はじめに
ダブルモーターのラジコン船を、EdgeTXプロポのミキシング機能でドローンと同じ感覚で操作できるようにする方法を紹介します。
ラジコン船の構成
百均のタッパーを使ってラジコン船を作りました。こういう船は世界中で作られていると思います。タンク型ラジコンと同じ仕組みでシンプルです。
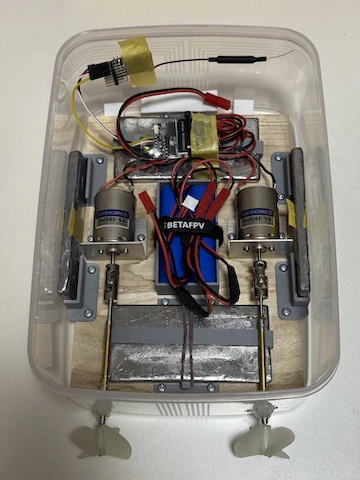
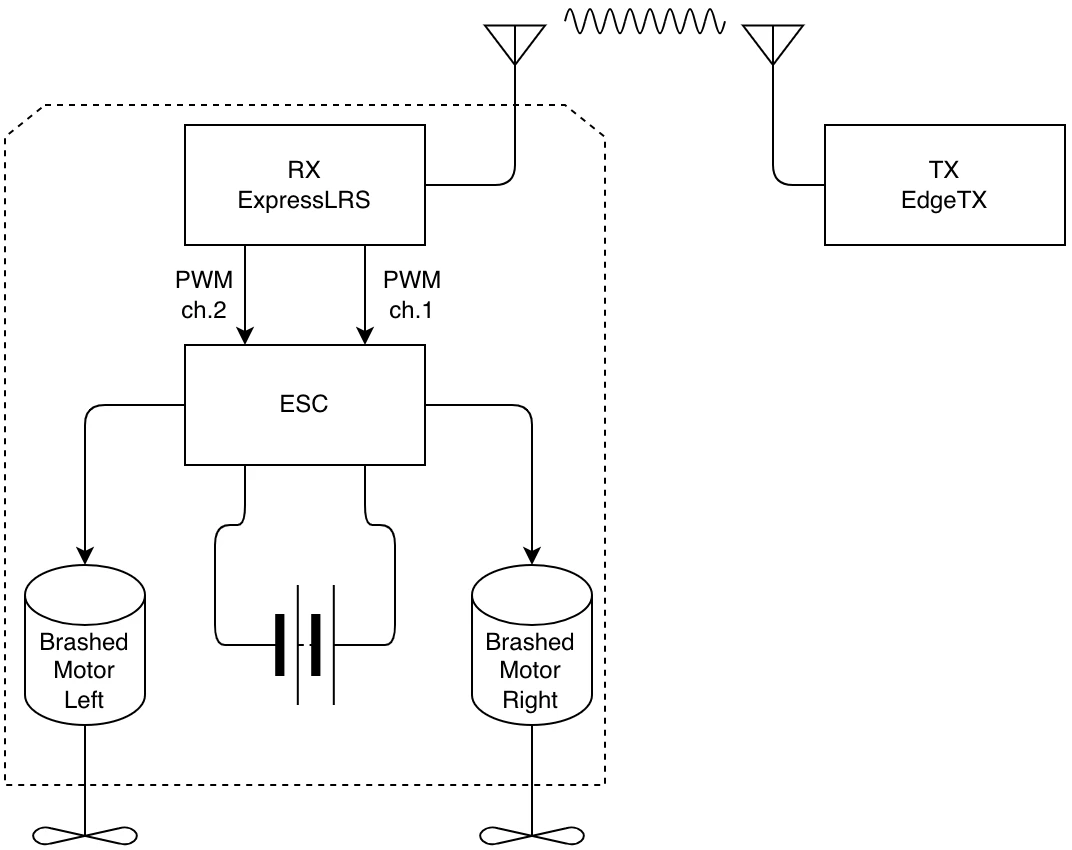
機能ブロック図はこんな感じです。
課題と方針
タンク用モーターESCだと、左右のモーターを独立して操作することになります。慣れていないと操作しづらい。ドローンと同じようにスロットルとエルロンで操作したいところです。
うまい具合にモーターを制御してくれるESC、たとえば近藤科学のMD-2もありますが、ちょっと高い。Pixhawkのようなフライトコントローラーを使う手もありますが、これも高価です。
