1.はじめに
どうも、ARIの名古屋支社に勤務している愛知県民です♪
(/・ω・)/
愛知県といえばトヨタ、トヨタといえば車、車といえば自動運転ということで、
ふと自動運転ではどのような技術が使われているのかが気になりました。
そこで今回は自動運転に使用されるAI技術についてまとめてみました!
(トヨタ以外の話も出てきます)
車のIT技術について、勉強中の方の参考になれば幸いです。
(*^^)v
2022/7/7追記
現時点の自動運転車・AI技術について、以下の記事にまとめました!
https://qiita.com/Aichi_Lover/items/919b02174f2f1a3e68b5
2022/7/14追記
未来の自動運転車・AI技術について、以下の記事にまとめました!
https://qiita.com/Aichi_Lover/items/7d6325dfadb629dbe162
2.自動運転に使用されるAI技術の概要
自動運転には以下の3つのプロセスがあります。
(人間に例えると 目で「認識」 → 脳で「判断」 → 体を「動かす(操作)」 と同じです。)
- センサを用いて外部の情報を「認識」する
- 認識した情報を基に電子制御ユニットで「判断」する
- ハンドル、アクセル、ブレーキを「操作」する
今回は各プロセスで、どのような技術が使われているかをまとめました。
2.1.認識(センサ)について
自動運転には、道や他の車、歩いている人などの周囲の状況を認識するセンサが不可欠です。
これらの情報を認識するために、主に使われるセンサは以下の3種類です。
- カメラ
- ミリ波レーダ
- LiDAR
それぞれのセンサには、下表で示すように長所・短所があります。
| 概要 | 長所 | 短所 | |
|---|---|---|---|
| カメラ | 情報を画像で認識 | ・安価(数百円~)かつ小型 ・色を認識でき、標識や白線の位置を認識可能 ・複数個のカメラにより物体との距離が計測可能 |
・悪天候時や暗所では情報を認識しづらい |
| ミリ波レーダ | 対象物に電波を照射し、反射した電波を検出することで、物体の形状や距離を認識 | ・悪天候時や暗所においても情報認識可能 | ・カメラに比べ高価(数万円~) ・電波の反射率が低い物体(段ボール等)の検知が難しい |
| LiDAR | 対象物にレーザー光を照射し、反射した光を検出することで、物の形状や距離を認識 | ・悪天候時や暗所においても情報認識可能 ・広い範囲を精度良く認識 |
