はじめに
前に書いた**「obnized M5StickC 回転Servoで2WD Car」**の進化系です。半田付けなしで作れるような構成に改良しました。

■動画
# ■接続図 下記の部品を使います ・5cm程度のGROVEケーブル。 ・両端ロングのピンヘッダ、3ピン×2個。 ### 半田付け不要で、だだ挿すだけです。 ### GROVE端子とピンヘッダはピッチが異なるのですが、慎重かつ強引に差し込めば何とかなります。なんならGROVEケーブルなしで、Servo端子を直接M5StickCのGROVE端子に刺せない事もないのですが、ヤバイのでお勧めはしません。でもやればできます。 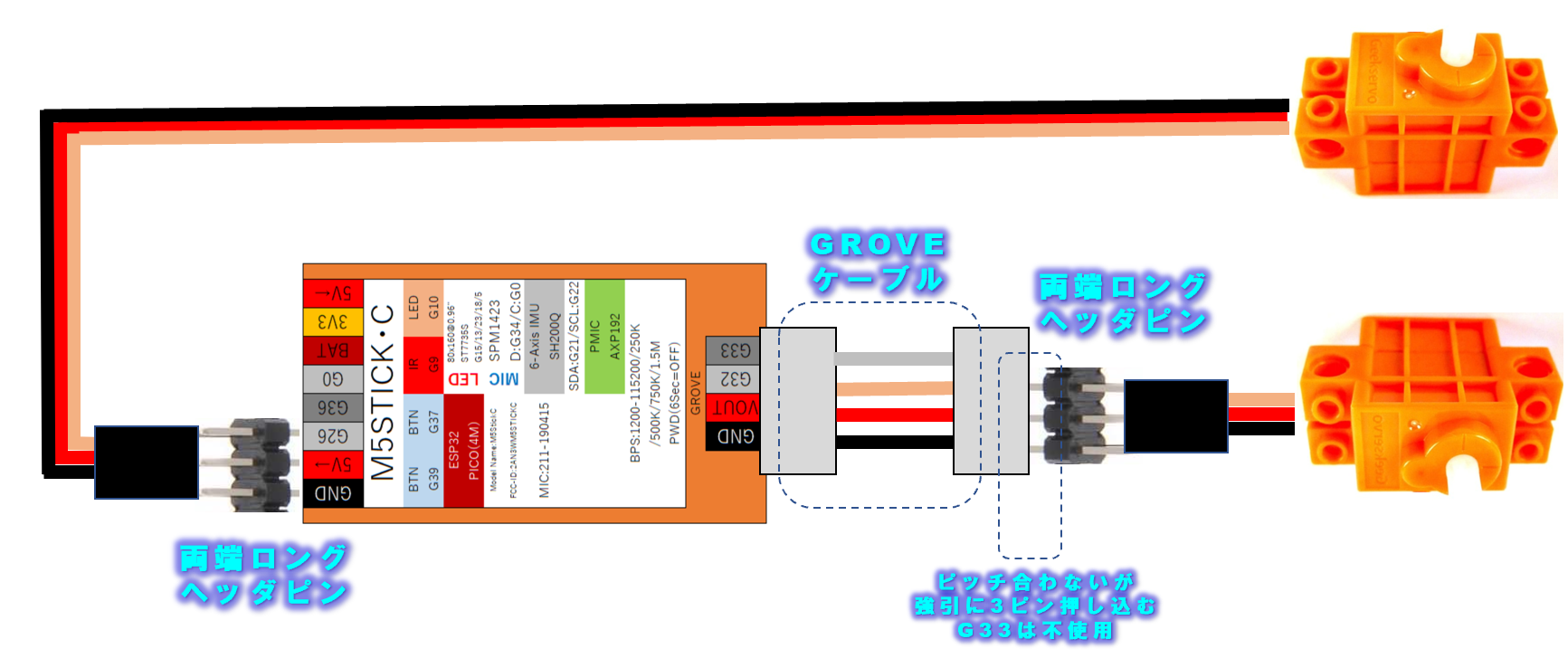#obnizOS #obniz
— Google Homer (@google_homer_) February 11, 2020
obnized #M5StickC 回転Servo 2WD Carの半田レス版できた。Servo2台ほぼ直刺し。Qiita投稿準備中。 pic.twitter.com/jXqEPni8J1
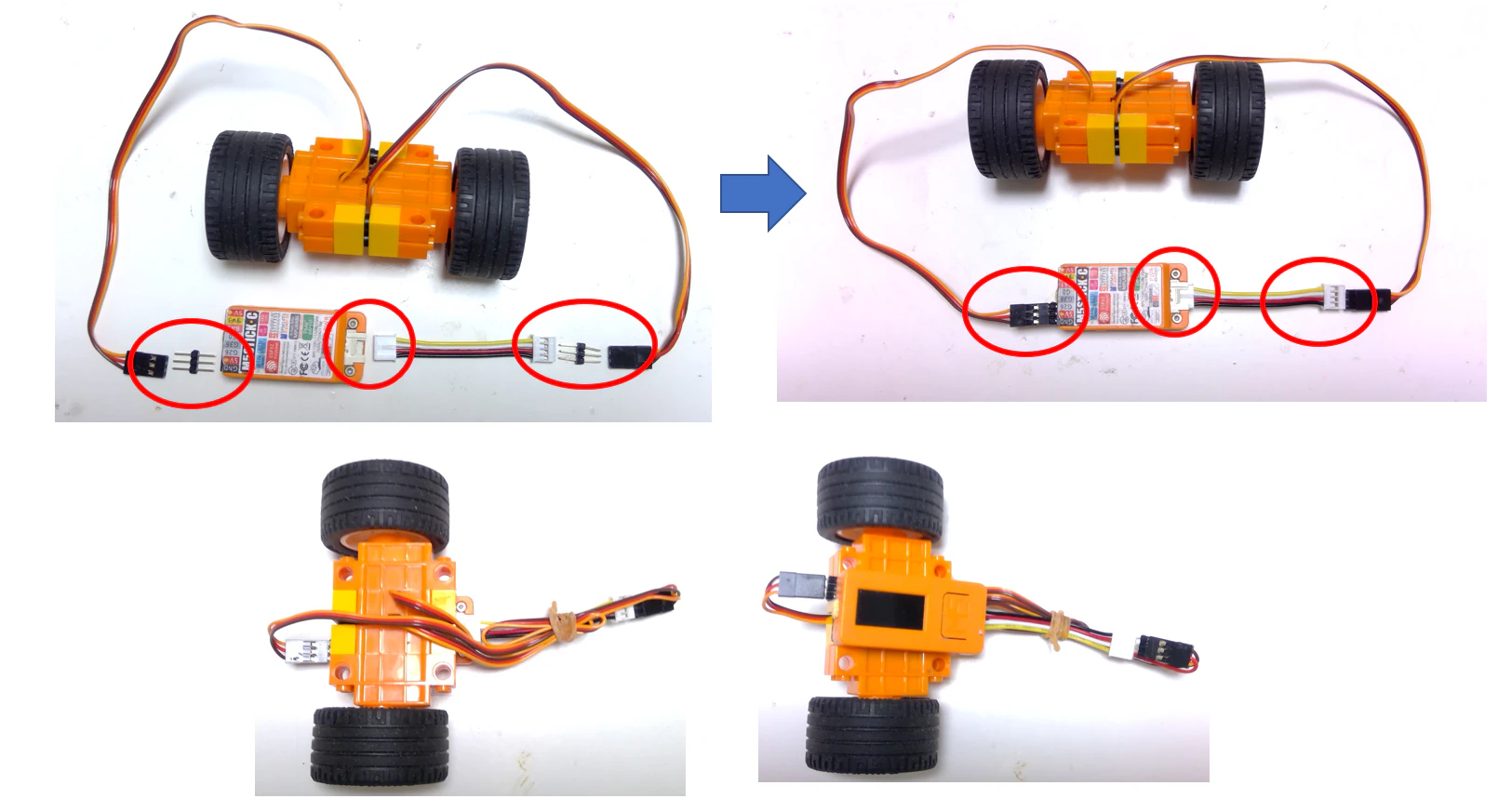
■車体(参考)
LEGOブロック等で適当に組み上げます。
■サンプルコード
<html>
<head>
<meta charset="utf-8">
<link rel="stylesheet" href="https://stackpath.bootstrapcdn.com/bootstrap/4.3.1/css/bootstrap.min.css">
<script src="https://obniz.io/js/jquery-3.2.1.min.js"></script>
<script src="https://unpkg.com/obniz@3.2.0/obniz.js" crossorigin="anonymous"></script>
<script src="https://unpkg.com/m5stickcjs/m5stickc.js"></script>
</head>
<body>
<div id="obniz-debug"></div>
<font size="7">
M5StickC 回転Servo 2WD Car<br><br>
</font>
<button id="FORWARD_LEFT" class="btn btn-warning" style="width:30%;height:80px;font-size:60px;">↖</button>
<button id="FORWARD" class="btn btn-warning" style="width:30%;height:80px;font-size:60px;">↑</button>
<button id="FORWARD_RIGHT" class="btn btn-warning" style="width:30%;height:80px;font-size:60px;">↗</button><br><br>
<button id="TURN_LEFT" class="btn btn-warning" style="width:30%;height:80px;font-size:60px;">↺</button>
