免責
以下で実施している事項はプラレールの本来の使い方から外れています(いるような気がします)。 この記事の内容を真似たことによる事故・損害については責任を負いかねます。動作環境
- ESP-WROOM-02 (以下ESP8266)
- CR123A
- NチャネルMOSFET 2SK4017
- 単三電池 (アルカリ電池)
- TOMY S-12 ドクターイエロー T3編成 (以下S-12) http://takaratomymall.jp/shop/g/g4904810811756/
- TOMY R-01 レール部品 直線レール
http://www.takaratomy.co.jp/products/plarail/lineup/rail/ - FTDIアダプタ (写真未掲載)
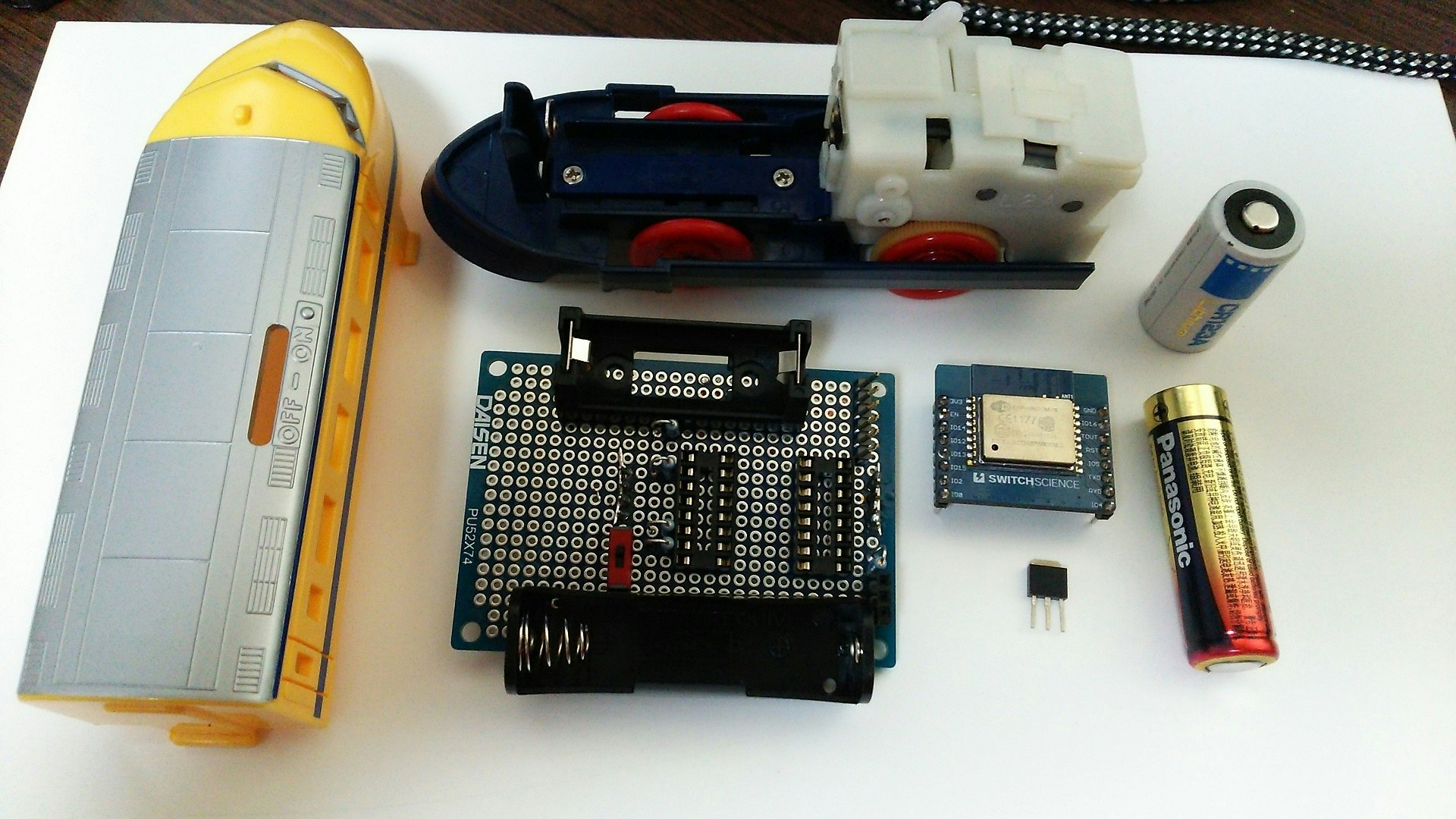