・カメラとミリ波レーダーに比べ高価(数十万円~数百万) |
LiDARとはLight Detection and Ranging(光による検出と測距)の略です。
読み方は「ライダー」です。
これら3つのセンサの中で、カメラは公道を走る多くの車にもついています。
バックカメラは、車をバックさせる際に車の後方の様子をモニタに表示し、
運転席からは見えない周囲の状態を確認できます。
(自分も駐車のときはバックカメラにお世話になってます・・・)
カメラはその他にもドライブレコーダーとして使われています。
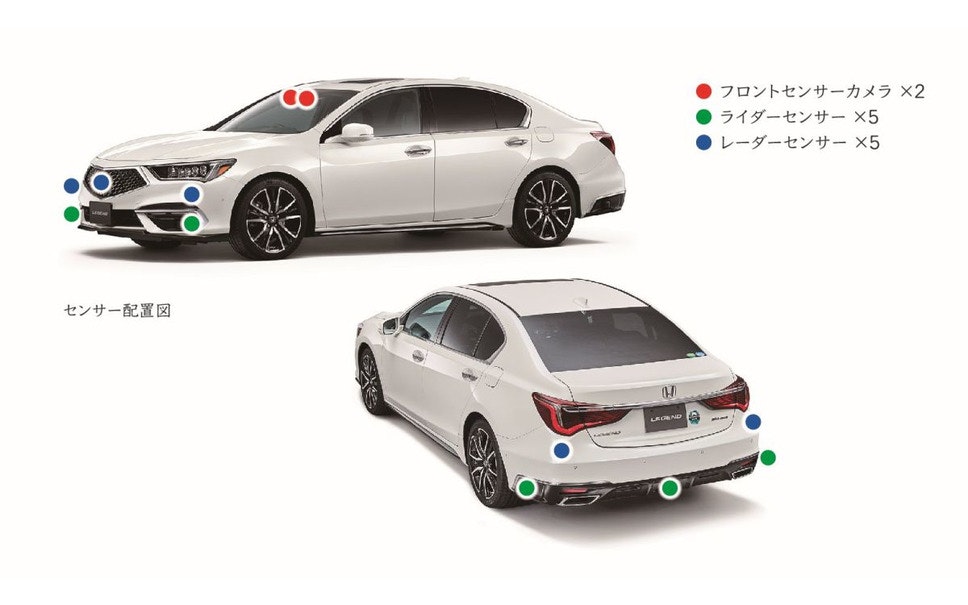
2021年3月に世界初の高速道路における完全自動運転を実現した、
ホンダ レジェンドでは、各センサは以下のように配置されています。
 |
|---|
| 図:ホンダ レジェンドのセンサー配置 出典:Automotive media Response https://response.jp/article/2021/03/04/343661.html |
高額なLiDAR(図中の緑丸、ライダーセンサ)を5つ使用し、
値段は1100万円と高額ですが、コストよりも信頼性を優先する形で販売されました。
現在はリースのみ100台限定とのことです。
2.2.判断(電子制御ユニット)について
車にはECUと呼ばれる電子制御コンピュータが搭載されています。
ECUとは、Electronic Control Unitの略です。
燃料制御、トランスミッション制御等の車の基本的な機能を担うものから、
自車位置の把握、カメラ・センサ情報処理等の自動運転に関連するものまで、ECUの種類は多岐にわたります。
車には100個を超えるECUが搭載されています。
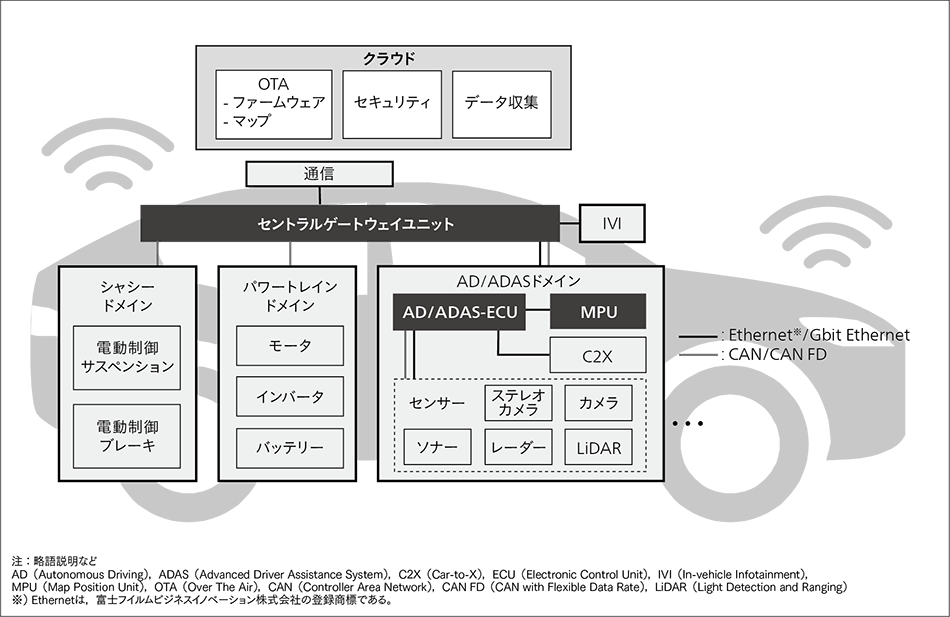
自動運転車両の制御システムの例として日立を以下図に示します。
 |
|---|
| 図:自動運転車両制御システム例 出典:HIACHI 公式サイト https://www.hitachihyoron.com/jp/archive/2020s/2021/05/05c01/index.html |
以下3ドメインについて、各ドメインのECUが存在し、
セントラルゲートウェイユニットを介して接続されています。
- シャシードメイン
- パワートレインドメイン
- AD/ADASドメイン
ADとは、Autonomous Driving(自動運転)の略です。