なるべく安く済ませたいので、AliExpressで安いダブルモーターESC KINGMODEL MIXDRI PRO 5AX2を購入しました。送信機のミキシング機能で操作しやすくすれば解決です。
実はこのESCにはスイッチで独立モードとミキシングモードを切り替える機能がありました。いろいろ設定し始めてから気がついたのですが、悔しいので最後まで続けました。😓
ついでに、ドローンと同じようにアーム・ディスアームもスイッチで操作できるようにしていきます。
使用機材
送信機はJumper T-Lite V1 (JP4IN1)で、ちょっと古めのモデルです。もともとOpenTXでしたが、EdgeTXに書き換えています。外部モジュールにBETAFPV ELRS Nano TX Moduleを搭載しています。
- EdgeTX Version 2.11.5(Jumper T-Liteは2.12以降は非対応)
- ExpressLRS Version 3.6.2(V4.xは気が向いたらアップデートする)
受信機は、以前の記事で取り扱ったELRS 2.4Ghz PWM 7CHです。
設定手順
文章で書くと長くなるので、EdgeTX Companion 2.11.5 のスクリーンショットで説明していきます。
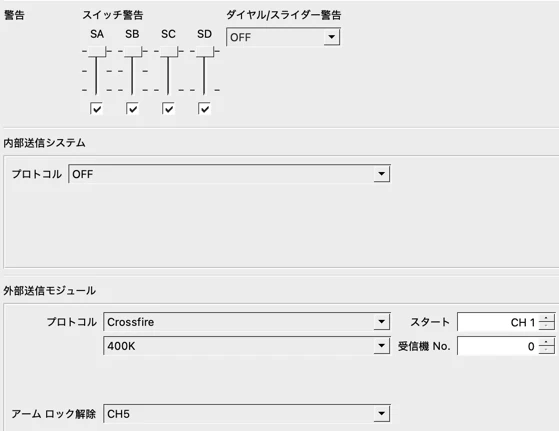
セットアップ
外部送信モジュールを使用する設定です。
ELRS 3.xはアームロック解除がCH5固定です。
入力
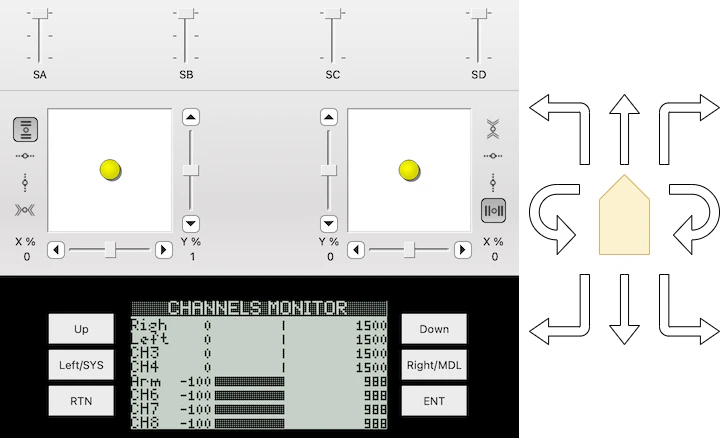
Jumper T-LiteはSAとSBが3ポジション、SCとSDが2ポジションスイッチです。
アームロック解除は1bitなので、2ポジションスイッチを割り当てます。
3ポジションでもいけますが、中央の位置が無意味になるのでもったいないですね。
ここではSDをCH5に割り当てています。

出力
名前をつけているくらいで、特に変更はしていません。

