SLAM(Jetson nano&ROS melodic)^^
Jetson nano&ROS melodicでSLAM動かしてみました!!!
壊れたとき用のメモです。。。3回壊してます。。。。^^!!!!!!
SLAMとは
SLAM(スラム)とは、自己位置推定と環境地図作成を同時に行うことを言う。
正式名称は、Simultaneous Localization and Mapping。
https://ja.wikipedia.org/wiki/SLAM
動かし方
主にSLAMは@protocol1964 さんの記事を参考にしています。こちらからどうぞ!!!
ROS MelodicでTurtlebot3をGazeboで動かしてついでにSLAMする
私はただただJetson nanoでしてるだけです^^
ROSインストール
こちらにまとめております。
Jetson nano ROS(Melodic)インストール〜Gazeboまで
パッケージ
sudo apt-get install ros-melodic-joy ros-melodic-teleop-twist-joy ros-melodic-teleop-twist-keyboard ros-melodic-laser-proc ros-melodic-rgbd-launch ros-melodic-depthimage-to-laserscan ros-melodic-rosserial-arduino ros-melodic-rosserial-python ros-melodic-rosserial-server ros-melodic-rosserial-client ros-melodic-rosserial-msgs ros-melodic-amcl ros-melodic-map-server ros-melodic-move-base ros-melodic-urdf ros-melodic-xacro ros-melodic-compressed-image-transport ros-melodic-rqt-image-view ros-melodic-navigation'
環境構築
ワークスペース
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/src
$ catkin_init_workspace
$ cd ~/catkin_ws
クローン。。。昔、リボーンみてた。
$ cd ~/catkin_ws/src
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3.git
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3_msgs.git
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git
$ git clone https://github.com/ROBOTIS-GIT/turtlebot3_gazebo_plugin.git
最後はビルド!
$ cd ~/catkin_ws
$ catkin_make
$ source ~/catkin_ws/devel/setup.bash
Rviz
$ export TURTLEBOT3_MODEL=burger
$ roslaunch turtlebot3_fake turtlebot3_fake.launch
$ roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
【Jetson nano&ROS Turtlebot3】
— MeRT(ルット)@社会人博士奮闘中 (@MeRTcooking) October 27, 2019
かわいい!!! pic.twitter.com/OwhZaGiidE
Gazebo
$ roslaunch turtlebot3_gazebo turtlebot3_world.launch
【Jetson nano&Gazebo】
— MeRT(ルット)@社会人博士奮闘中 (@MeRTcooking) October 28, 2019
Hello Gazebo! pic.twitter.com/fIswPCcYBQ
これでたら
terminate called after throwing an instance of 'std::runtime_error'
what(): locale::facet::_S_create_c_locale name not valid
これ
$ export LC_ALL=C; unset LANGUAGE
gmapping
クローン。今回は真面目に。
$ cd ~/catkin_ws/src
$ git clone https://github.com/ros-perception/slam_gmapping.git
$ git clone https://github.com/ros-perception/openslam_gmapping.git
$ git clone https://github.com/ros-planning/navigation_msgs.git
$ git clone https://github.com/ros-planning/navigation.git
$ git clone https://github.com/ros/geometry2.git
ビルド
$ cd ~/catkin_ws
$ catkin_make
$ source ~/catkin_ws/devel/setup.bash
いざ、動作確認へ!
Gazeboとteleopコントローラ
ターミナル1
cd ~/catkin_ws
source ~/catkin_ws/devel/setup.bash
export TURTLEBOT3_MODEL=burger
roslaunch turtlebot3_gazebo turtlebot3_world.launch
ターミナル2
cd ~/catkin_ws
source ~/catkin_ws/devel/setup.bash
export TURTLEBOT3_MODEL=burger
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
ターミナル3
gmapping
cd ~/catkin_ws
source ~/catkin_ws/devel/setup.bash
export TURTLEBOT3_MODEL=burger
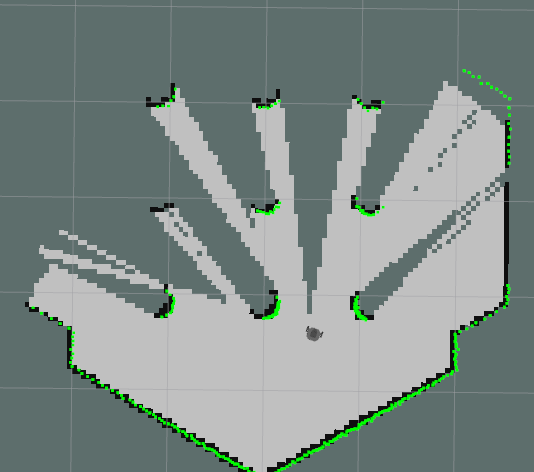
roslaunch turtlebot3_slam turtlebot3_slam.launch slam_methods:=gmapping
よいしょーーーーー!!!!!!
5V2Aでもなんとか、、、
CPU・メモリ
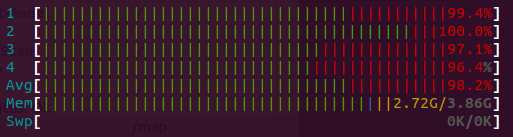
あらま。。。ご参考までに。。。
参考文献
ROS MelodicでTurtlebot3をGazeboで動かしてついでにSLAMする
これはMeRT(ルット)。
Jetson nano ROS(Melodic)インストール〜Gazeboまで