概要
- ラズパイに人感センサーを取り付けて動作することを確認します。
事前準備
-
ラズパイのセットアップが完了していること。
-
人感センサー
- HiLetgo® 3個セット HC-SR501
- 安いので3個セットを購入しましたが、1個で十分です。
-
ジャンパーワイヤー
- ブレッドボードジャンパーワイヤー
- 持っているものがあれば購入は必要ありませんが、安くて「オス-オス」、「メス-メス」、「オス-メス」が各40本ずつあるのでなければ購入しちゃいましょう。(コスパ良)
-
GPIO配置図
- 下記を参考に接続していきます。
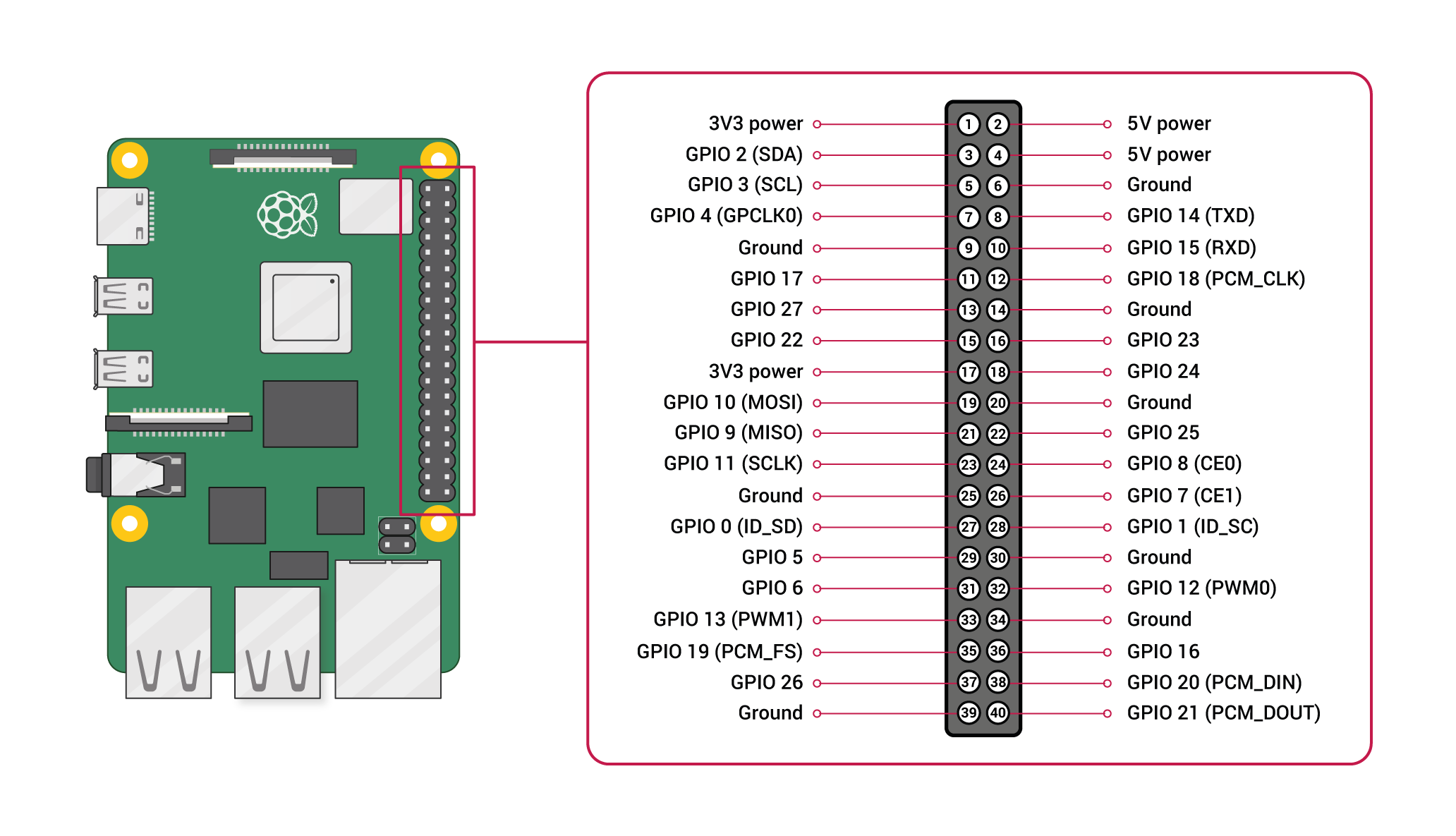
- 下記を参考に接続していきます。
手順
-
まずはセンサーを見ていきましょう
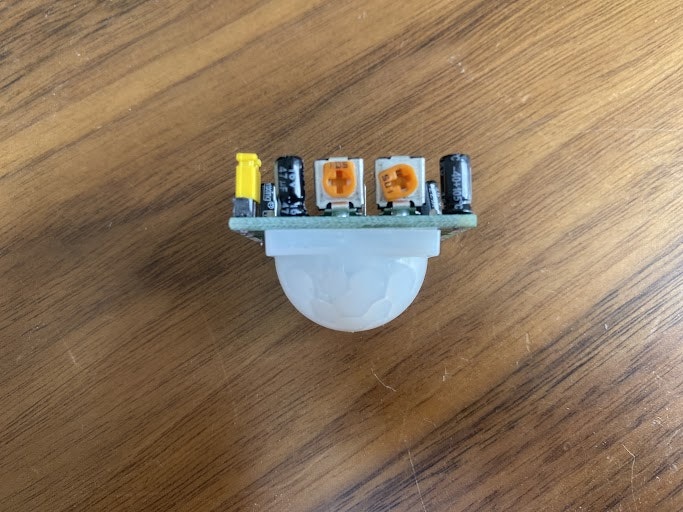
- オレンジ色のピン?ネジ?がありますが、今回は写真の向きで両方を左側にプラスドライバーを使って回転させます。(ゆびでも行ける)
- 左側が検知する距離の調整(3m~7m)
- 右側が検知した状態の保持時間(3秒~5分)
- オレンジ色のピン?ネジ?がありますが、今回は写真の向きで両方を左側にプラスドライバーを使って回転させます。(ゆびでも行ける)
-
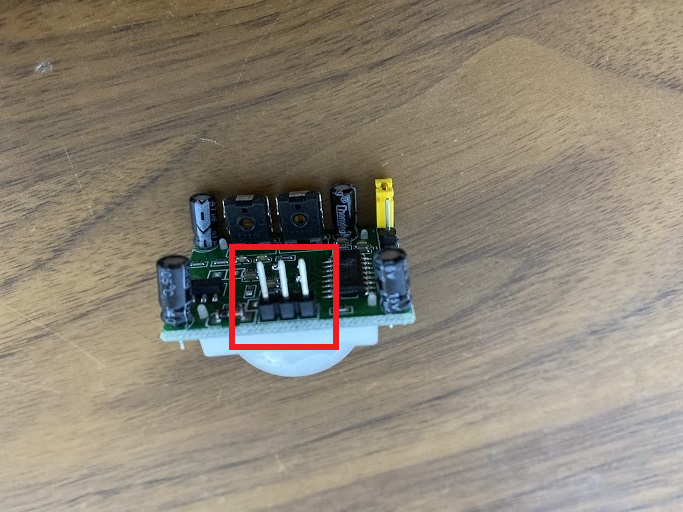
ラズパイにセンサーを接続します。
- 赤枠で囲ったpinは左から「5V」、「OUT」、「GND」となっています。
- 下記のようにそれぞれ接続します。(GPIO配置図を参考にしてください。)
- センサーの「5V」はラズパイの5V Power(pin4)
- センサーの「OUT」はラズパイのGPIO 18(pin12)
- センサーの「GND」はラズパイのGround(pin9)
- 赤枠で囲ったpinは左から「5V」、「OUT」、「GND」となっています。
-
接続するとこのようになると思います。
- 今回はブレッドボードは利用せずに直結してます。

- 今回はブレッドボードは利用せずに直結してます。
-
ラズパイにテスト用スクリプトを準備します。
sample.py
import time
import RPi.GPIO as GPIO
GPIO_PIN = 18
GPIO.setmode(GPIO.BCM)
GPIO.setup(GPIO_PIN,GPIO.IN)
while True:
if(GPIO.input(GPIO_PIN) == GPIO.HIGH):
print("検知!!")
break
print("-")
time.sleep(1)
GPIO.cleanup()
- 実行して手をかざしてみると「検知!!」と表示されました。
- 手をかざさなければ1秒毎に「-」と表示されます。
$ python3 sample.py
-
-
-
検知!!