前提の確認
当記事の概要
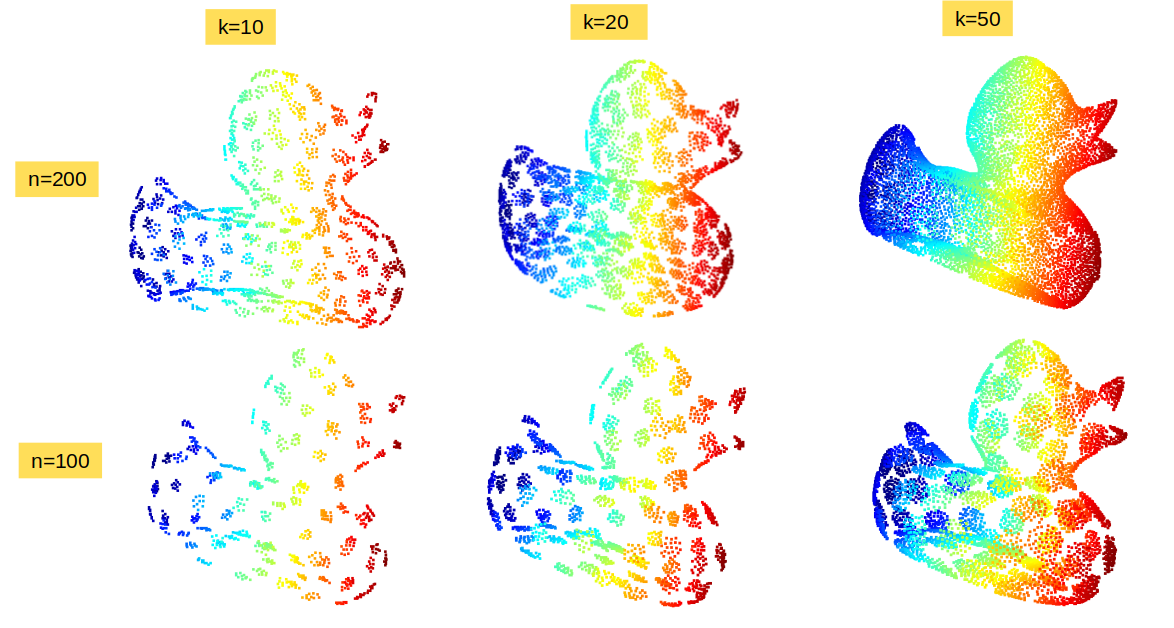
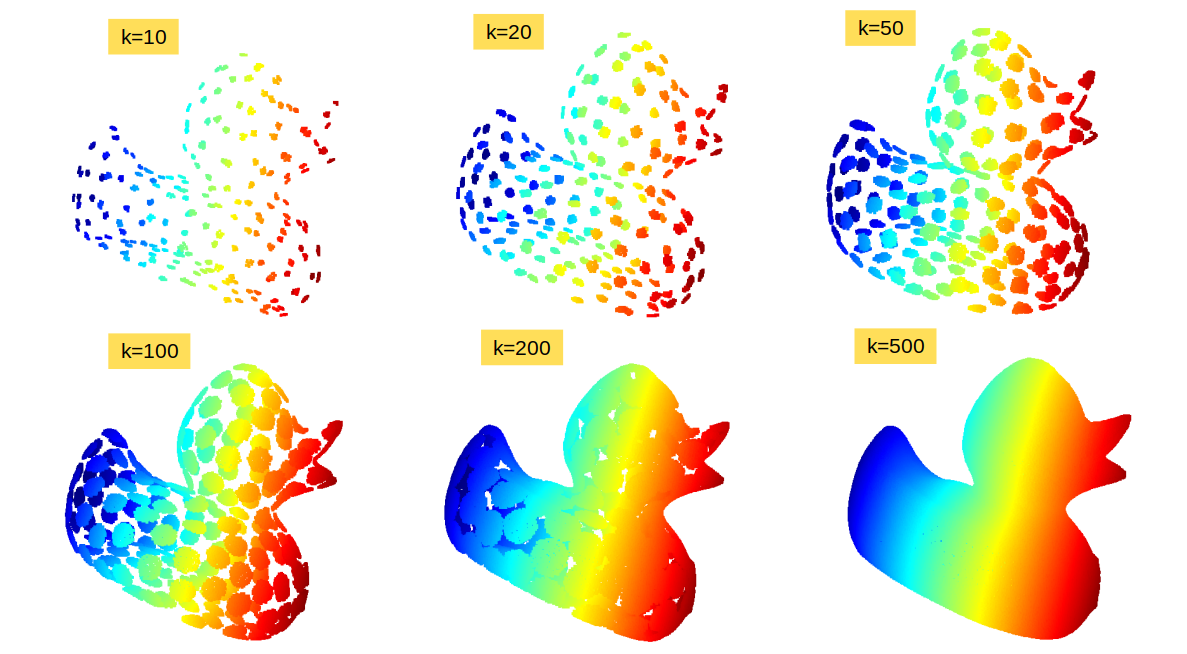
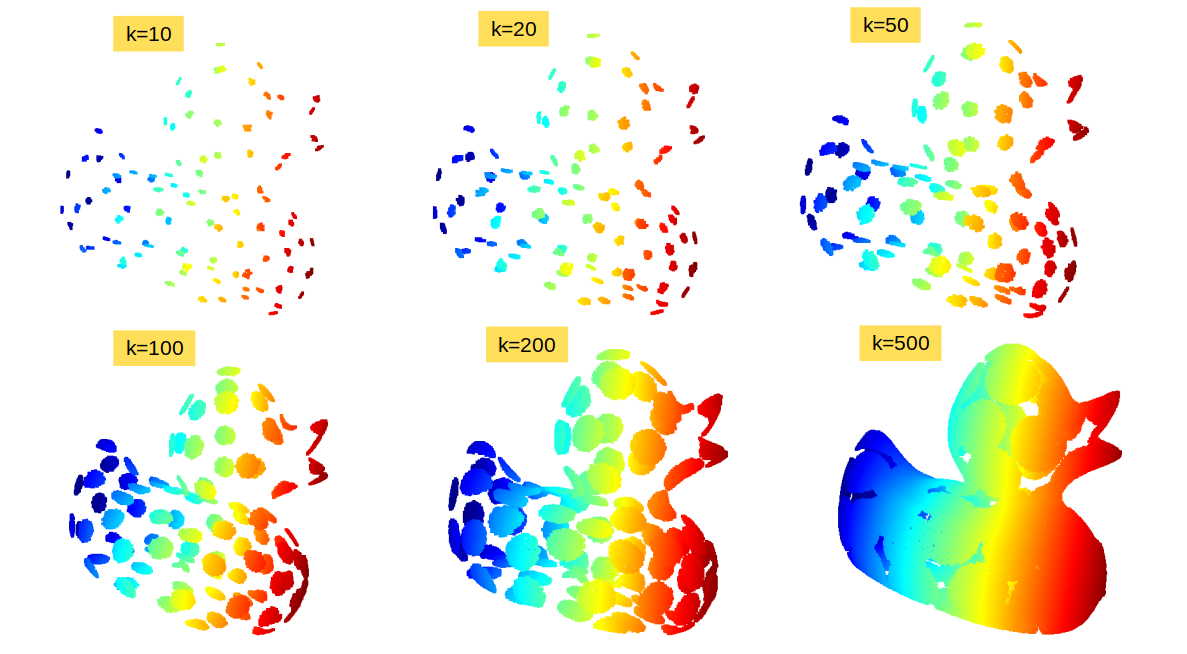
上記で確認したScore-Based-DenoisingではFPS(Farthest Point Sampling)によってサンプリングを行った後の点に対しkNNを実行することで各パッチを作成しGNN(EdgeConv)への入力とします。当記事ではこのような処理を行った際に点群の形状の情報が保持されるかについて検証を行います。
FPSの処理の実行(PyTorch Cluster)
kNNの実行(PyTorch3D)
FPS+kNNの検証(PyTorch Cluster + PyTorch3D)
検証に用いるコード
import torch
from torch_cluster import fps
import numpy as np
import argparse
import open3d as o3d
import pytorch3d.ops
parser = argparse.ArgumentParser()
parser.add_argument('--input_path', type=str, default='data/10000_poisson/duck.xyz')
parser.add_argument('--ratio', type=float, default=0.01)
parser.add_argument('--neighbor', type=int, default=20)
args = parser.parse_args()
x_numpy = np.loadtxt(args.input_path, delimiter=' ')
x = torch.tensor(x_numpy)