ESP8266の下にある3本足のICが2SK4017。
ユニバーサル基板実装
回路図
http://qiita.com/7of9/items/c7b778b641927247d313#%E5%9B%9E%E8%B7%AF%E5%9B%B3
写真
ESP8266と2SK4017
ESP8266と2SK4017を実装した写真。ESP8266の右下に2SK4017がある(抵抗の下)。
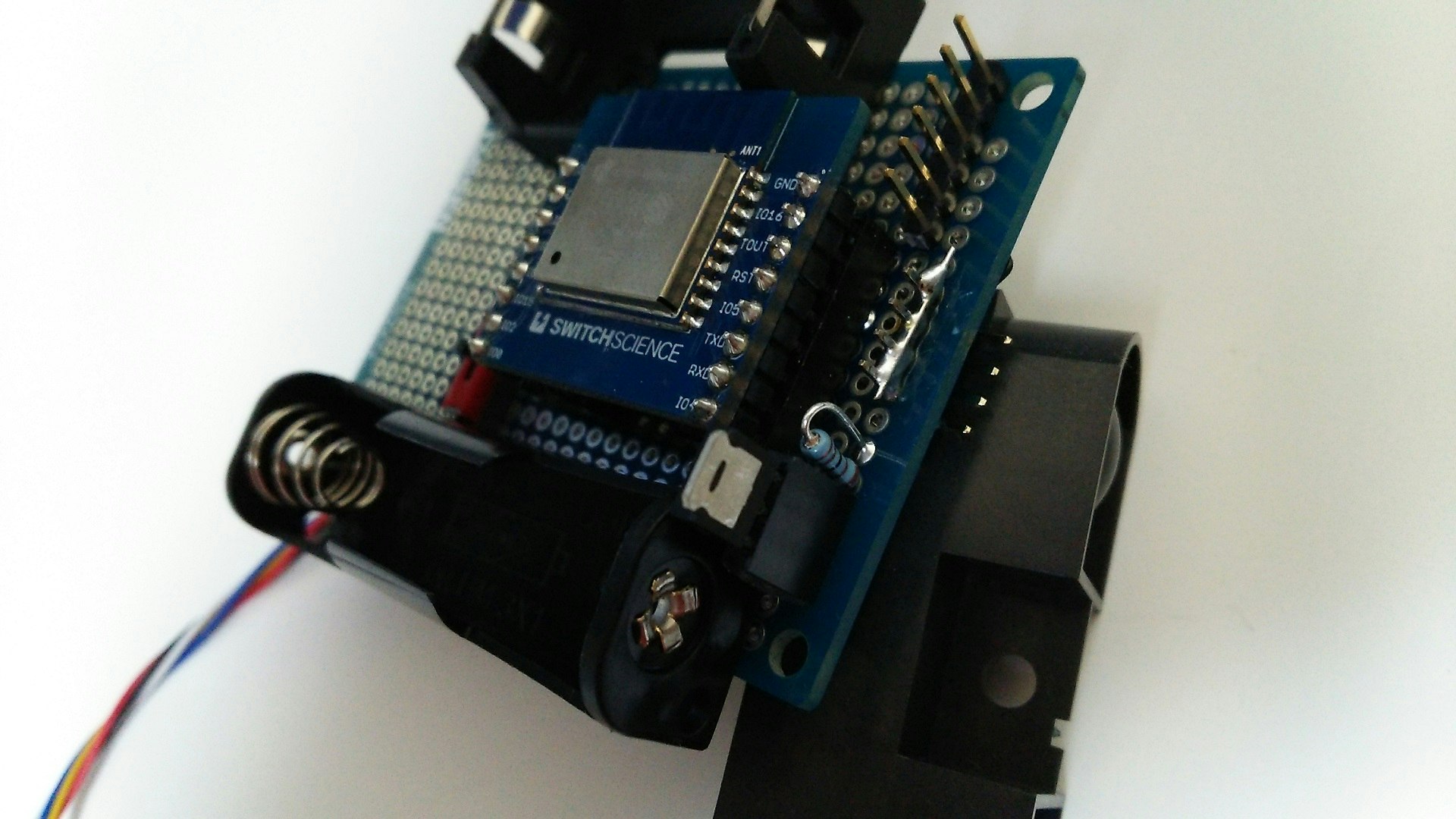
それぞれDIPソケットとストレートピンヘッダを中継して抜き差しできるようにしている。2SK4017が故障時に交換しやすいように。
ユニバーサル基板の台になっているのはシャープの距離センサ。そのうち、このセンサがユニバーサル基板に接続され、本プロジェクトの直線位置調整システムがその距離センサの補正に使われる。
