, (0, 200, 0), (int(w/2), int(hight+30)), int(w/4), 1)
pygame.draw.line(screen, (0, 200, 0), (int(w/2), 30), (int(w/2), int(hight+30)))
screen.fill((0,20,0), (0,230,400,100))
pygame.draw.line(screen, (0, 200, 0), (0, int(hight+30)), (w, int(hight+30)))
text2 = font1.render(str(msg1), True, (255,0,0))
text3 = font1.render(str(msg2), True, (255,0,0))
# 障害物の描画
x0 = int(L*np.cos(np.radians(deg))) + w/2
y0 = int(L*np.sin(np.radians(deg))) + (hight+30)
x.pop(699)
y.pop(699)
x.insert(0,x0)
y.insert(0,y0)
for i in range(1, len(x)):
pygame.draw.circle(screen, (0, 255, 0), (int(x[i]), int(y[i])), 3)
screen.blit(text2, (20,260))
screen.blit(text3, (110,260))
pygame.display.update() # 画面更新
screen.fill((0, 20, 0, 0)) # 画面の背景色
# イベント
for event in pygame.event.get():
if event.type == QUIT: # 閉じるボタンが押されたら終了
pygame.quit() # Pygameの終了(画面閉じられる)
sys.exit()
if __name__ == "__main__":
main()
スクリーンショット
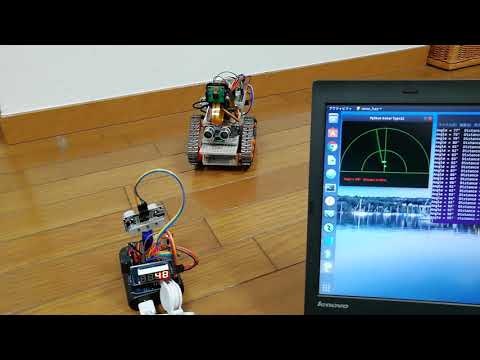
動作デモ
感想
- 三角関数がわかっていなかったので、この本で勉強しました。。。
- Bluetoothモジュールを使うと、プログラムの修正なしで無線接続できるのが楽です。
- 精度向上のために温度センサーを追加の予定です。
- 当初はブレッドボード上に組んでいましたが、プロトタイプシールドを使用することでコンパクトにできました。