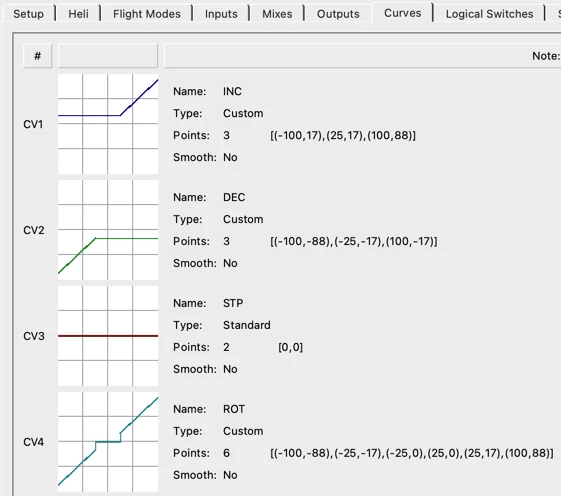
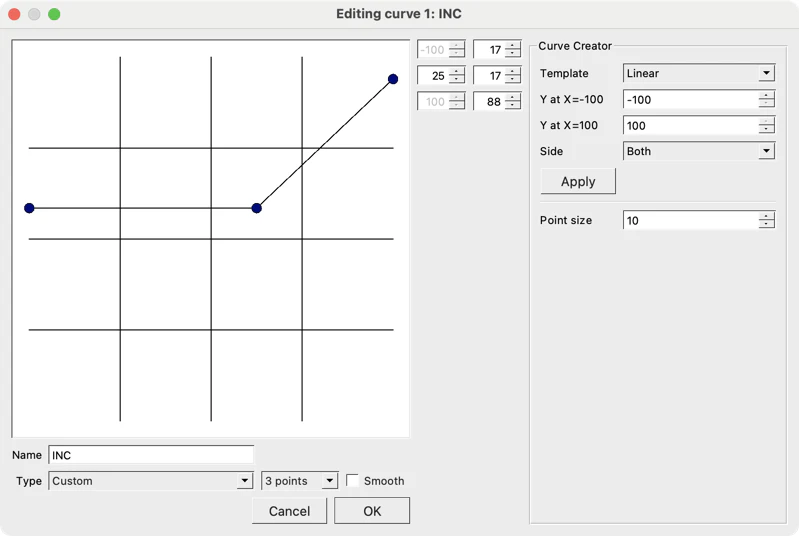
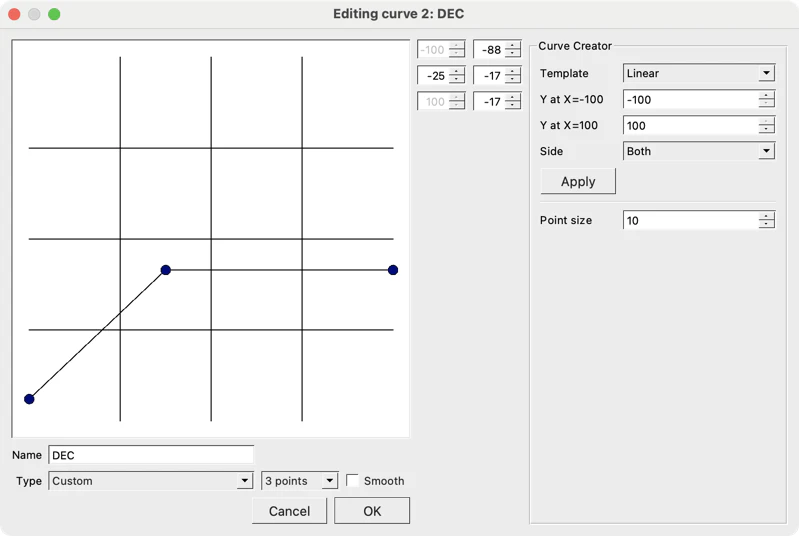
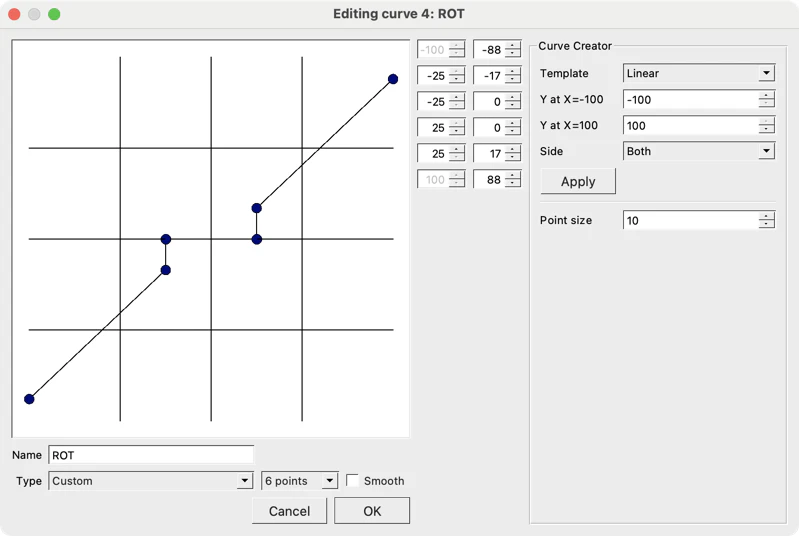
カーブ
CV1〜4に設定を入れています。ミキシングで使います。

論理スイッチ
L01~L05に設定しています。ミキシングに使用します。

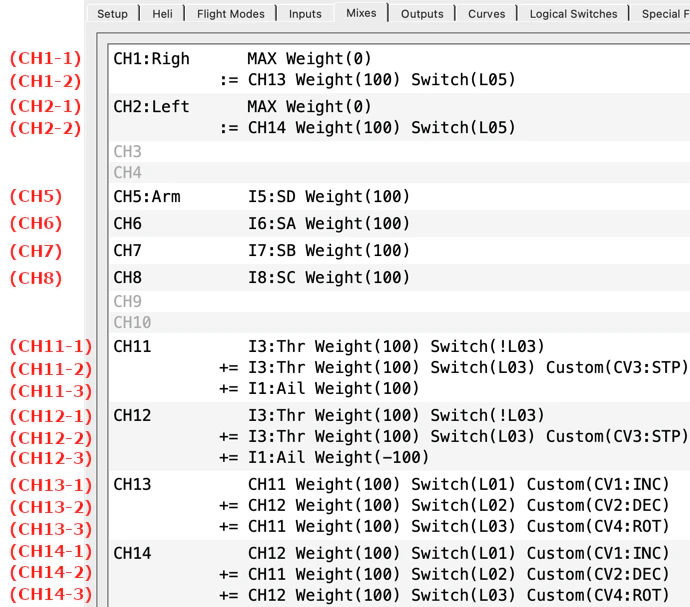
ミキシング
スクリーンショットの通り、かなり複雑です。
説明し始めると終わらないので、設定画面を全部載せておきます。
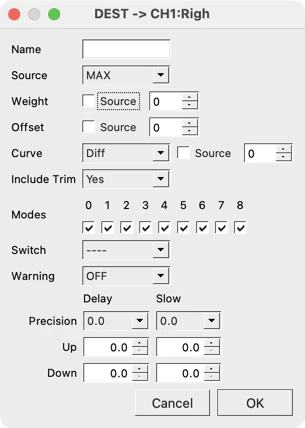
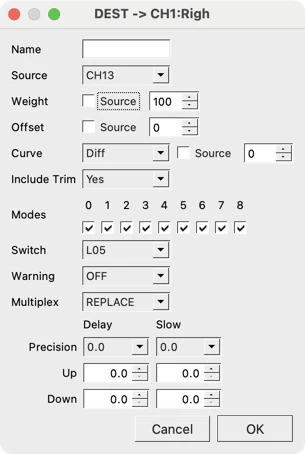
CH1
CH1-1
CH1-2
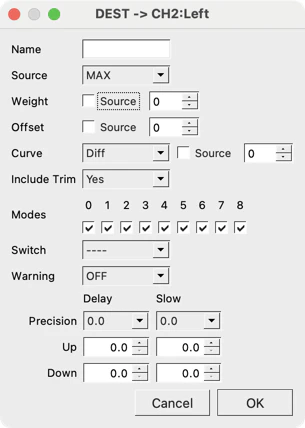