ESP8266の右上のピンヘッダ(6本)にはFTDIアダプタが接続される。
FTDIアダプタ、NチャネルMOSFET、ともに裏表反対にも挿せる。それを防ぐため、正面側はESP8266に向く、というように実装した。
はんだ面
はんだ面の写真。
左側は前回の基板 ( http://qiita.com/7of9/items/6bcce4bf70154d89c4b5 )。
右側が今回の基板。
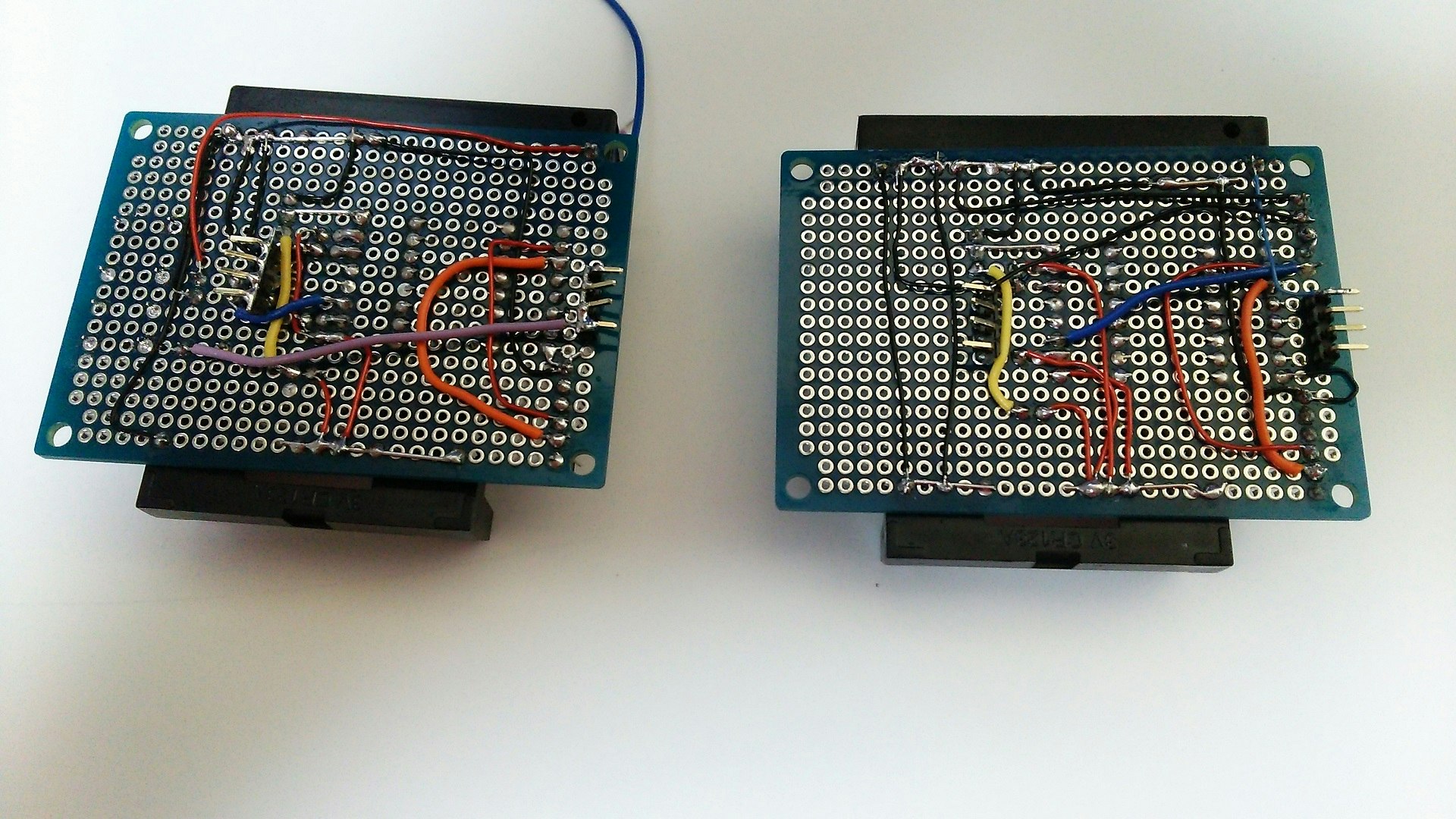
- 黒 : GND関連
- 青 : GPIO14
- 黄 : プルアップ抵抗につながる線
- 赤 : ESP8266のVCCにつながる
- 赤1本はFTDI adaptorの通信に使用
- 中段のL型コネクタ(4本ピン) x 2
