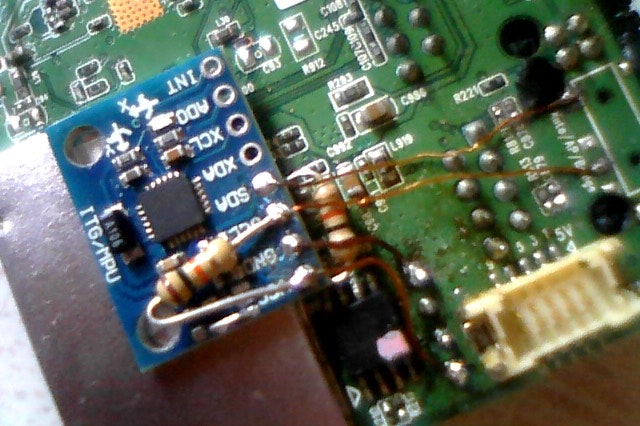
I2Cの加速度センサーのMPU-6050を蟹さんにつないでみました。
もともとpull up抵抗が2.2Kだったのですが、それでは全く認識されなかったので、いろいろ試して10Kにしてみました。
コードはこんな感じです。置く面によってLEDの色が変わります。
蟹さんにはfloatが入ってないので、複雑な計算はできないので、Accelerometer Measurementsの値を閾値で判断しています。
みんなのラズパイコンテスト2019の岩木祐介さんの「時間の使い方ロガー」にインスパイヤーされて作ってみました。
またここのところ不調の蟹さんが、何故かRJ45を上向きにすると調子がよく、それを見ていて思いつきました。