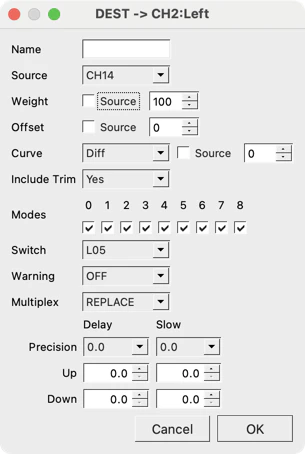
CH2
CH2-1
CH2-2
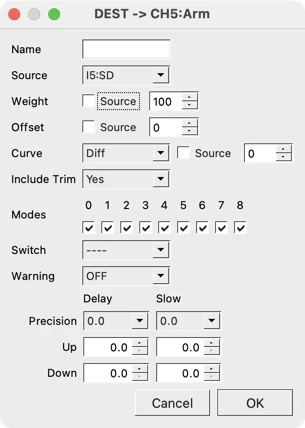
CH5
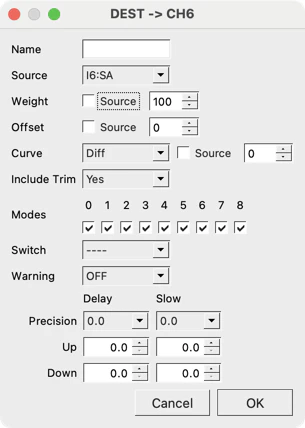
CH6
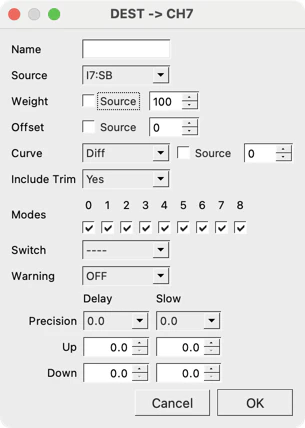
CH7
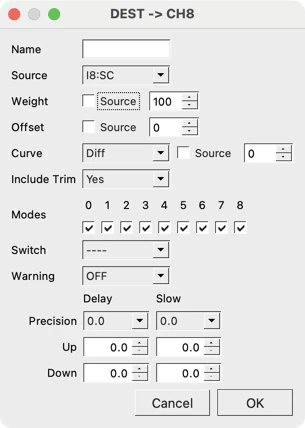
CH8
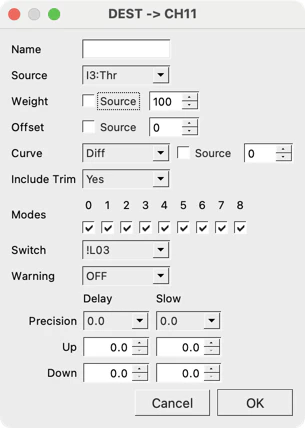
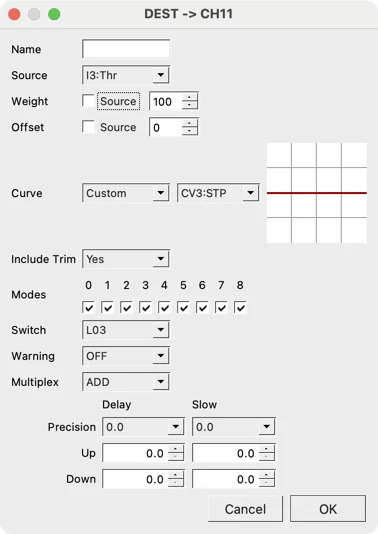
CH11
CH11-1
CH11-2
CH11-3

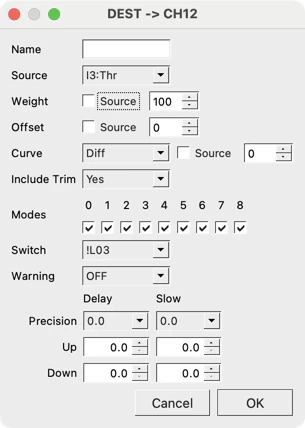
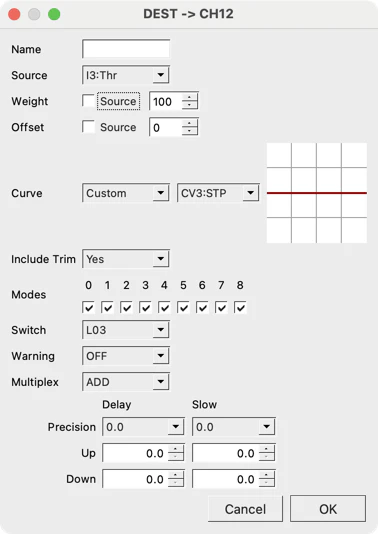
