はじめに
TES の複素インピーダンスを勉強していると、文献ごとに少しずつ違う式が出てくる。
たとえば、ある導出では TES 単体のインピーダンスを
Z_{\mathrm{TES}}(\omega)
=
R_0(1+\beta)
+
\frac{
R_0(2+\beta)\mathcal{L}
}{
1-\mathcal{L}+i\omega\tau_0
}
と書く。
一方、Irwin & Hilton では、
Z_{\mathrm{TES}}(\omega)
=
R_0(1+\beta_I)
+
\frac{
R_0\mathcal{L}_I
}{
1-\mathcal{L}_I
}
\frac{
2+\beta_I
}{
1+i\omega\tau_I
}
のように書かれる。
さらに Lindeman et al. 2004 では、$\tau_{\mathrm{eff}}$ を使って、また少し違う形で書かれる。
初めて見ると、
式が違う?
符号が違う?
時定数の定義が違う?
どれが正しい?
と混乱しやすい。
しかし結論から言うと、one-block TES モデルの範囲では、これらは基本的に同じ式である。
違って見える主な理由は、
1. 時定数の定義が違う
2. loop gain の記号が違う
3. フーリエ変換の符号規約が違う
4. TES 単体か、回路全体かが違う
5. f で書くか ω で書くかが違う
6. 低周波端・高周波端で書くか、物理パラメータで直接書くかが違う
というだけである。
この記事では、自分の記事で使う基準式を出発点にして、Irwin & Hilton と Lindeman et al. 2004 の式がどのように同じ形へ変形できるかを整理する。
自分の記事の定義と解説はこちらに書いてます。
この記事の要約
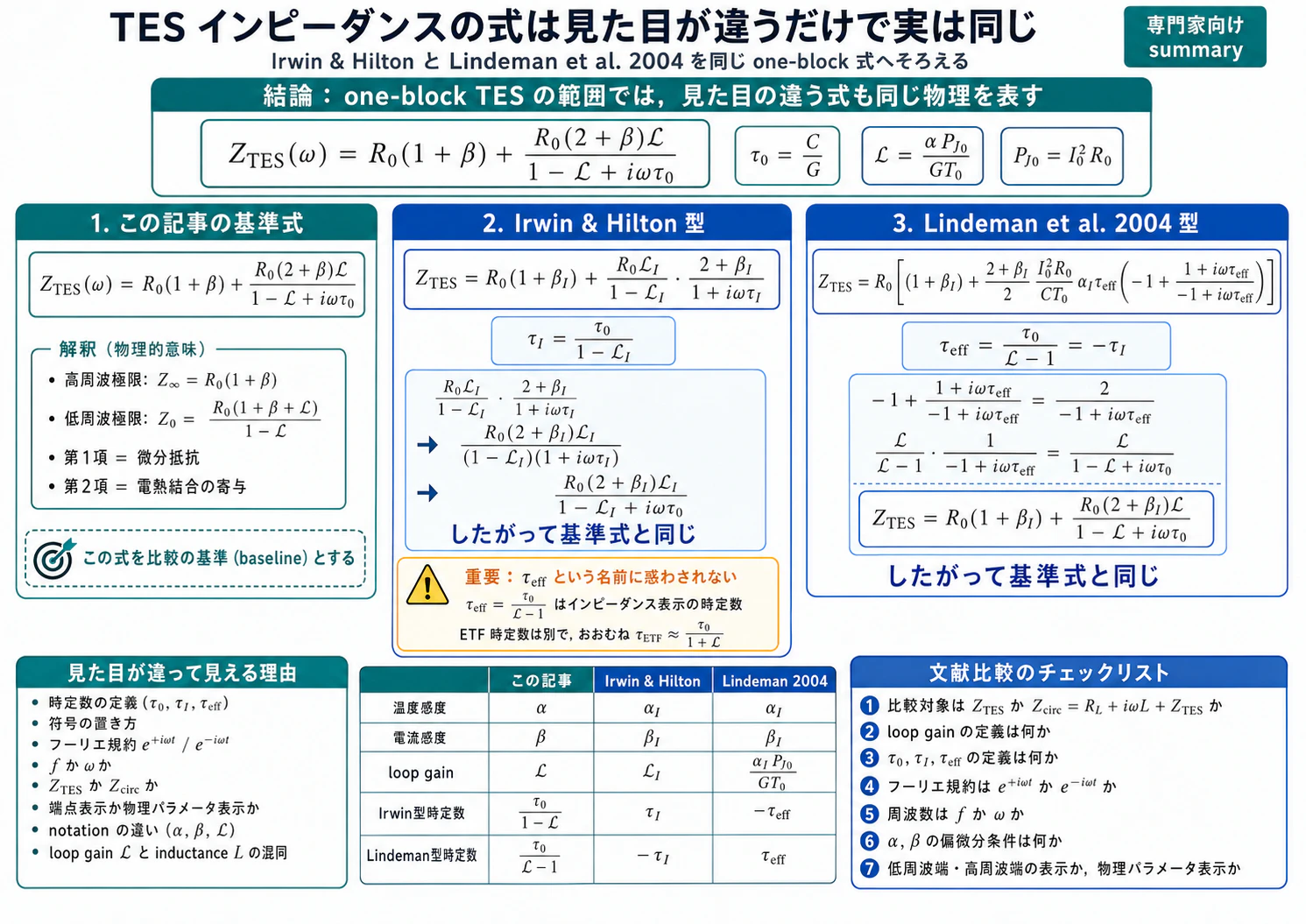
1. この記事で使う基準式
この記事では、one-block TES 単体の小信号インピーダンスを次の形で書く。
\boxed{
Z_{\mathrm{TES}}(\omega)
=
R_0(1+\beta)
+
\frac{
R_0(2+\beta)\mathcal{L}
}{
1-\mathcal{L}+i\omega\tau_0
}
}
ここで、
\tau_0=\frac{C}{G}
は自然熱時定数である。
また、
\mathcal{L}
=
\frac{\alpha P_{J0}}{GT_0}
は loop gain である。
平衡点での Joule power は
P_{J0}=I_0^2R_0
である。
$\alpha$ と $\beta$ は、
\alpha
=
\frac{T_0}{R_0}
\left(
\frac{\partial R}{\partial T}
\right)_{I,0}
\beta
=
\frac{I_0}{R_0}
\left(
\frac{\partial R}{\partial I}
\right)_{T,0}
である。
この式を、この記事では「基準式」と呼ぶ。
回路全体のインピーダンスは、TES 単体に直列抵抗と直列インダクタンスを足して、
Z_{\mathrm{circ}}(\omega)
=
R_L+i\omega L+Z_{\mathrm{TES}}(\omega)
である。
この記事で比較したい中心は、基本的には回路全体 $Z_{\mathrm{circ}}$ ではなく、TES 単体の $Z_{\mathrm{TES}}$ である。
2. 基準式の物理的な意味
基準式は、
Z_{\mathrm{TES}}(\omega)
=
R_0(1+\beta)
+
\frac{
R_0(2+\beta)\mathcal{L}
}{
1-\mathcal{L}+i\omega\tau_0
}
である。
第一項
R_0(1+\beta)
は、高周波極限の微分抵抗である。
高周波では TES 温度が電流変動に追随できないため、熱応答による第 2 項は消える。したがって、
Z_{\mathrm{TES}}(\infty)
=
R_0(1+\beta)
である。
第二項
\frac{
R_0(2+\beta)\mathcal{L}
}{
1-\mathcal{L}+i\omega\tau_0
}
は、電流変動が Joule heating を変え、それが温度を変え、さらに抵抗を変える、という電熱結合の寄与である。
低周波極限では、
Z_{\mathrm{TES}}(0)
=
R_0(1+\beta)
+
\frac{
R_0(2+\beta)\mathcal{L}
}{
1-\mathcal{L}
}
である。
整理すると、
Z_{\mathrm{TES}}(0)
=
R_0
\frac{
1+\beta+\mathcal{L}
}{
