マウス操作でTwistを送るプラグインを作ります
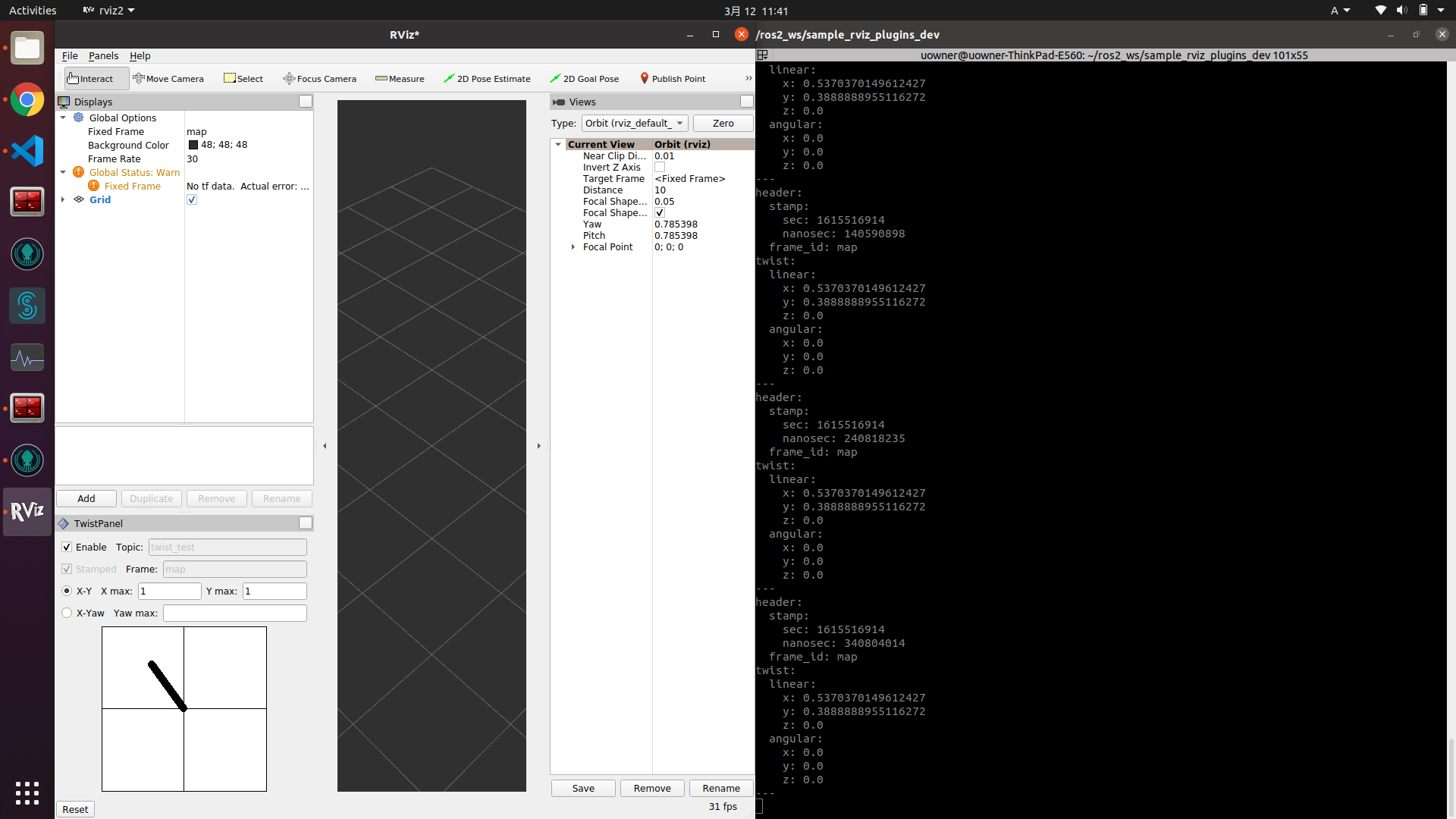
実行例
ROS1版
こちらのコードをrviz2用に書き直します
ROS講座74 twistを送るrviz panel pluginを作る
主な変更点
twist_panel.hpp
onInitialize() を追加
.hpp
public:
TwistPanel(QWidget *parent = nullptr);
virtual void onInitialize(); // 追加
virtual void load(const rviz_common::Config &config);
virtual void save(rviz_common::Config config) const;
NodeHanlde が存在しないのでNodeに書き換えます
Publisherはtemplateを持たせ得る必要があるので2つ宣言します
.hpp
protected:
// The ROS node handle.
// ros::NodeHandle nh_;
rclcpp::Node::SharedPtr nh_;
// The ROS publisher for the command velocity.
// ros::Publisher twist_publisher_;
rclcpp::Publisher<geometry_msgs::msg::Twist>::SharedPtr twist_publisher_;
rclcpp::Publisher<geometry_msgs::msg::TwistStamped>::SharedPtr twist_stamped_publisher_;
twist_panel.cpp
Node を作成するためにおまじないのようなものを書いています。
今回はコメントアウトしてるコードでもいいんですが、コメントアウトしてるコードを使うとPublisherは動作するんですけどSubscriptionとServiceが動作しなかったのでおまじないを使います。(詳しい方いたら教えていただけるとありがたいです)
.cpp
void TwistPanel::onInitialize()
{
nh_ = this->getDisplayContext()->getRosNodeAbstraction().lock()->get_raw_node();
// nh_ = std::make_shared<rclcpp::Node>("twist_panel", "sample_rviz_plugin");
}
.cpp
if (twist_publisher_ || twist_stamped_publisher_) //
{
float vel_max1 = max1_edit_->text().toFloat();
float vel_max2 = max2_edit_->text().toFloat();
float vel_max3 = max3_edit_->text().toFloat();
auto msg = std::make_shared<geometry_msgs::msg::TwistStamped>(); //
msg->header.frame_id = pub_frame_;
// msg->header.stamp = ros::Time::now();
msg->header.stamp = nh_->now(); //
.cpp
// twist_publisher_ = nh_.advertise<geometry_msgs::TwistStamped>(topic_name, 10);
twist_stamped_publisher_ = nh_->create_publisher<geometry_msgs::msg::TwistStamped>(topic_name, rclcpp::QoS(10));