- S-12の電池端子に接触させるためのピン
- 4本ピンはリードで接続した
- S-12の電池マイナス端子に接触する方は、中央2本のピンを角度を大きくして、電池端子への接触が良くなるようにした
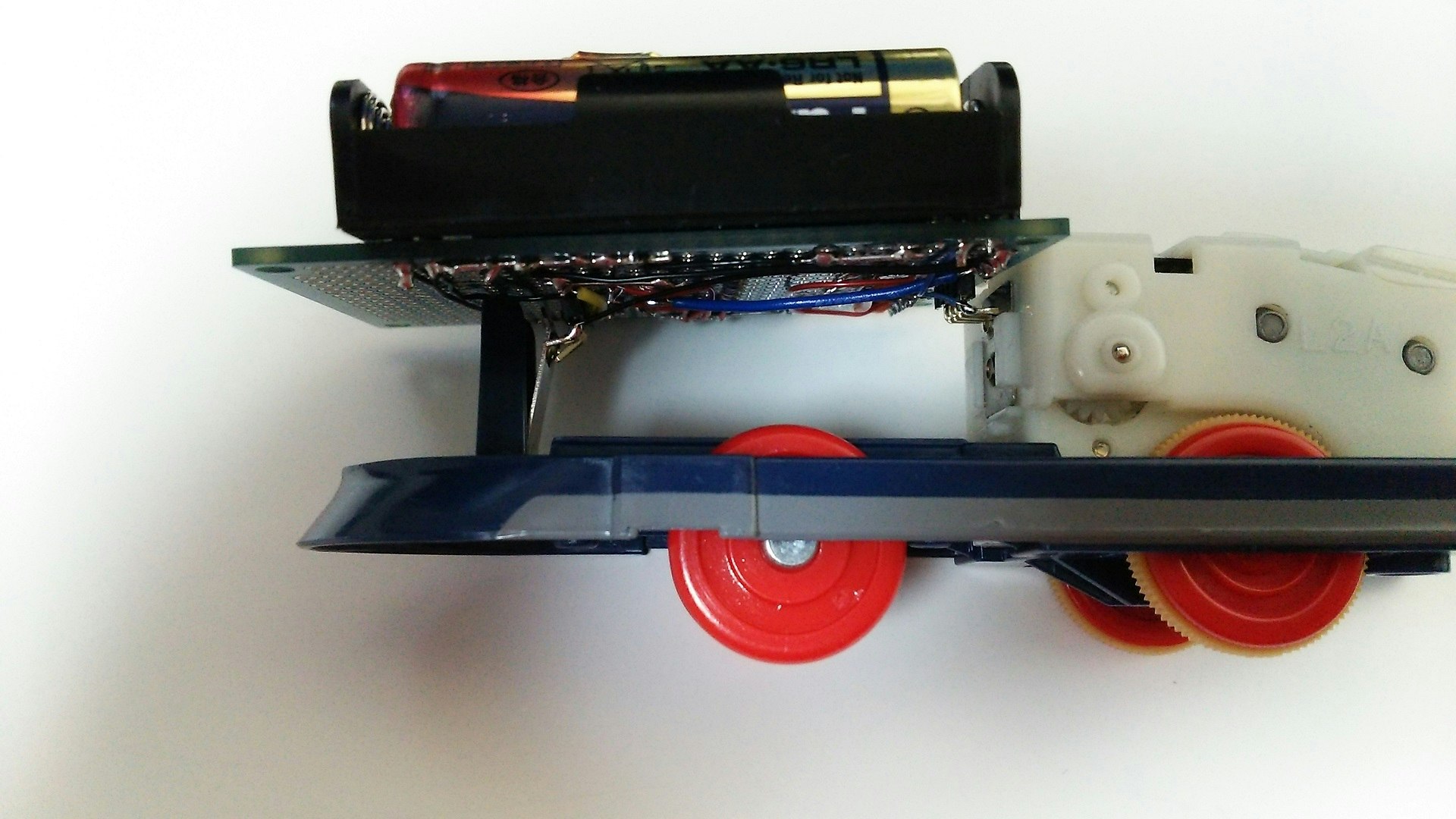
S-12に装着
S-12の下側部分にユニバーサル基板を乗せた状態。
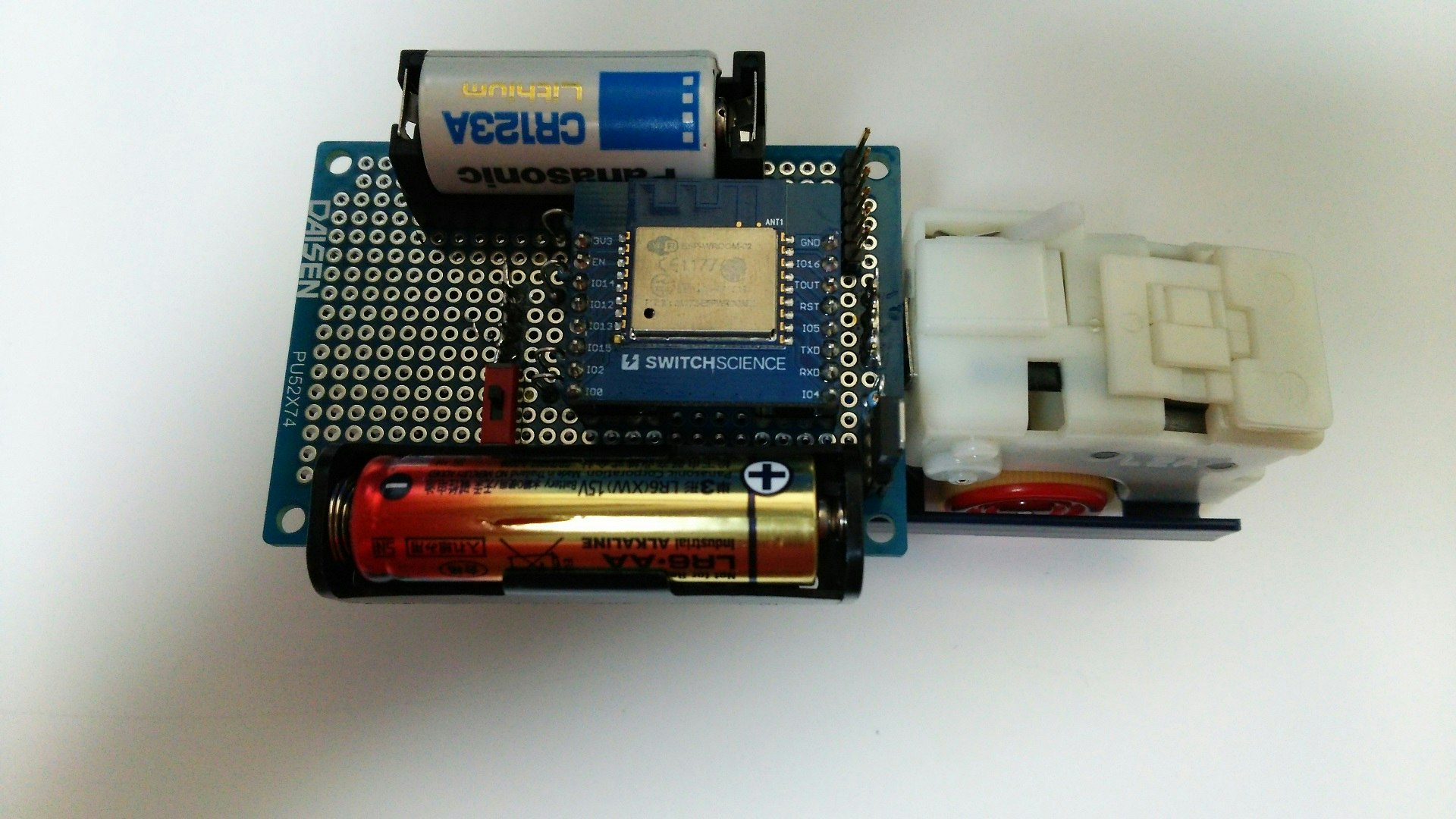
上の電池がESP8266駆動用。
下の単三電池がモーター駆動用。
装着した状態の側面からの写真。
電池の端子にL型ピンヘッダが接触している。
code
以下のコードをそのまま使用。
http://qiita.com/7of9/items/6bcce4bf70154d89c4b5#code-v01
3.3secおきに300msec間モーター駆動用の電池が入る (GPIO14をON)。
結果
1回の運転で (300msecのGPIO14 オンで)動いている様子を以下の記事とした。
備考
- スマホS-12駆動システム (夏休みの工作)
- 直線レールをループレールにする
- ESP8266のプログラムを作る
- UnityなりでESP8266に動作コマンドを送るスマホアプリを作る
夏休みの工作にするにしても、Arduino IDEの使い方やFTDIアダプタのセットアップなどは手間かもしれない。
-
電池
- S-12は従来単二駆動
- 単三での長期駆動によるトラブルは不明
- 今回のプロジェクトでは短時間の駆動を目的としている
-
300msec
- 300msecは思った以上に移動する
- 30msecなどに減らすのが距離センサ補正にいいかもしれない
- その場合、トルクはどうなるのだろうか?