1-\mathcal{L}
}
となる。
$\mathcal{L}>1$ では、低周波側で負の動的抵抗が現れる。これは異常ではなく、電圧バイアス TES の強い electrothermal feedback の反映である。
3. Irwin & Hilton の式
Irwin & Hilton では、回路全体の複素インピーダンスを
Z_\omega
=
\frac{V_\omega}{I_\omega}
=
R_L+i\omega L+Z_{\mathrm{TES}}
と書く。
そして、TES 単体の複素インピーダンスを
Z_{\mathrm{TES}}
=
R_0(1+\beta_I)
+
\frac{
R_0\mathcal{L}_I
}{
1-\mathcal{L}_I
}
\frac{
2+\beta_I
}{
1+i\omega\tau_I
}
と書いている。
ここで重要なのは、$\tau_I$ の定義である。
Irwin & Hilton の $\tau_I$ は、
\tau_I
=
\frac{\tau_0}{1-\mathcal{L}_I}
である。
ここで、
\tau_0=\frac{C}{G}
である。
この $\tau_I$ は、いわゆる理想電圧バイアス下の ETF 時定数
\tau_{\mathrm{ETF}}
\simeq
\frac{\tau_0}{1+\mathcal{L}}
とは違う。(ここが最初の重要ポイントである。)
4. Irwin & Hilton の式を基準式に直す
Irwin & Hilton の第 2 項だけを見る。
\frac{
R_0\mathcal{L}_I
}{
1-\mathcal{L}_I
}
\frac{
2+\beta_I
}{
1+i\omega\tau_I
}
これを一つの分数にまとめると、
\frac{
R_0\mathcal{L}_I(2+\beta_I)
}{
(1-\mathcal{L}_I)(1+i\omega\tau_I)
}
である。
ここに
\tau_I
=
\frac{\tau_0}{1-\mathcal{L}_I}
を代入する。
分母は、
(1-\mathcal{L}_I)(1+i\omega\tau_I)
である。
これを展開すると、
(1-\mathcal{L}_I)(1+i\omega\tau_I)
=
(1-\mathcal{L}_I)
+
i\omega(1-\mathcal{L}_I)\tau_I
である。
$\tau_I=\tau_0/(1-\mathcal{L}_I)$ なので、
(1-\mathcal{L}_I)\tau_I
=
\tau_0
となる。
したがって、
(1-\mathcal{L}_I)(1+i\omega\tau_I)
=
1-\mathcal{L}_I+i\omega\tau_0
である。
よって、
\frac{
R_0\mathcal{L}_I
}{
1-\mathcal{L}_I
}
\frac{
2+\beta_I
}{
1+i\omega\tau_I
}
=
\frac{
R_0\mathcal{L}_I(2+\beta_I)
}{
1-\mathcal{L}_I+i\omega\tau_0
}
である。
したがって、Irwin & Hilton の式は、
Z_{\mathrm{TES}}
=
R_0(1+\beta_I)
+
\frac{
R_0(2+\beta_I)\mathcal{L}_I
}{
1-\mathcal{L}_I+i\omega\tau_0
}
となる。
これは、この記事の基準式
Z_{\mathrm{TES}}
=
R_0(1+\beta)
+
\frac{
R_0(2+\beta)\mathcal{L}
}{
1-\mathcal{L}+i\omega\tau_0
}
と同じである。
つまり、
\beta_I\leftrightarrow\beta,
\qquad
\mathcal{L}_I\leftrightarrow\mathcal{L}
と読めばよい。
5. Irwin & Hilton 式が違って見える理由
Irwin & Hilton の式が違って見える主な理由は、
\tau_I
=
\frac{\tau_0}{1-\mathcal{L}}
を使っているからである。
つまり、自然熱時定数 $\tau_0=C/G$ を明示する代わりに、
\tau_I
という別の時定数で書いている。
そのため、
\frac{1}{1-\mathcal{L}}
\frac{1}{1+i\omega\tau_I}
のように見える。
しかし、分母を一つにまとめれば、
1-\mathcal{L}+i\omega\tau_0
になり、基準式と同じになる。
したがって、Irwin & Hilton の式は、
見た目は違うが、時定数の定義を戻せば同じ
