myCobot Moveit編
さあいきまっしょう!今回もmyCobot特集です。
前回はこちら。
【6軸ロボットアーム】myCobot動かし方①(ロボット到着〜ROSで動かすまで)
今回の内容は・・・Moveit!
●Moveit
Moveit!とはIK(逆運動学)や軌道計画の等のタスクを簡単に実現できるライブラリです。
実際に使うと以下のようなことができます。
きたああああ!!!!!
— MeRT(ルット)@ロボ🐨 (@MeRTcooking) February 1, 2021
ひょっこりロボットアームさん🐒
行き先指定したら自動で動きます👀#mert_mycobot #MeRTの進捗進捗 pic.twitter.com/qdh1cmJDE4
だーだん🦈・・・・・・・・・・・・・・・・・#mert_mycobot #MeRTの進捗進捗 pic.twitter.com/tQJn5CluEh
— MeRT(ルット)@ロボ🐨 (@MeRTcooking) February 4, 2021
●とりあえず説明よりもコード見せろと言う方はこちらへ。
myCobot moveitで動かすコードです!
— MeRT(ルット)@ロボ🐨 (@MeRTcooking) February 4, 2021
勉強がてら作成してみました^^
PR待ってます!#mert_mycobot #MeRTの進捗進捗https://t.co/5Nb3oq0F7V
自宅でロボットアームが動くのは面白いですね!!!!
実装
なんちゃってros controlを実装しました。
Hardware InterfacesとControllersあたりを理解する必要がありました。
詳細はこちらへ↓
http://wiki.ros.org/ja/ros_control
使い方
準備
以下2つをclone or forkしてください。 PRもあると嬉しいです!!!!!
・mycobot_ros
・mycobot_controller
cd your_ws/src
git clone https://github.com/mertcookimg/mycobot_ros.git
git clone https://github.com/mertcookimg/mycobot_controller.git
catkin build
Moveit使い方
USBケーブルつないで以下を実行してください。
sudo chmod 666 /dev/ttyUSB0
roslaunch mycobot_controller demo_mycobot.launch
以下の写真のようなロボットが現れると思います。
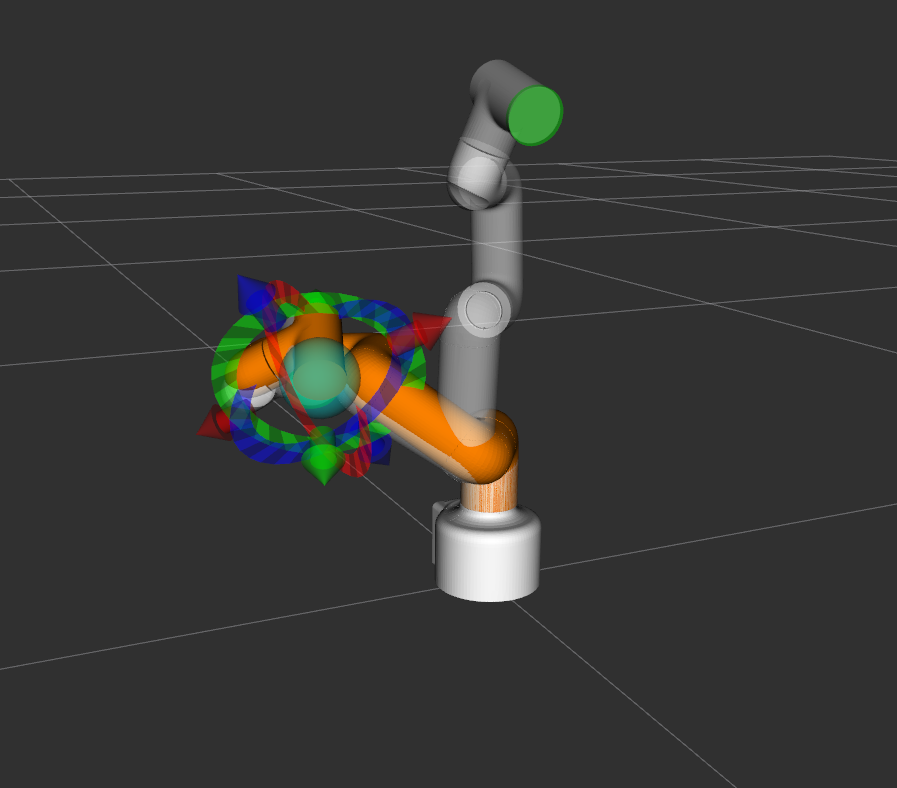
だーだん🦈・・・・・・・・・・・・・・・・・#mert_mycobot #MeRTの進捗進捗 pic.twitter.com/tQJn5CluEh
— MeRT(ルット)@ロボ🐨 (@MeRTcooking) February 4, 2021
参考サイト
参考になりすぎました!
mycobot moveit対応されてる!
— MeRT(ルット)@ロボ🐨 (@MeRTcooking) January 31, 2021
参考になるなる。https://t.co/oD5i0uHDmv
nisshan にっしゃんさん
①https://qiita.com/nisshan_/items/de06464dbac84408d188
②https://qiita.com/nisshan_/items/304cc8e1a2da7c2bebad
③https://github.com/nisshan-x/mycobot_moveit
次はハンドとかかも。。。