参照資料 : ubuntu22.04_install&operation_PX4編.md 0.5版
格納場所 : TOPPERS Project / hakoniwa-px4sim
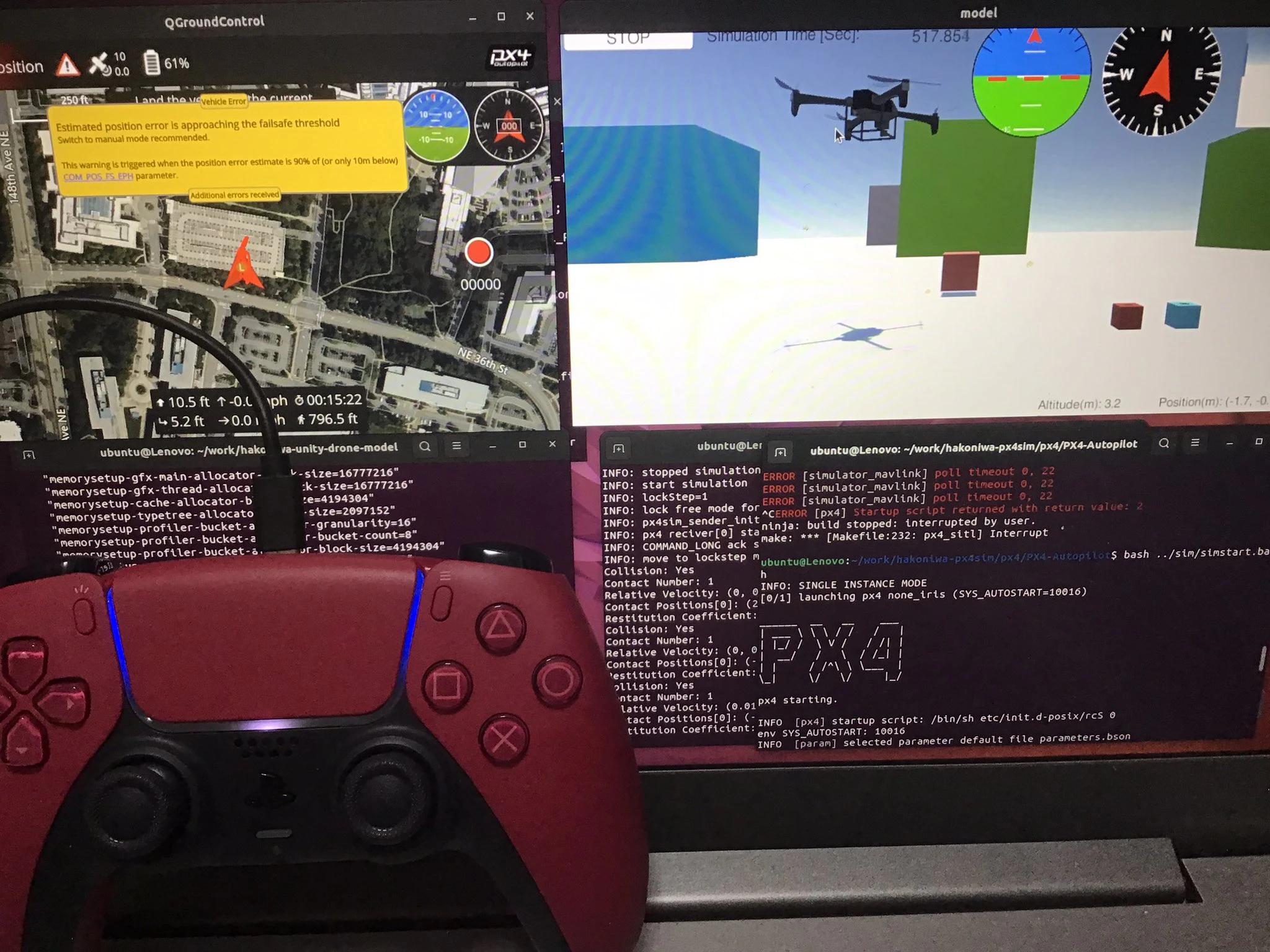
お試し環境は以下の通り。
Core i5 8th/ Memory 8G / intel UHD / Lenovo ideapad
Ubuntu 22.04.4 LTS (Native/Clean install using USB memory/Not Dual boot)
Python 3.10 ( Ubuntu 22.04.4 LTS Pre install )
DualSense Wireless Controller (for PlayStation 5 : PS5)
下の画像のJoyStickの設定に注意かな。動かなくて???となったので。
Enable joystick inputがdefault=disableなのでチェックを入れるとコントローラで操作できるようになる。
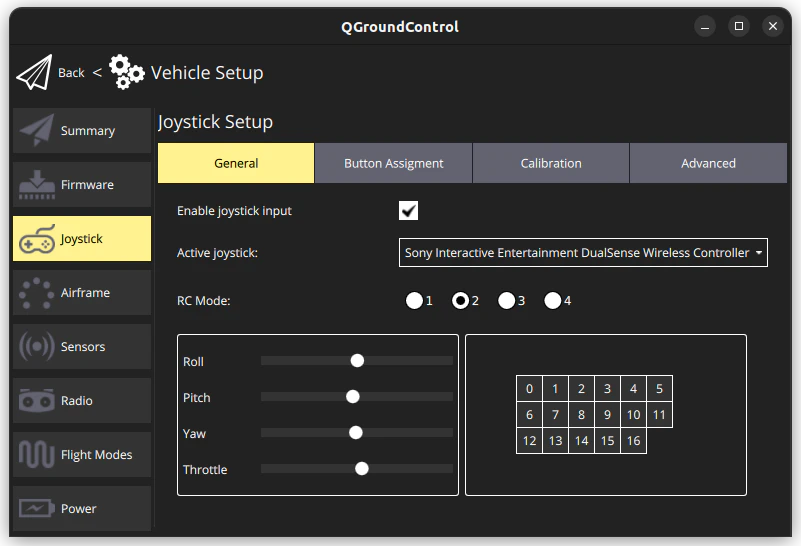
QGroundControlではDUALSHOCK 4をサポートしているがDualSenseの記載はない。
DualSense用のドライバ(USBとBluetooth共に)は特に意識して入れていないけど、認識してJoyStickでdrone操作できた。
動作が緩慢かどうかはわからないけれども、気になることはなかった。
少しでも興味のある方は是非お試しを!Core i5 8th/8G程度のマシンでも動きますので!!
最後に、@kanetugu2018さんに感謝!!