である。
6. Lindeman et al. 2004 の式
Lindeman et al. 2004 では、TES 抵抗を小信号で
R
=
R_0
\left(
1+\alpha_I\frac{T}{T_0}
+\beta_I\frac{I}{I_0}
\right)
のように線形化する。
ここで $\alpha_I$ と $\beta_I$ は、それぞれ
αI:
電流 I を固定した温度微分
βI:
温度 T を固定した電流微分
に対応する。
Lindeman et al. 2004 の TES インピーダンス式は、一見すると基準式とはかなり違って見える。この記事の記法に寄せて書くと、概念的には
Z_{\mathrm{TES}}
=
R_0
\left[
(1+\beta_I)
+
\frac{2+\beta_I}{2}
\frac{I_0^2R_0}{CT_0}
\alpha_I
\tau_{\mathrm{eff}}
\left(
-1
+
\frac{1+i\omega\tau_{\mathrm{eff}}}
{-1+i\omega\tau_{\mathrm{eff}}}
\right)
\right]
のような形である。
ここで、
\tau_{\mathrm{eff}}
=
\left(
\frac{I_0^2R_0}{CT_0}\alpha_I
-
\frac{G}{C}
\right)^{-1}
である。
この式は見た目がかなり違う。
しかし、これも同じ式である。
7. Lindeman の tau_eff を loop gain で書く
まず、
P_{J0}=I_0^2R_0
である。
loop gain は
\mathcal{L}
=
\frac{\alpha_I P_{J0}}{GT_0}
=
\frac{\alpha_I I_0^2R_0}{GT_0}
である。
したがって、
\frac{I_0^2R_0}{CT_0}\alpha_I
=
\frac{\mathcal{L}G}{C}
である。
また、
\tau_0=\frac{C}{G}
なので、
\frac{G}{C}
=
\frac{1}{\tau_0}
である。
よって、Lindeman の $\tau_{\mathrm{eff}}$ は
\tau_{\mathrm{eff}}
=
\left(
\frac{\mathcal{L}G}{C}
-
\frac{G}{C}
\right)^{-1}
である。
整理すると、
\tau_{\mathrm{eff}}
=
\left(
\frac{G}{C}
(\mathcal{L}-1)
\right)^{-1}
したがって、
\boxed{
\tau_{\mathrm{eff}}
=
\frac{\tau_0}{\mathcal{L}-1}
}
である。
これは Irwin & Hilton の
\tau_I
=
\frac{\tau_0}{1-\mathcal{L}}
とは符号が反対である。
つまり、
\tau_{\mathrm{eff}}
=
-\tau_I
である。
ここが、Lindeman 式が違って見える最大の理由である。
8. Lindeman の括弧を簡単化する
Lindeman 式に出てくる括弧
-1
+
\frac{1+i\omega\tau_{\mathrm{eff}}}
{-1+i\omega\tau_{\mathrm{eff}}}
を整理する。
$x=\omega\tau_{\mathrm{eff}}$ と置くと、
-1+\frac{1+ix}{-1+ix}
=
\frac{-(-1+ix)+(1+ix)}{-1+ix}
である。
分子は、
-(-1+ix)+(1+ix)
=
1-ix+1+ix
=
2
なので、
-1+\frac{1+ix}{-1+ix}
=
\frac{2}{-1+ix}
である。
したがって、
-1
+
\frac{1+i\omega\tau_{\mathrm{eff}}}
{-1+i\omega\tau_{\mathrm{eff}}}
=
\frac{
2
}{
-1+i\omega\tau_{\mathrm{eff}}
}
である。
9. Lindeman 式を基準式に直す
Lindeman 式の第 2 項は、
R_0
\frac{2+\beta_I}{2}
\frac{I_0^2R_0}{CT_0}
\alpha_I
\tau_{\mathrm{eff}}
\left(
-1
+
\frac{1+i\omega\tau_{\mathrm{eff}}}
{-1+i\omega\tau_{\mathrm{eff}}}
\right)
である。
先ほどの結果を使うと、
\left(
-1
+
\frac{1+i\omega\tau_{\mathrm{eff}}}
{-1+i\omega\tau_{\mathrm{eff}}}
