はじめに
https://qiita.com/yosyda/items/2f60bad45002eafcbfc0
で、全く知識無しの状態で myCobot Pi の動作確認だけはしたのですが、その後もいろいろ試していたところ、GUIのスライダー操作で動作することまでは確認できました。
正しい手順なのかはまだ自信がありませんが、メモしておかないと忘れそうなので、ここまでをまとめておきます。
roscore
ROSを動作させるための基本ドライバ(?)のようです。
デフォルトでパスが通っているので、
$ roscore
とターミナルから実行すればOKです。
control_slider.py
~/ros_catkin_ws/src/myCobotROS/scripts にpythonスクリプトがあるのですが、標準状態だと
出力ポートの設定が /dev/ttyUSB になっているため、myCobot Piでは動作しないようです。
myBlockly のpython出力と同じくポートを /dev/ttyAMA0、ボーレートを 1000000 に書き換えたものを
control_slider2.py として用意し、そちらを代わりに起動しました。
(もしかすると、さらに正しい起動手順があるのかもしれませんが・・・)
# !/usr/bin/env python2
# from std_msgs.msg import String
import time, subprocess
import rospy
from sensor_msgs.msg import JointState
from pymycobot.mycobot import MyCobot
def callback(data):
#rospy.loginfo(rospy.get_caller_id() + "%s", data.position)
# print(data.position)
data_list = []
print(data.position)
for index, value in enumerate(data.position):
data_list.append(value)
mc.send_radians(data_list, 80)
# time.sleep(0.5)
def listener():