<button id="STOP" class="btn btn-warning" style="width:30%;height:80px;font-size:60px;">STOP</button>
<button id="TURN_RIGHT" class="btn btn-warning" style="width:30%;height:80px;font-size:60px;">↻</button><br><br>
<button id="BACK_LEFT" class="btn btn-warning" style="width:30%;height:80px;font-size:60px;">↙</button>
<button id="BACK" class="btn btn-warning" style="width:30%;height:80px;font-size:60px;">↓</button>
<button id="BACK_RIGHT" class="btn btn-warning" style="width:30%;height:80px;font-size:60px;">↘</button><br><br>
<script>
const Lhome = 92; //右停止
const Rhome = 92; //左停止
const LF = +85; //左前進
const LB = -85; //左後進
const RF = -85; //右前進
const RB = +85; //右後進
var obniz = new M5StickC('XXXX-XXXX');
obniz.onconnect = async function () {
var Servo_L = obniz.wired("ServoMotor" , {signal:26} );
var Servo_R = obniz.wired("ServoMotor" , {signal:32} );
obniz.led.on();
$("#FORWARD_LEFT").on('touchstart mousedown' ,async ()=> { await FORWARD_LEFT(); })
$("#FORWARD_LEFT").on('touchend mouseup' ,async ()=> { await STOP(); })
$("#FORWARD").on('touchstart mousedown' ,async ()=> { await FORWARD(); })
$("#FORWARD").on('touchend mouseup' ,async ()=> { await STOP(); })
$("#FORWARD_RIGHT").on('touchstart mousedown' ,async ()=> { await FORWARD_RIGHT(); })
$("#FORWARD_RIGHT").on('touchend mouseup' ,async ()=> { await STOP(); })
$("#TURN_LEFT").on('touchstart mousedown' ,async ()=> { await TURN_LEFT(); })
$("#TURN_LEFT").on('touchend mouseup' ,async ()=> { await STOP(); })