\right)
=
\frac{2}{-1+i\omega\tau_{\mathrm{eff}}}
なので、第 2 項は
R_0
(2+\beta_I)
\frac{I_0^2R_0}{CT_0}
\alpha_I
\tau_{\mathrm{eff}}
\frac{1}{-1+i\omega\tau_{\mathrm{eff}}}
となる。
次に、
\frac{I_0^2R_0}{CT_0}\alpha_I
=
\frac{\mathcal{L}}{\tau_0}
であり、
\tau_{\mathrm{eff}}
=
\frac{\tau_0}{\mathcal{L}-1}
なので、
\frac{I_0^2R_0}{CT_0}\alpha_I
\tau_{\mathrm{eff}}
=
\frac{\mathcal{L}}{\tau_0}
\frac{\tau_0}{\mathcal{L}-1}
=
\frac{\mathcal{L}}{\mathcal{L}-1}
である。
したがって、第 2 項は
R_0(2+\beta_I)
\frac{\mathcal{L}}{\mathcal{L}-1}
\frac{1}{-1+i\omega\tau_{\mathrm{eff}}}
となる。
ここで、
\tau_{\mathrm{eff}}
=
\frac{\tau_0}{\mathcal{L}-1}
なので、
(\mathcal{L}-1)(-1+i\omega\tau_{\mathrm{eff}})
=
-(\mathcal{L}-1)+i\omega\tau_0
=
1-\mathcal{L}+i\omega\tau_0
である。
したがって、
\frac{\mathcal{L}}{\mathcal{L}-1}
\frac{1}{-1+i\omega\tau_{\mathrm{eff}}}
=
\frac{
\mathcal{L}
}{
1-\mathcal{L}+i\omega\tau_0
}
である。
よって、Lindeman 型の式は、
Z_{\mathrm{TES}}
=
R_0(1+\beta_I)
+
\frac{
R_0(2+\beta_I)\mathcal{L}
}{
1-\mathcal{L}+i\omega\tau_0
}
となる。
これは基準式と同じである。
10. Lindeman 式が違って見える理由
Lindeman 式が違って見える理由は、主に次の 3 つである。
1. τeff = τ0/(L - 1) を使っている
2. -1 + (1+iωτeff)/(-1+iωτeff) という形で書いている
3. loop gain を明示せず、αI, I0, R0, C, T0, G で書いている
特に重要なのは、
\tau_{\mathrm{eff}}
=
\frac{\tau_0}{\mathcal{L}-1}
である。
これは、Irwin & Hilton の
\tau_I
=
\frac{\tau_0}{1-\mathcal{L}}
と符号が反対である。
そのため、式の見た目がかなり違って見える。
しかし、
\tau_{\mathrm{eff}}
=
-\tau_I
と理解すれば、同じ物理を違う向きから書いているだけである。
11. 2つの式を並べる
ここまでの結果を並べる。
11.1 この記事の基準式
Z_{\mathrm{TES}}
=
R_0(1+\beta)
+
\frac{
R_0(2+\beta)\mathcal{L}
}{
1-\mathcal{L}+i\omega\tau_0
}
11.2 Irwin & Hilton 型
Z_{\mathrm{TES}}
=
R_0(1+\beta_I)
+
\frac{
R_0\mathcal{L}_I
}{
1-\mathcal{L}_I
}
\frac{
2+\beta_I
}{
1+i\omega\tau_I
}
ただし、
\tau_I
=
\frac{\tau_0}{1-\mathcal{L}_I}
である。
したがって、基準式と同じ。
11.3 Lindeman et al. 2004 型
Z_{\mathrm{TES}}
=
R_0
\left[
(1+\beta_I)
+
\frac{2+\beta_I}{2}
\frac{I_0^2R_0}{CT_0}
\alpha_I
\tau_{\mathrm{eff}}
\left(
-1
+
\frac{1+i\omega\tau_{\mathrm{eff}}}
{-1+i\omega\tau_{\mathrm{eff}}}
\right)
\right]
ただし、
\tau_{\mathrm{eff}}
=
\frac{\tau_0}{\mathcal{L}-1}
である。
したがって、基準式と同じ。
12. 変換表