rospy.init_node('control_slider', anonymous=True)
rospy.Subscriber("joint_states", JointState, callback)
# spin() simply keeps python from exiting until this node is stopped
rospy.spin()
if __name__ == '__main__':
print('start')
# ==========================
# Replace port and baudrate
# ==========================
mc = MyCobot('/dev/ttyAMA0',1000000)
print(mc)
listener()
control.launch よりも前に起動しておきます。

control.launch
$ roslaunch myCobotROS control.launch
とターミナルから実行します。
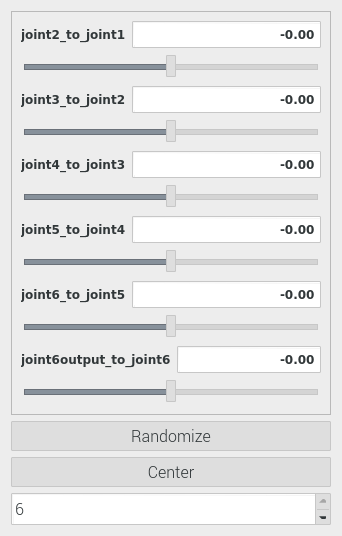
正常に実行されると、GUIのスライダーが表示され、先程のcontrol_slider2.pyのウインドウにログが流れ始めます。
この状態でGUIのスライダーを動かすと、本体も同様に連動して動くことが確認できました。

Centerボタンを押すと直立し、Randomizeボタンを押すとランダムな位置に動きます・・・が、机の上のものをなぎ倒したりするので、事前に卓上の片付けをおすすめします。油断していて、Airpods Proが吹き飛びました。
What's next?
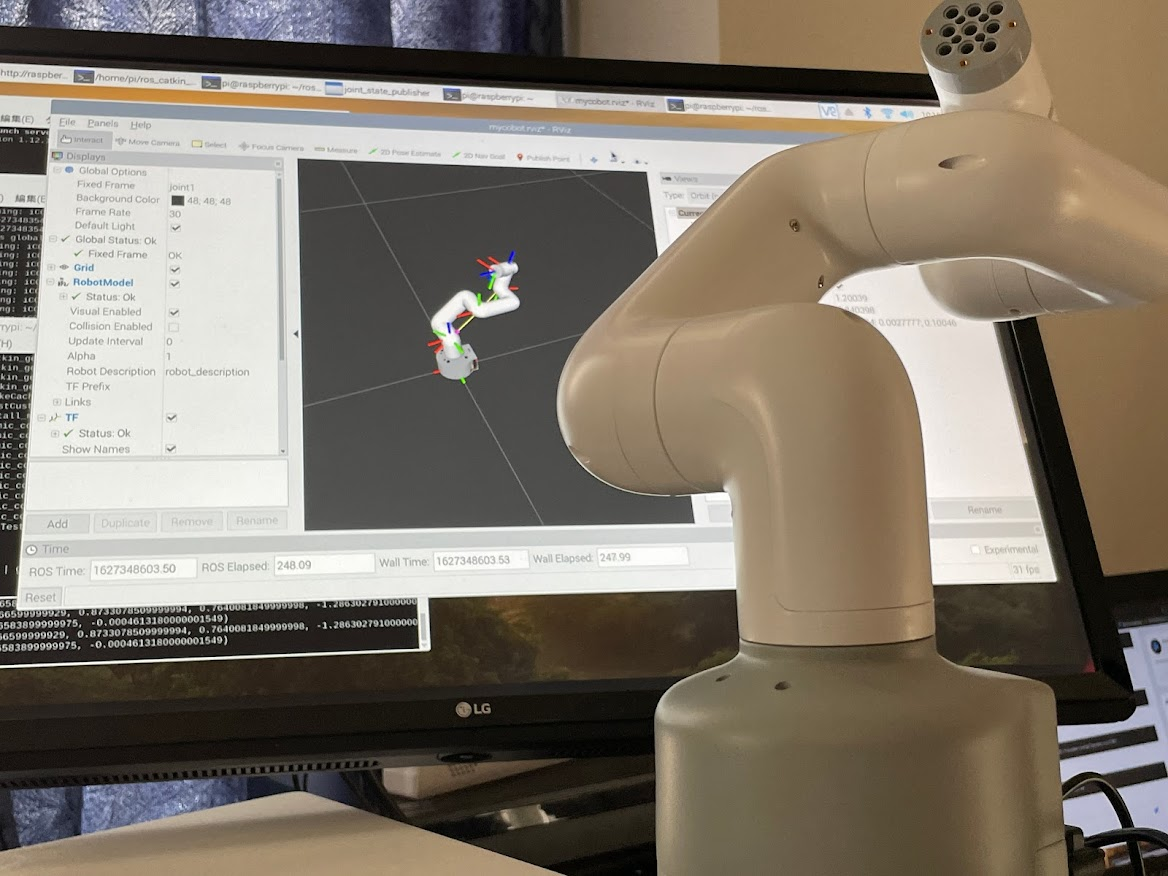
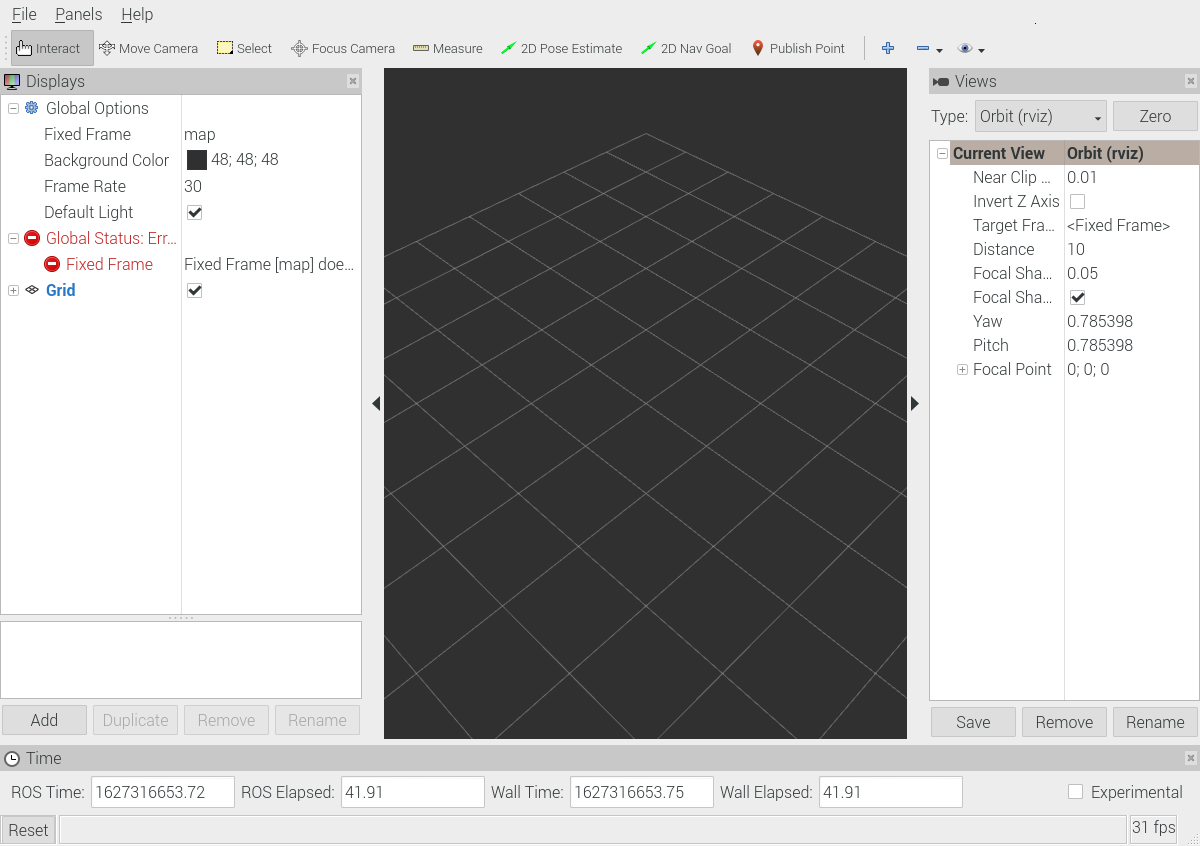
$ rviz
で、rvizアプリが立ち上がるのですが、まだ何もmyCobotのモデルが表示されていないので、次はこれを何とかしたいです。
2021/07/27 追記です。
rvizを立ち上げて、File>Open Config を開き
~/ros_catkin_es/src/myCobotROS/config/mycobot.rviz
を開いたところ、無事rvizにmyCobotのモデルもSliderと連動表示できました。