Motor Driver Board for BBC microbit Kitronik 5620
この拡張ボードを使って、DCモータの制御を行います。
このHPを参考にしました。
micro:bitでモーターを動かしてみた
micro:bitでタミヤのキャタピラー車を無線制御してみた
Microbitをこのボードにさすときは、向きに注意してください。(Microbitの0端子が、P0ピン。)
DCモーター制御のピントとデジタル出力との関係
| P8 | P12 | Motor1 Function |
|---|---|---|
| 0 | 0 | 惰性 |
| 1 | 0 | 前進 |
| 0 | 1 | 後進 |
| 1 | 1 | ブレーキ |
| P0 | P16 | Motor2 Function |
|---|---|---|
| 0 | 0 | 惰性 |
| 1 | 0 | 前進 |
| 0 | 1 | 後進 |
| 1 | 1 | ブレーキ |
動作確認テスト
以下のようなプログラムを作成

Aボタンを押すとMotor1が前進方向に回転、Bボタンを押すとMotor1が前進方向に回転
ABを押すと1,2ともに後進方向へ回転。
このプログラムは停止するものがないため、電源を落として止めてください。(電池ボックスの電源を切る)

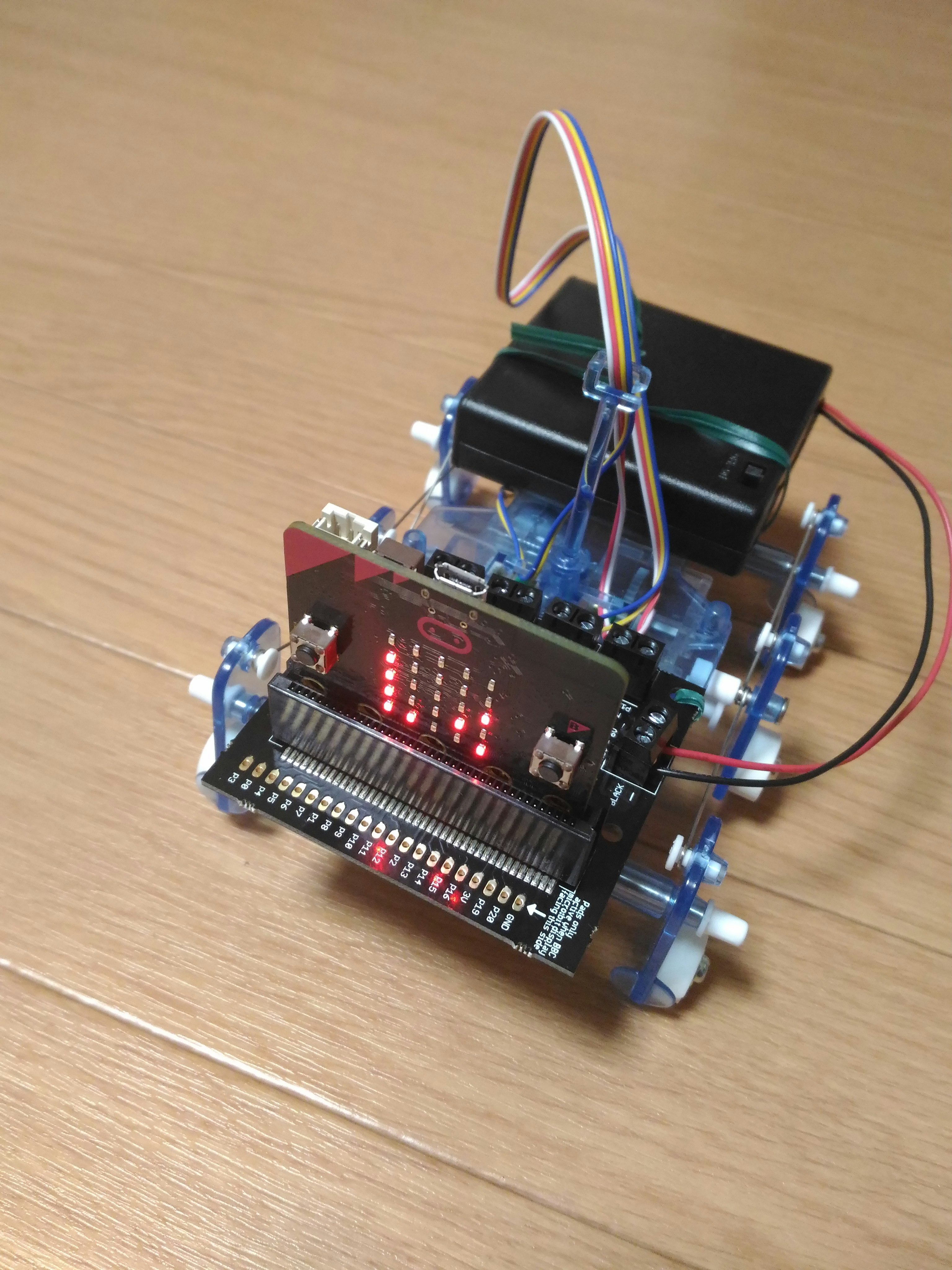
タミヤ 2チャンネル リモコン・インセクト (6足歩行タイプ)にDCモーター制御を搭載しました。
無線でコントロール
6足歩行ロボットを無線で制御するために、受信用(DCドライバー側)と送信用プログラムを作成
送信側プログラム
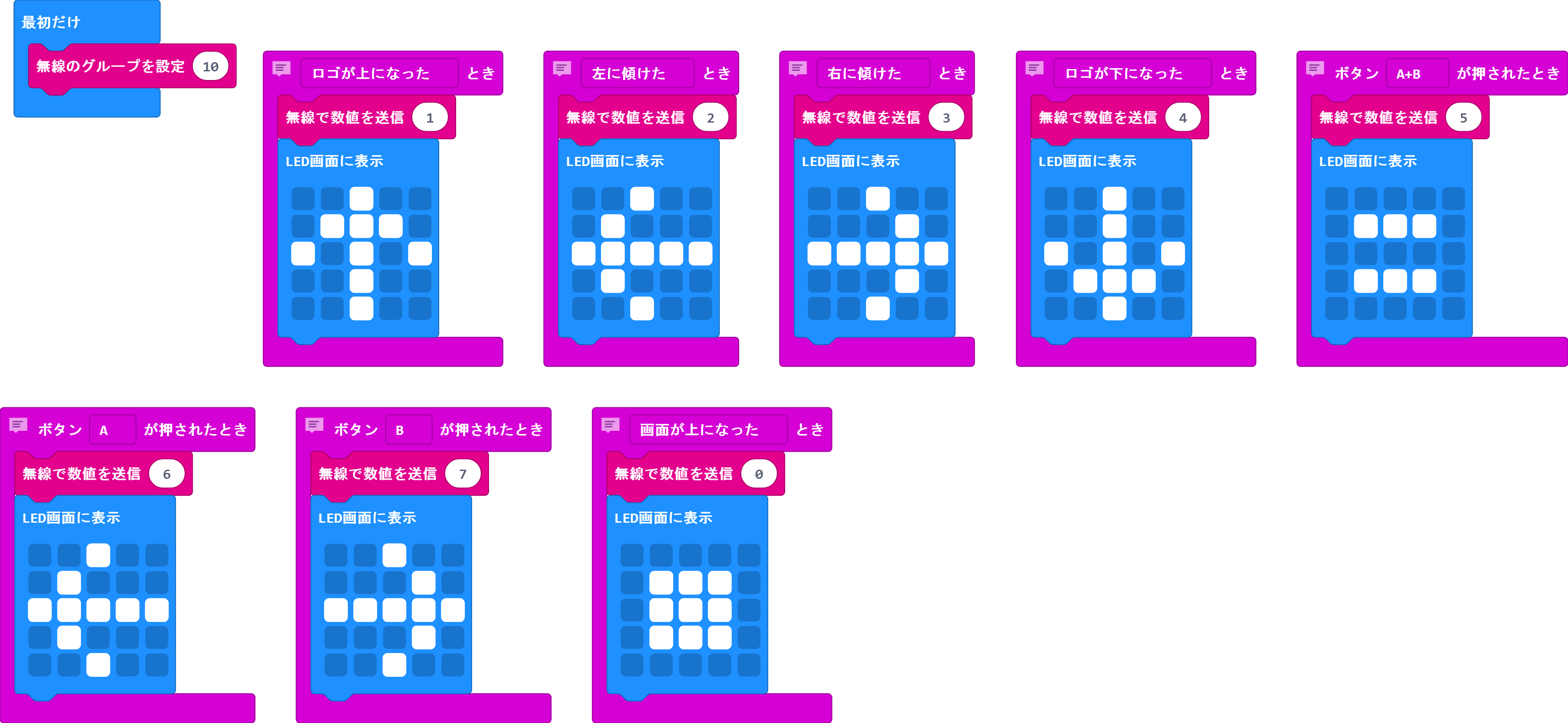
ABボタンを基本使わず、Microbitの傾きでコントロールしています。
受信側プログラム

右、左、前進などの動作の関数を作ります。送信側の送信番号に合わせて関数を配置します。
Microbitは上から実行しますので、動作の関数を上に配置して、そのあとに無線で受信した時のブロックを配置します。
実際の搭載例

自分がコントロールしやすいように、送信側の命令を変えてみると面白いかもしれません。