| 量 | この記事 | Irwin & Hilton | Lindeman et al. 2004 |
|---|---|---|---|
| TES 抵抗 | $R_0$ | $R_0$ | $R_0$ |
| 温度感度 | $\alpha$ | $\alpha_I$ | $\alpha_I$ |
| 電流感度 | $\beta$ | $\beta_I$ | $\beta_I$ |
| loop gain | $\mathcal{L}$ | $\mathcal{L}_I$ | 明示せず $\alpha_I P_{J0}/GT_0$ |
| 自然時定数 | $\tau_0=C/G$ | $\tau$ または $\tau_0$ 相当 | $\tau_0$ 相当 |
| Irwin 型の時定数 | $\tau_0/(1-\mathcal{L})$ | $\tau_I$ | $-\tau_{\mathrm{eff}}$ |
| Lindeman 型の時定数 | $\tau_0/(\mathcal{L}-1)$ | $-\tau_I$ | $\tau_{\mathrm{eff}}$ |
| 高周波極限 | $R_0(1+\beta)$ | $R_0(1+\beta_I)$ | $R_0(1+\beta_I)$ |
| 回路全体 | $R_L+i\omega L+Z_{\mathrm{TES}}$ | $R_L+i\omega L+Z_{\mathrm{TES}}$ | $R_{\rm Th}+i2\pi fL+Z_{\mathrm{TES}}$ |
13. なぜ時定数の符号が違うのか
最も混乱しやすいのは、
\tau_I
=
\frac{\tau_0}{1-\mathcal{L}}
と
\tau_{\mathrm{eff}}
=
\frac{\tau_0}{\mathcal{L}-1}
である。
これらは、
\tau_{\mathrm{eff}}
=
-\tau_I
という関係にある。
なぜこのような違いが出るのか。
それは、分母を
1-\mathcal{L}+i\omega\tau_0
と書くか、
\mathcal{L}-1-i\omega\tau_0
と書くかの違いである。
たとえば、
1-\mathcal{L}+i\omega\tau_0
=
-(\mathcal{L}-1-i\omega\tau_0)
である。
このマイナスを、係数側に持っていくか、時定数側に持っていくかで、見た目が変わる。
特に、$\mathcal{L}>1$ の典型的な TES 動作点では、
1-\mathcal{L}<0
である。
そのため、
\tau_I=\frac{\tau_0}{1-\mathcal{L}}
は負になる。
一方、
\tau_{\mathrm{eff}}=\frac{\tau_0}{\mathcal{L}-1}
は正になる。
どちらを使うかは、数学的な整理の仕方の違いである。
14. ただし ETF 時定数とは混同しない
ここで非常に重要な注意がある。
\tau_I
=
\frac{\tau_0}{1-\mathcal{L}}
や
\tau_{\mathrm{eff}}
=
\frac{\tau_0}{\mathcal{L}-1}
は、インピーダンス式の中に現れる極の書き方である。
一方、理想電圧バイアス下での熱応答の有効時定数は、
\tau_{\mathrm{ETF}}
=
\frac{
\tau_0
}{
1+\mathcal{L}/(1+\beta)
}
である。
$\beta=0$ なら、
\tau_{\mathrm{ETF}}
=
\frac{\tau_0}{1+\mathcal{L}}
である。
したがって、
1-\mathcal{L}
が出てくる時定数と、
1+\mathcal{L}
が出てくる ETF 時定数を混同してはいけない。
同じ TES の話をしているが、課している条件が違う。
インピーダンスは、
Z(\omega)=\frac{\delta V}{\delta I}
を求める問題である。
一方、理想電圧バイアス下の ETF 時定数は、
\delta V_{\mathrm{TES}}=0
を課して温度がどう戻るかを見る問題である。
条件が違うので、出てくる分母も違う。
15. フーリエ規約でも虚部の符号は変わる
この記事では、時間依存性を
e^{+i\omega t}
としている。
この規約では、
\frac{d}{dt}
\rightarrow
i\omega
である。
しかし、文献によっては
e^{-i\omega t}
を使う。
その場合、
\frac{d}{dt}
\rightarrow
-i\omega
である。
したがって、式の中の
+i\omega\tau
が、
-i\omega\tau
に変わる。
これは物理の違いではなく、フーリエ変換の符号規約の違いである。