ADASとは、Advanced Driver Assistance System(先進運転システム)の略です。
セントラルゲートウェイユニットは膨大な通信量を処理する必要があるため、
CANの多チャンネル化に加え、より広帯域な通信が可能な車載Ethernetを搭載しています。
CANとは、Controller Area Networkの略です。
また、自動運転はシステムが行うので、外部からの攻撃による運転介入を防ぐため、セキュリティ対策が重要となっています。
具体的にはセキュリティ対策として、以下の3機能が搭載されています。
- 不正な通信のフィルタリング
- 不正なソフトウェア書き換えを検知するセキュアブート
- DoS攻撃などの不正アクセスを検知するバス負荷監視機能。
2.3.操作(アクセル・ブレーキ・ハンドルについて)
車の基本操作は以下の3つがあります。
①走る = アクセル操作
②止まる = ブレーキ操作
③曲がる = ハンドル操作
「①走る = アクセル操作」と「②止まる = ブレーキ操作」をシステムが行う車は、すでに世界中に普及しています。
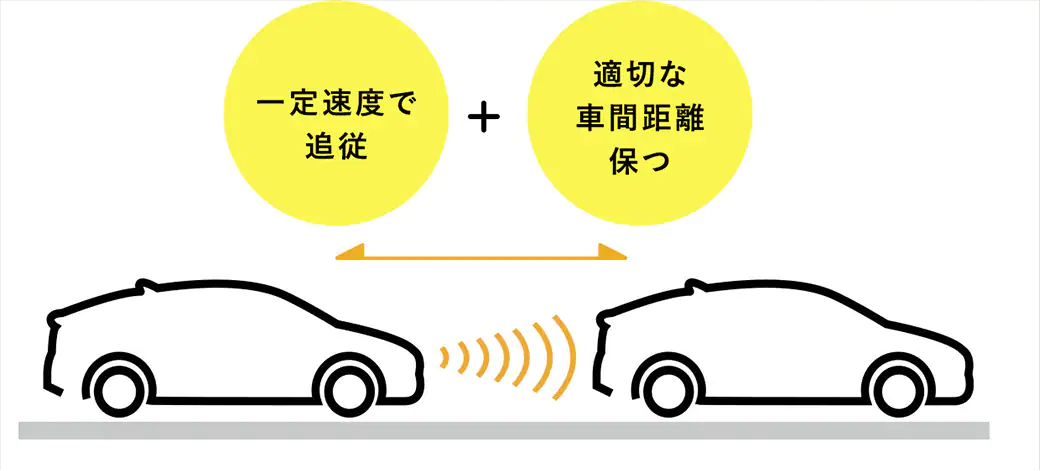
上記システムはACCと呼ばれ、センサが前走車を認識し、
前走車と適切な車間距離を維持するよう車速を自動で調整します。
ACCとは、アダプティブクルーズコントロールの略です。
 |
|---|
| 図:ACCのイメージ 出典:トヨタHP https://toyota.jp/safety/scene/highway/ |
ただし、前走車がいない場合やカーブで見失う場合は、前走車に追従ができません。
前走車の有無に関わらず、自動運転を行うためには、前述した高度なセンサや精密な地図情報が必要です。
センサで、他車・人・物・車線等を認識し、綿密な地図情報と照らし合わせることで、
前走車に追従するだけでなく、ハンドル操作を含めた自律自動運転が行われます。
3.おわりに
ここまで読んで下さり、ありがとうございます!!!
(^^)
車は身近にありますが、色々と調べてみると知らないことが多かったので、とても勉強になりました。
また、利用者である自動車ユーザーとして、そしてIT業界の人間として技術の仕組みを理解したうえで、
これらの運転支援システムや自動運転を使用していきたいと考えました。
次回は、実用化されている自動運転の車についてまとめてみたいと思います♪
(:3_ヽ)_