$("#STOP").on('touchend mouseup' ,async ()=> { await STOP(); })
$("#TURN_RIGHT").on('touchstart mousedown' ,async ()=> { await TURN_RIGHT(); })
$("#TURN_RIGHT").on('touchend mouseup' ,async ()=> { await STOP(); })
$("#BACK_LEFT").on('touchstart mousedown' ,async ()=> { await BACK_LEFT(); })
$("#BACK_LEFT").on('touchend mouseup' ,async ()=> { await STOP(); })
$("#BACK").on('touchstart mousedown' ,async ()=> { await BACK(); })
$("#BACK").on('touchend mouseup' ,async ()=> { await STOP(); })
$("#BACK_RIGHT").on('touchstart mousedown' ,async ()=> { await BACK_RIGHT(); })
$("#BACK_RIGHT").on('touchend mouseup' ,async ()=> { await STOP(); })
async function FORWARD(){
Servo_L.angle(Lhome+LF);
Servo_R.angle(Rhome+RF);
}
async function BACK(){
Servo_L.angle(Lhome+LB);
Servo_R.angle(Rhome+RB);
}
async function FORWARD_LEFT(){
Servo_L.angle(Lhome);
Servo_R.angle(Rhome+RF);
}
async function TURN_LEFT(){
Servo_L.angle(Lhome+LB);
Servo_R.angle(Rhome+RF);
}
async function FORWARD_RIGHT(){
Servo_L.angle(Lhome+LF);
Servo_R.angle(Rhome);
}
async function TURN_RIGHT(){
Servo_L.angle(Lhome+LF);
Servo_R.angle(Rhome+RB);
}
async function BACK_LEFT(){
Servo_L.angle(Lhome);
Servo_R.angle(Rhome+RB);
}
async function BACK_RIGHT(){
Servo_L.angle(Lhome+LB);
Servo_R.angle(Rhome);
}
async function STOP(){
Servo_L.angle(Lhome);
Servo_R.angle(Rhome);
}
}
</script>
</body>
</html>
■最後に
とりあえず回転Servoを簡単に接続する方法はこれで完成です。次は何とかDC Motorも、より簡単に接続する方法を考えていきます。