Nyquist plot では、虚部の符号が上下反転して見えることがある。
したがって、文献間で虚部の符号が違って見えるときは、まず
フーリエ規約が違うのではないか
を確認する必要がある。
16. f と omega の違い
もう一つよくある違いは、周波数を $f$ で書くか、角周波数 $\omega$ で書くかである。
両者の関係は、
\omega=2\pi f
である。
したがって、
i\omega\tau_0
は、
i2\pi f\tau_0
である。
また、
f_{\mathrm{nat}}
=
\frac{1}{2\pi\tau_0}
=
\frac{G}{2\pi C}
を使うと、
i\omega\tau_0
=
i\frac{f}{f_{\mathrm{nat}}}
と書ける。
そのため、文献によっては
1-\mathcal{L}+i\omega\tau_0
ではなく、
1-\mathcal{L}+i\frac{f}{f_{\mathrm{nat}}}
のように書くことがある。
これも同じ式である。
17. TES 単体か、回路全体か
文献を読むときには、今見ている式が
Z_{\mathrm{TES}}
なのか、
Z_{\mathrm{circ}}
なのかを必ず確認する必要がある。
TES 単体なら、
Z_{\mathrm{TES}}
=
R_0(1+\beta)
+
\frac{
R_0(2+\beta)\mathcal{L}
}{
1-\mathcal{L}+i\omega\tau_0
}
である。
一方、回路全体なら、
Z_{\mathrm{circ}}
=
R_L+i\omega L+Z_{\mathrm{TES}}
である。
ここで $R_L$ は有効な直列抵抗、$L$ は SQUID 入力コイルや配線などのインダクタンスを含む。
実験で最初に得るのは、しばしば $Z_{\mathrm{circ}}$ または $Z_{\mathrm{obs}}$ である。
そこから TES 単体の $Z_{\mathrm{TES}}$ を議論するには、
直列抵抗
直列インダクタンス
読み出し系の transfer function
を切り分ける必要がある。
したがって、
半円が見えない
高周波で直線的に上がる
虚部が大きい
という場合、それは TES の式が間違っているのではなく、回路全体を見ている可能性がある。
18. alpha_I, beta_I の添字 I の意味
Irwin & Hilton や Lindeman では、
\alpha_I,
\qquad
\beta_I
のように添字 $I$ をつける。
これは、偏微分の条件を明確にするためである。
たとえば、
\alpha_I
=
\frac{T_0}{R_0}
\left(
\frac{\partial R}{\partial T}
\right)_{I}
である。
つまり、電流 $I$ を固定して温度微分を取る。
また、
\beta_I
=
\frac{I_0}{R_0}
\left(
\frac{\partial R}{\partial I}
\right)_{T}
である。
つまり、温度 $T$ を固定して電流微分を取る。
この記事では簡単のために、
\alpha,\quad \beta
と書いているが、意味としては
\alpha=\alpha_I,
\qquad
\beta=\beta_I
である。
文献によっては、電圧一定の条件で定義した $\alpha_V,\beta_V$ のような量が登場することもある。
したがって、添字は単なる飾りではなく、
どの変数を固定した偏微分か
を示している。
19. P_0 と P_J0 の違い
文献によっては、平衡点の power を
P_0
と書くことがある。
しかし、この記事では誤解を避けるために、
P_{J0}
と書く。
これは、平衡点での Joule power であることを明確にするためである。
P_{J0}=I_0^2R_0
である。
TES には、Joule power 以外にも、光入力や X 線入力などの外部 power が入り得る。
したがって、
P_0
とだけ書くと、
Joule power なのか
total power なのか
external power なのか
が曖昧になることがある。
インピーダンス導出で loop gain に入るのは、通常
P_{J0}
である。
20. loop gain の記号 L とインダクタンス L
TES の文献では、loop gain を
L
と書くことがある。
しかし、電気回路にはインダクタンス
L
も出てくる。
そのため、この記事では混乱を避けるために、loop gain を
\mathcal{L}
と書く。
つまり、
L:
インダクタンス
\mathcal{L}:
loop gain