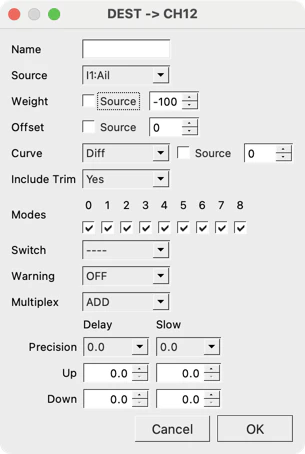
CH12
CH12-1
CH12-2
CH12-3
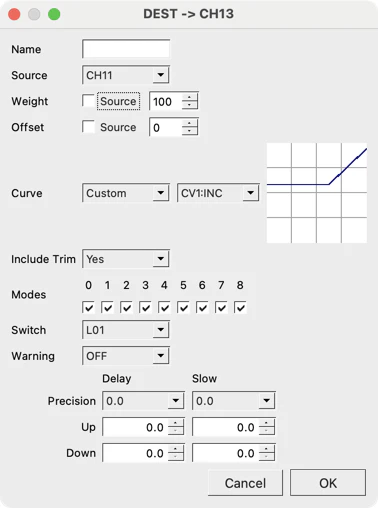
CH13
CH13-1
CH13-2
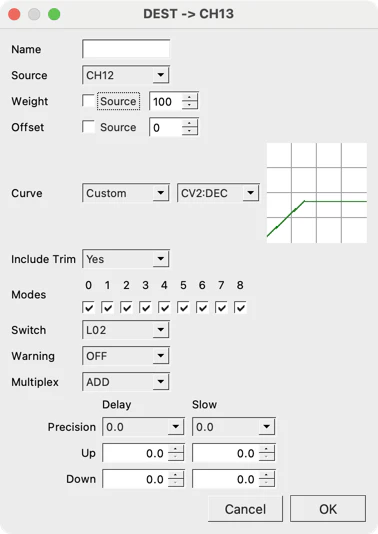
CH13-3

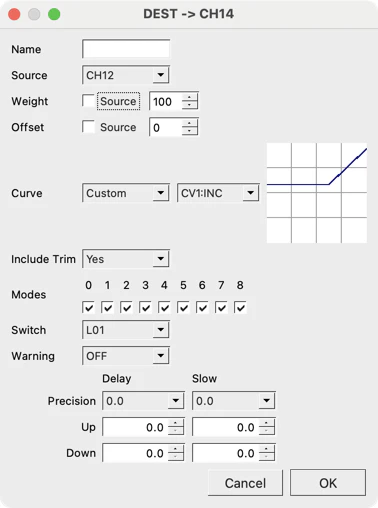
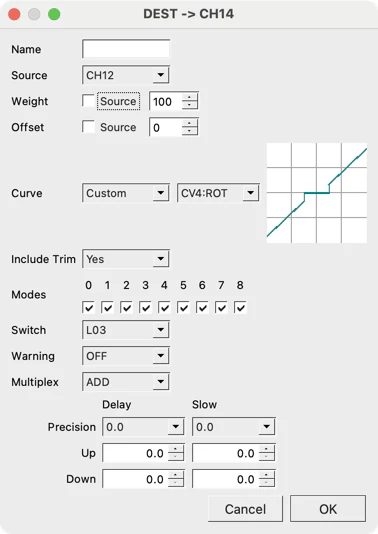
CH14
CH14-1
CH14-2
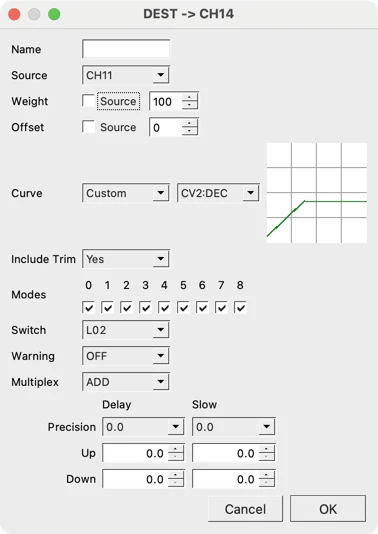
CH14-3
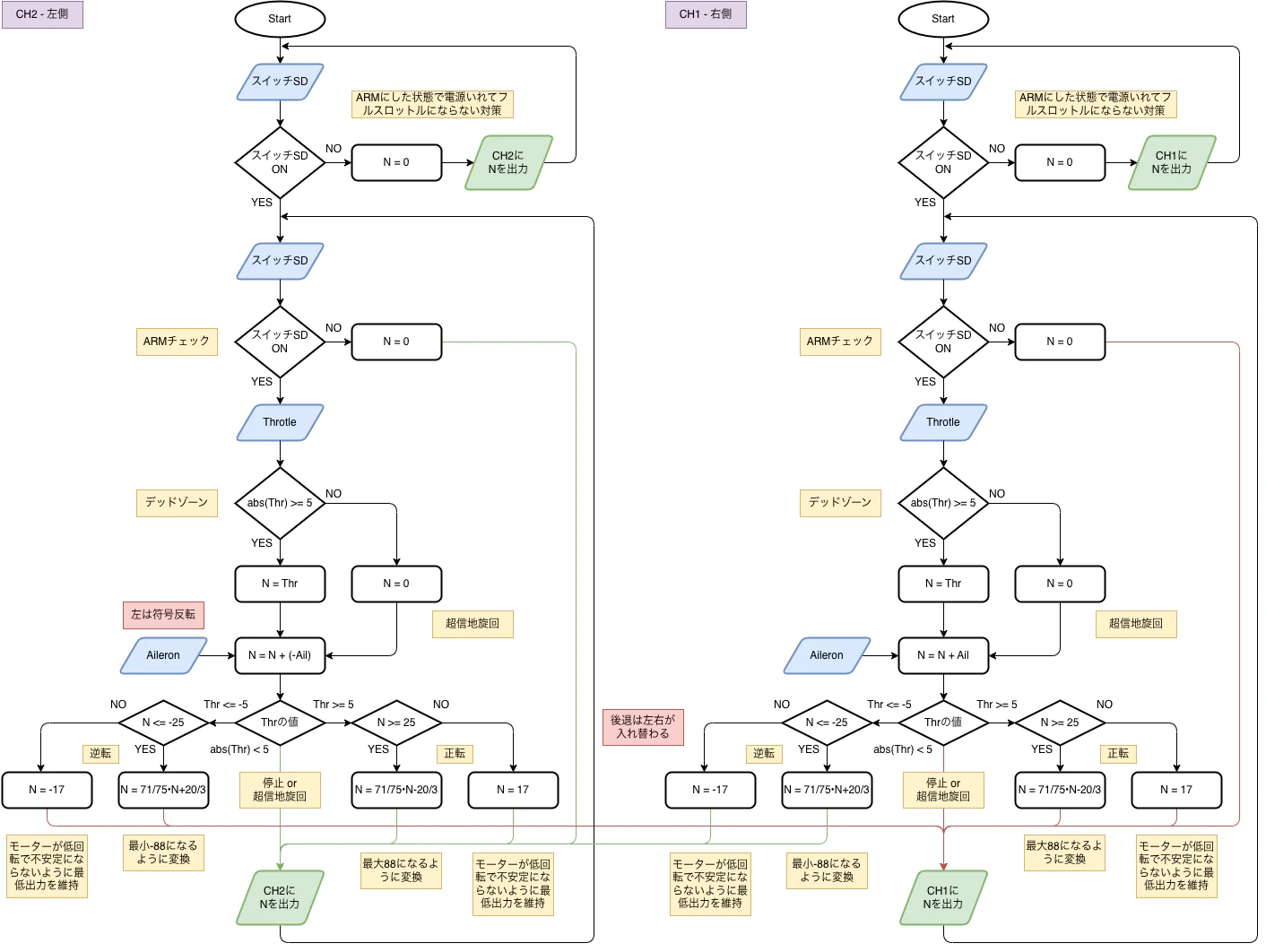
ミキシング・フローチャート
ミキシング画面だけだとさっぱり分からないので、フローチャートを作りました。自分自身の理解にも役立ちました。