追記 コマンド形式でやってみた. ubuntuのコマンドを使ってみたかっただけ。
# 環境変数の設定.
$ echo 'export LD_LIBRARY_PATH=/usr/local/lib/hakoniwa:$LD_LIBRARY_PATH' >> ~/.bashrc
$ echo 'export PATH=/usr/local/bin/hakoniwa:$PATH' >> ~/.bashrc
$ echo 'export PYTHONPATH=/usr/local/lib/hakoniwa/py:${PYTHONPATH}' >> ~/.bashrc
$ source ~/.bashrc
# DroneAppLinux.zipの入手.
$ cd ~/Downloads
$ wget https://github.com/toppers/hakoniwa-unity-drone-model/releases/download/v2.1.0/DroneAppLinux.zip
# QGroundControlのダウンロード.
$ cd ~/Downloads
$ wget https://d176tv9ibo4jno.cloudfront.net/latest/QGroundControl.AppImage
cmakeがインストールされていない時
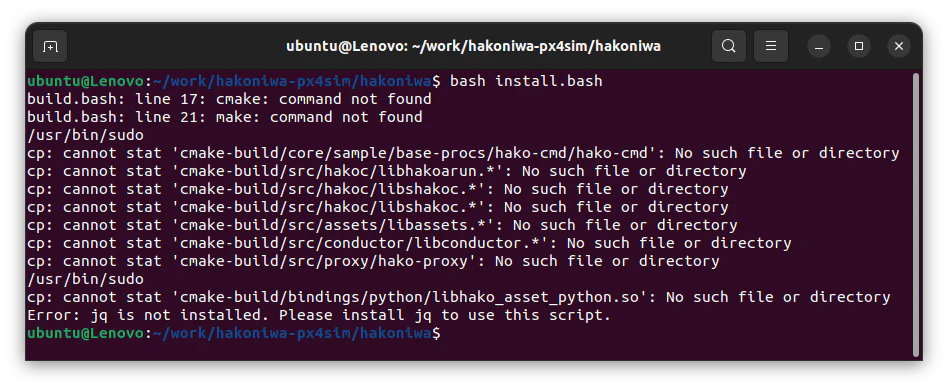
cmakeをインストールするとmakeも一緒にはいるみたい。
gcc, g++がないと
jqが入っていないと
google testが入っていないと
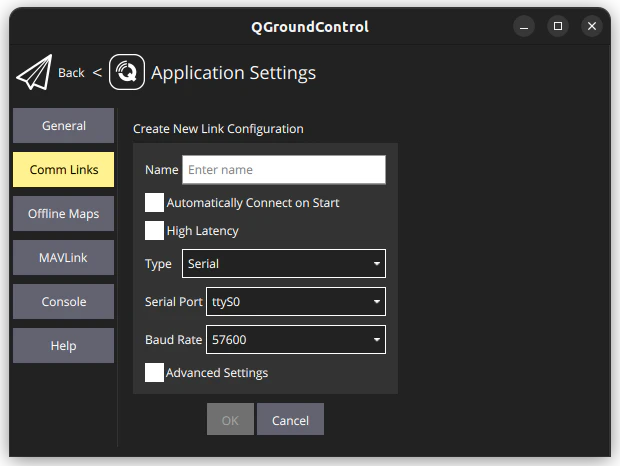
UDPではなく。Serialになっているので。UDPへ要変更