である。
文献によっては、両方を $L$ と書いている場合があるので注意が必要である。
21. なぜ同じ式にいろいろなバリエーションがあるのか
同じ式に複数の見た目がある理由をまとめる。
21.1 解析したいものが違う
電気回路の安定性を見たいときには、
\tau_I=\frac{\tau_0}{1-\mathcal{L}}
のような形が便利である。
Nyquist plot の半円を見たいときには、
Z_{\mathrm{TES}}
=
Z_\infty
+
(Z_0-Z_\infty)
\frac{1}{1-i\omega\tau_{\mathrm{eff}}}
のような端点表示が便利である。
実験データを fit したいときには、
Z_{\mathrm{circ}}
=
R_L+i\omega L+Z_{\mathrm{TES}}
と書く方が便利である。
したがって、どの形がよいかは、何を見たいかによって変わる。
21.2 正の時定数を使いたい
典型的な TES 動作点では、
\mathcal{L}>1
であることが多い。
このとき、
\tau_I=\frac{\tau_0}{1-\mathcal{L}}
は負になる。
負の時定数は、かなり分かりにくい。
そこで、
\tau_{\mathrm{eff}}=\frac{\tau_0}{\mathcal{L}-1}
のように正の量を使って式を書くことがある。
ただし、その場合は分母や符号の見た目が変わる。
21.3 Nyquist plot の端点で書きたい
複素平面上では、one-block インピーダンスは半円を描く。
そのため、
Z_0:
低周波端
Z_\infty:
高周波端
を使うと、幾何学的に理解しやすい。
この場合、
Z_{\mathrm{TES}}
=
Z_\infty
+
(Z_0-Z_\infty)
\frac{1}{1-i\omega\tau_{\mathrm{eff}}}
のような書き方になる。
これは、Lindeman 型の $\tau_{\mathrm{eff}}$ を使えば容易に得られる表示である。
21.4 フーリエ規約が違う
時間依存性を
e^{+i\omega t}
とするか、
e^{-i\omega t}
とするかで、虚部の符号が変わる。
このため、同じ物理でも Nyquist plot が上下反転して見えることがある。
21.5 f を使うか omega を使うか
周波数を $f$ で書くと、
i\omega\tau_0
=
i2\pi f\tau_0
である。
さらに、
f_{\mathrm{nat}}=\frac{1}{2\pi\tau_0}
を使うと、
i\omega\tau_0
=
i\frac{f}{f_{\mathrm{nat}}}
と書ける。
したがって、$2\pi$ が見えたり見えなかったりする。
22. すべては同じ one-block 小信号理論から来ている
ここまでの式は、すべて one-block TES の小信号方程式から出てくる。
電気方程式は概念的に、
L\frac{dI}{dt}
=
V
-
IR_L
-
IR(T,I)
である。
熱方程式は、
C\frac{dT}{dt}
=
P_J
-
P_{\mathrm{bath}}(T)
である。
これを平衡点まわりで線形化する。
I=I_0+\delta I
T=T_0+\delta T
R=R_0+\delta R
TES 抵抗の線形化は、
\frac{\delta R}{R_0}
=
\alpha\frac{\delta T}{T_0}
+
\beta\frac{\delta I}{I_0}
である。
Joule power の線形化は、
\delta P_J
=
P_{J0}(2+\beta)\frac{\delta I}{I_0}
+
P_{J0}\alpha\frac{\delta T}{T_0}
である。
そこから、
\left[
G(1-\mathcal{L})+i\omega C
\right]\delta T
=
P_{J0}(2+\beta)\frac{\delta I}{I_0}
が得られる。
これを解くと、
\frac{\delta T}{\delta I}
=
\frac{
P_{J0}(2+\beta)/I_0
}{
G(1-\mathcal{L})+i\omega C
}
である。
そして電気方程式から、
Z_{\mathrm{TES}}
=
R_0(1+\beta)
+
\frac{I_0R_0\alpha}{T_0}
\frac{\delta T}{\delta I}
となる。
これに代入すれば、
Z_{\mathrm{TES}}
=
R_0(1+\beta)
+
\frac{
R_0(2+\beta)\mathcal{L}
}{
1-\mathcal{L}+i\omega\tau_0