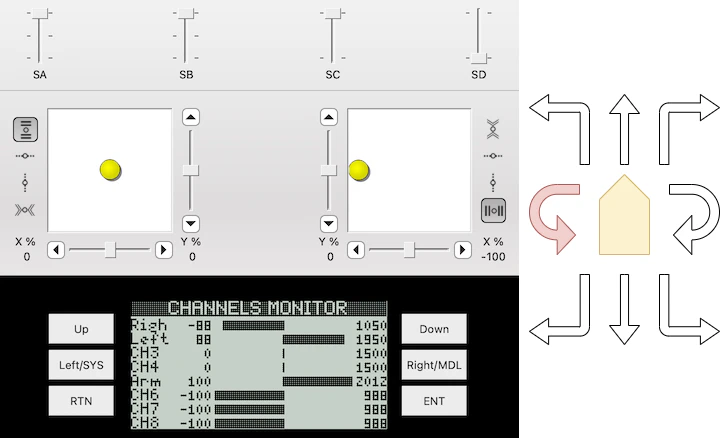
動作確認
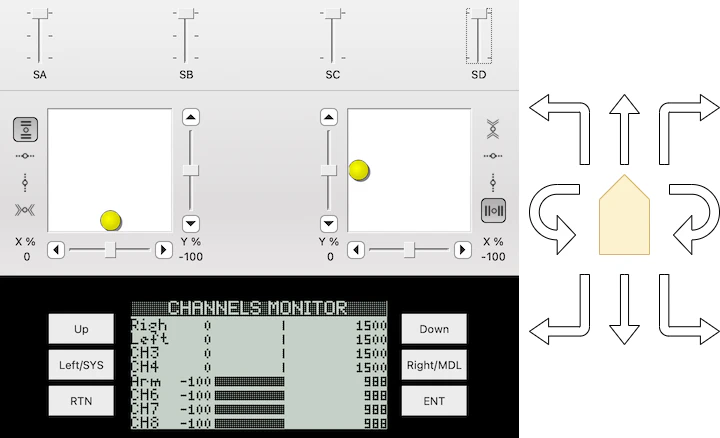
アームロック
SDスイッチがOFFの状態です。
プロポの電源を入れたときにSDスイッチがONだったとしても、いきなり動かないようにミキシングで制御しています。
スティックを動かしても、出力に変化はありません。
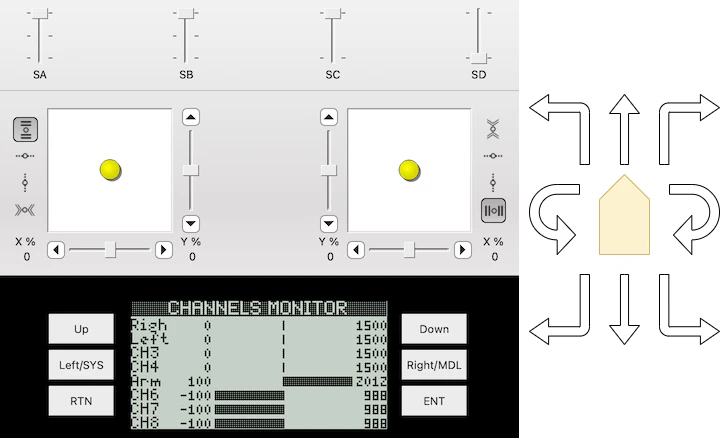
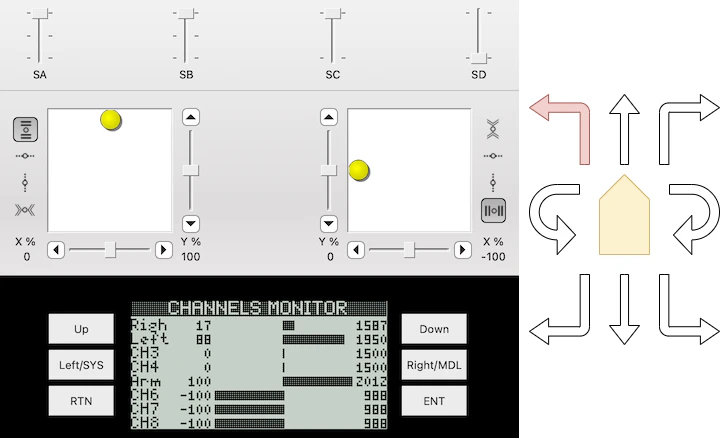
アームロック解除
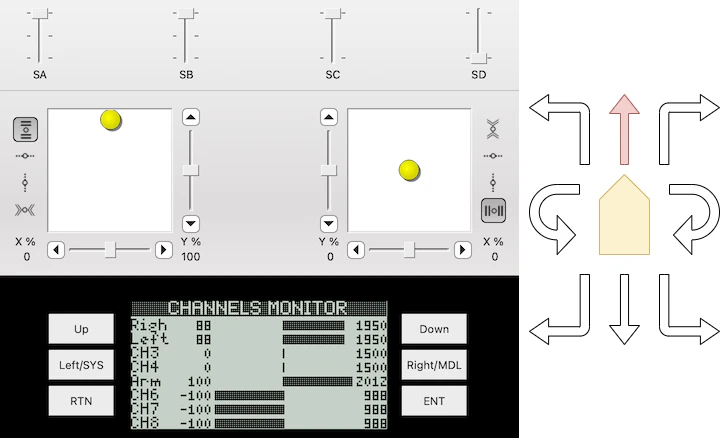
前進
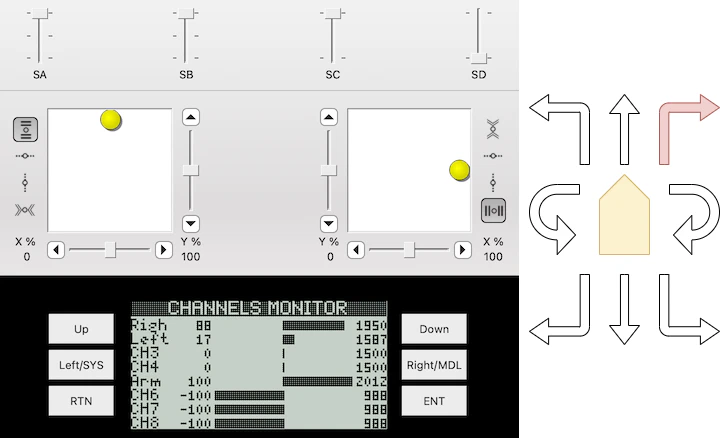
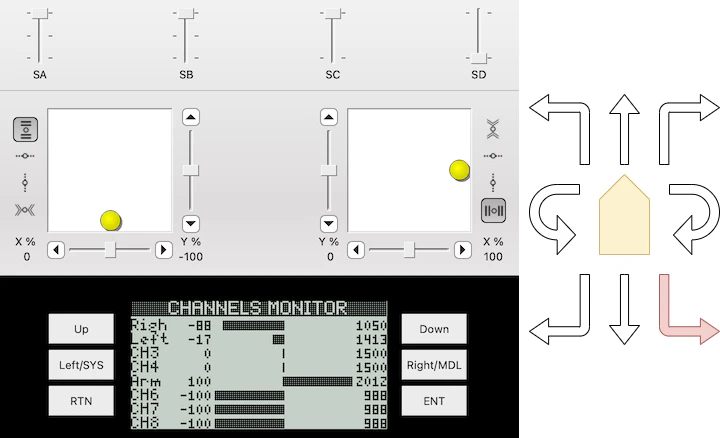
前進右