batch = torch.zeros(x.shape[0]).long()
index = fps(x, ratio=args.ratio, random_start=False)
print(x[index, :].unsqueeze(0).shape, x.unsqueeze(0).shape)
_, _, patches = pytorch3d.ops.knn_points(x[index, :].unsqueeze(0).float(), x.unsqueeze(0).float(), K=args.neighbor, return_nn=True)
print(patches.view(1,-1,3).shape)
pcd = o3d.geometry.PointCloud()
pcd.points = o3d.utility.Vector3dVector(patches.view(1,-1,3)[0].numpy())
o3d.visualization.draw_geometries([pcd], zoom=1, front=[0.4257, -0.2125, -0.8795], lookat=[0, 0, 0], up=[-0.0694, -0.9768, 0.2024])
duck.xyz
10000_poisson
50000_poisson
・n=200
・n=100
Score-Based-Denoisingの実装のデフォルト

n=30, k=1000(10000_poisson)
n=150, k=1000(50000_poisson)
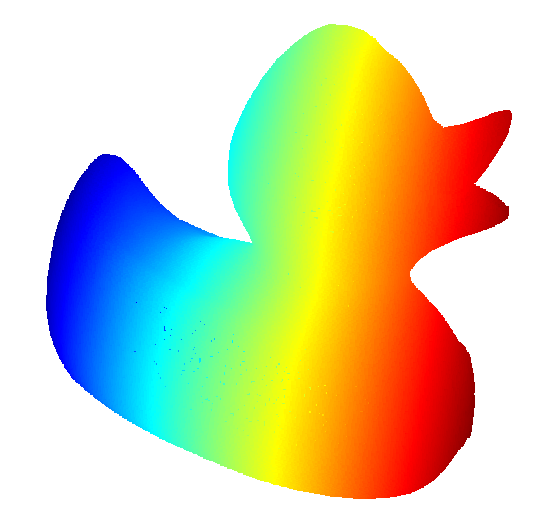
Score-Based-Denoisingでは入力の点群の数の3/1000倍の点の数の周囲の近傍1000個を元にパッチの作成を行います(点群の点の数が10000の場合n=30, k=1000、点群の点の数が50000の場合n=150, k=1000)。実行結果より、概ね元の形状が再現できていることが確認できます。