}
である。
この一つの式を、どの変数で整理するかによって、Irwin & Hilton 型、Lindeman 型、端点表示型に分かれて見えるだけである。
23. 混乱しやすいポイント
最後に、混乱しやすい点を整理する。
23.1 Z_TES と Z_circ を混同する
TES 単体は、
Z_{\mathrm{TES}}
である。
回路全体は、
Z_{\mathrm{circ}}
=
R_L+i\omega L+Z_{\mathrm{TES}}
である。
実験で測ったものがどちらなのかを確認する。
23.2 $\tau_I$ と $\tau_{\mathrm{ETF}}$ を混同する
\tau_I
=
\frac{\tau_0}{1-\mathcal{L}}
と
\tau_{\mathrm{ETF}}
=
\frac{
\tau_0
}{
1+\mathcal{L}/(1+\beta)
}
は別物である。
前者はインピーダンス式の極の書き方に関係する。
後者は理想電圧バイアス下の温度戻りに関係する。
23.3 tau_eff という名前に惑わされる
Lindeman et al. 2004 で出てくる
\tau_{\mathrm{eff}}
=
\frac{\tau_0}{\mathcal{L}-1}
は、名前だけ見ると ETF 時定数のように見える。
しかし、ここでの $\tau_{\mathrm{eff}}$ は、インピーダンス表示で使う時定数であり、
\tau_{\mathrm{ETF}}
とは違う。
23.4 虚部の符号に惑わされる
フーリエ規約が違えば、虚部の符号は反転する。
Nyquist plot が上下逆に見えても、すぐに物理が違うとは判断しない。
23.5 L が loop gain なのか inductance なのかを混同する
文献によっては、loop gain も inductance も $L$ と書かれていることがある。
この記事では、
\mathcal{L}:
loop gain
L:
inductance
と区別している。
24. まとめ
TES one-block インピーダンスは、文献ごとにいろいろな形で書かれる。
しかし、基本となる式は
\boxed{
Z_{\mathrm{TES}}(\omega)
=
R_0(1+\beta)
+
\frac{
R_0(2+\beta)\mathcal{L}
}{
1-\mathcal{L}+i\omega\tau_0
}
}
である。
Irwin & Hilton の式は、
\tau_I=\frac{\tau_0}{1-\mathcal{L}}
を使っているだけで、基準式と同じである。
Lindeman et al. 2004 の式は、
\tau_{\mathrm{eff}}=\frac{\tau_0}{\mathcal{L}-1}
を使い、括弧を少し複雑な形で書いているだけで、基準式と同じである。
違って見える理由は、
時定数の定義
符号の置き方
フーリエ規約
f と ω の違い
TES 単体か回路全体か
端点表示か物理パラメータ表示か
notation の違い
である。
したがって、文献間で TES インピーダンスの式を比較するときには、まず次を確認するとよい。
1. Z_TES か Z_circ か
2. loop gain の定義は何か
3. τ0, τI, τeff の定義は何か
4. フーリエ規約は e^{+iωt} か e^{-iωt} か
5. 周波数は f か ω か
6. α, β の偏微分条件は何か
7. 低周波端・高周波端で書いているのか
これらをそろえると、見た目が違う式は、実は同じ one-block TES インピーダンスを表していることが分かる。
式の見た目に惑わされるよりも、
どの変数を固定し、
どの変数を揺らし、
どの応答を見ているのか
を意識することが重要である。
参考文献
- K. D. Irwin and G. C. Hilton, “Transition-Edge Sensors,” in Cryogenic Particle Detection, Topics in Applied Physics, 2005.
- M. A. Lindeman, S. Bandler, R. P. Brekosky, J. A. Chervenak, E. Figueroa-Feliciano, F. M. Finkbeiner, M. J. Li, and C. A. Kilbourne, “Impedance measurements and modeling of a transition-edge-sensor calorimeter,” Review of Scientific Instruments, 75, 1283--1289, 2004.
関連記事