エルロン(モード2では右スティックの横方向)を右に入れると、左モーターの出力が下がります。
出力ゼロ(PWM 1500)付近だと不安定になるため、一定以下には下がらないように制御しています。
前進左
エルロンを左に入れると、右旋回と逆の動作になります。
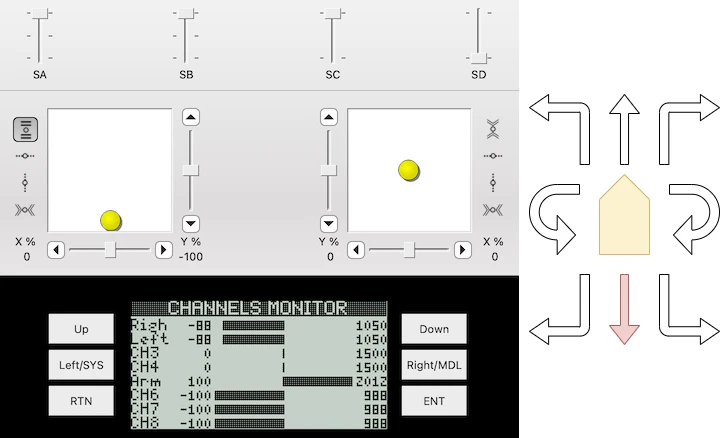
後退
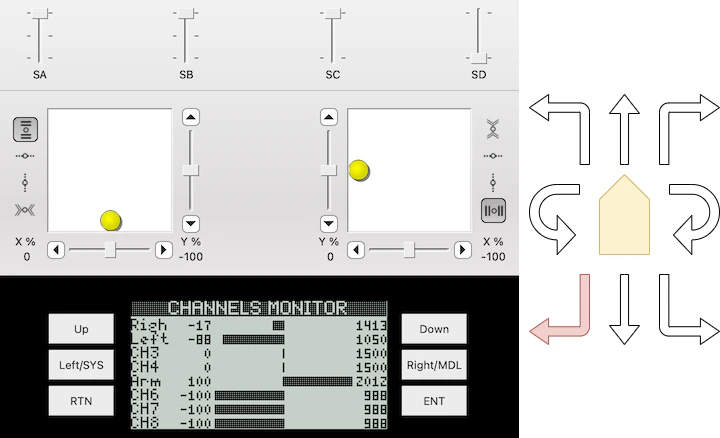
後退右
後退左
回転右
位置はそのままで右回転します。

回転左
位置はそのままで左回転します。
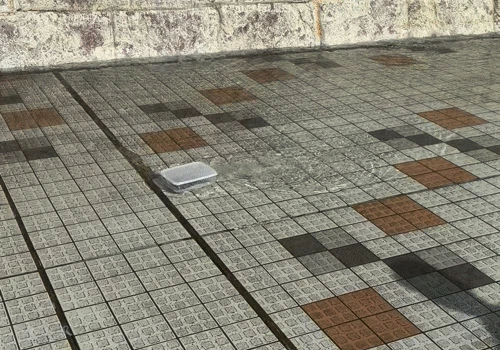
航海
公園の噴水でいざ出港。
ドローンと同じ感覚で操作できるようになったので大満足です。
まとめ
EdgeTXのミキシング設定について、以前より理解が進んだと思います。
まだまだ触れていない機能が多いので、何かの折に試してみたいところです。
次はArduPilotで自動航行にも挑戦してみたいですね。