最初に結論
- RaspberryPi 5でrpi_hardware_pwmなるモジュールを実行してみた
- 実行はできて、サーボモータのジッターが見えなくなったことを確認
- /sys/kernel/debug/pwmにもちゃんと設定が反映されていたことを確認
rpi_hardware_pwmについて
以下参照。
軽量なハードウェアPWMが使えるモジュール。
ラズパイ5以外にも4などでも使用可能。
環境
- RaspberryPi 5 8GB
- RaspberryPi OS 12(Bookworm) x64
- CLIしか使わなかったけどwith desktopの方
- rpi-hardware-pwmは0.3.0が入った
- サーボモーターはGeekServo Gray
実施したこと
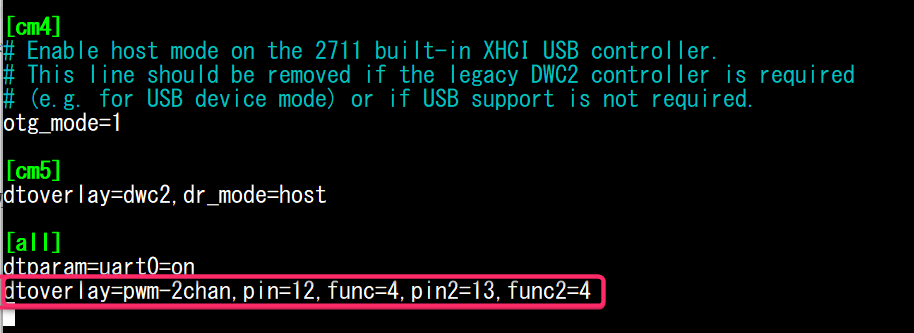
事前にsudo nano /boot/hardware/config.txtなどで下記の文言を[all]の欄に追加
今回はpin12とpin13を使う設定にした。
dtoverlay=pwm-2chan,pin=12,func=4,pin2=13,func2=4
externally-managed-environmentのエラーが出たので、以下の強制力強めのコマンドを実行。嫌であれば仮想環境上のPythonで実行するのが良いのかな。
sudo pip install --break-system-packages rpi-hardware-pwm
以下のコードを作成し、実行
Ctrl+Xで止めるまで一定の角度への移動を5秒おきに繰り返す処理を実行しており、待機時間にジッターが起きないか確認
ちなみにPWMピンはGPIO12へ接続
pwm_test.py
rom rpi_hardware_pwm import HardwarePWM
import time
pwm = HardwarePWM(pwm_channel=0, hz=50, chip=0)
pwm.start(0)
try:
while True:
# 0度
pwm.change_duty_cycle(2.5)
time.sleep(5)
# 90度
pwm.change_duty_cycle(7.5)
time.sleep(5)
# 180度
pwm.change_duty_cycle(12.5)
time.sleep(5)
except KeyboardInterrupt:
print("プログラムを終了します")
finally:
実行コマンドは下記
python pwm_test.py
実行結果
ジッターなどはなく、きれいに移動している。
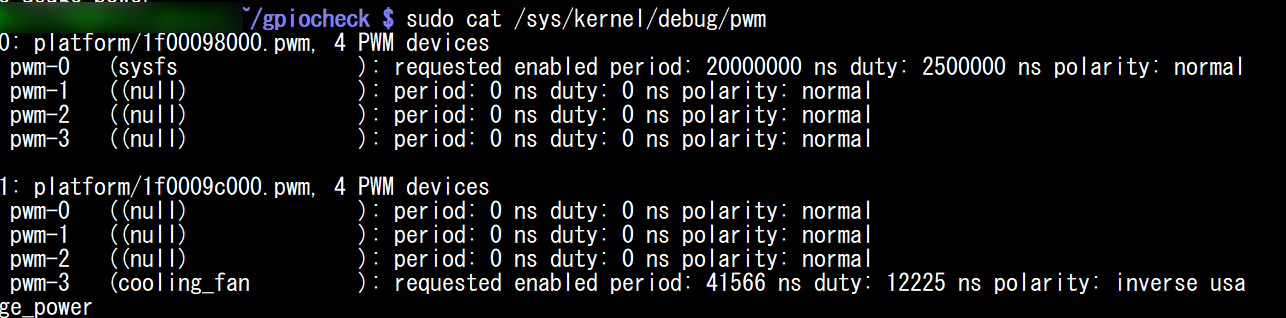
以下コマンドにてハードウェアPWMとして設定が反映されていることも確認。ちなみにlsmod | grep pwmだと何も出てこなかった。謎だ~
sudo cat /sys/kernel/debug/pwm
まとめ
- ハードウェアPWMがやっとラズパイ5で使えた!
- ジッターが無いのはやっぱり嬉しい!
- lsmodで
pwm-...が出てこなかったのでむっちゃ焦った -
externally-managed-environmentが出ないクリーンな環境も作ってみたいところ
参考文献
実を言うとこちらの記事の内容をRaspberryPi5で試してみただけだったり。感謝です。
特に最後のilw氏のOther useful commandsに救われた。ありがとうございます。