*本ポストは 先に投稿した英文 の和訳です。
はじめに
こんにちは。Qiitaでのはじめてのポストです。モンテカルロ木探索(Monte Carlo Tree Search: MCTS)を、簡単な数式を解く問題に適用した例をご説明したいと思います。モンテカルロ木探索を、碁とか将棋とかオセロとか以外の問題に、簡単に適用してみたい方もいらっしゃるかと思いますが、本ポストはそういった方々へのものです。またできれば今後、応用例も投稿できればと思っています。
モンテカルロ木探索について
モンテカルロ木探索ですが、コンピューター碁プログラム(AlphaGoなど)で有名になった探索アルゴリズムです。このポストでは、単純な多変数関数を解くことに使ってみたいと思います。
モンテカルロ木探索はルートノードから初めて、次のような4ステップを辿ります。
1.注目ノードの選択
2.注目ノードの子ノード展開
3.適当にサーチ
4.バックプロパゲーション
これに沿って、問題を設定します。
問題の例
例として、次の形の多変数関数の最小値をMCTSによって求めることを考えます。
y = f(x) = (x_1 - a)^2 + (x_2 - b)^2 + (x_3 - c)^2 + (x_4 -d)^2
一般にMCTSを適用したいような問題では、 f(x) の形はよく分からず、アクションに対する報酬としての関係のみが得られるものと考えられますが、ここではf(x)の形から、(x1, x2, x3, x4) = (a, b, c, d)で最小値をとることが分かっています。
MCTSにこの最小値を見つけさせるために、xについての離散的なアクションを次のように定義します。
- x1 に 1 を加える
- x1 を 1 減らす
- x2 に 1 を加える
- x2 を 1 減らす
- ...
Xの任意の初期値からスタートし、アクションを繰り返すと、アクションの系列 (x1:+1, x2:-1, ....) となります。MCTSは、アクションの系列に対する累積報酬を最大化するように学習を進めます。
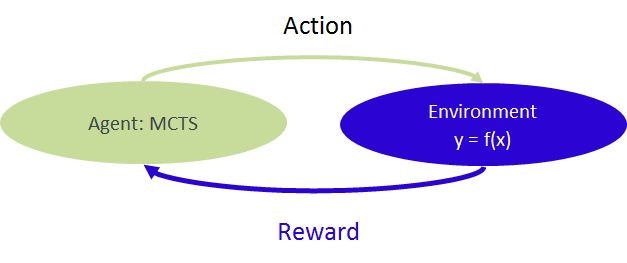
強化学習
解を求めるプロセスを強化学習の形に表現します。この場合 $y=f(x)$ が環境に相当し、MCTSエージェントからアクションを受け取って報酬を返します。
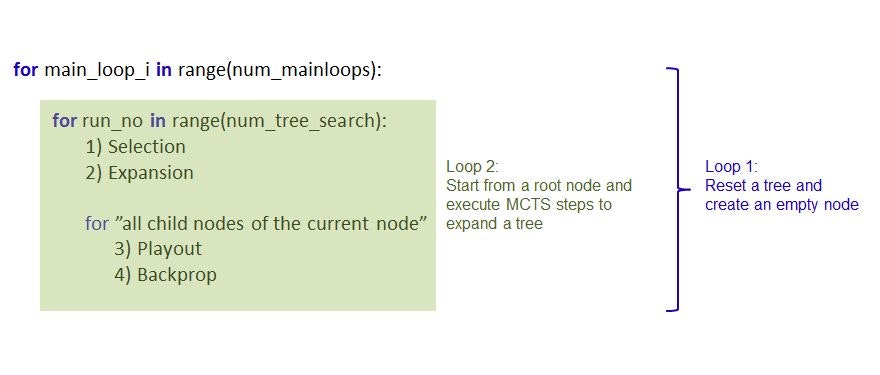
コードの概略
以下に掲載するコードの主要部分は以下の構造を持ちます。MCTSは確率的であるため、真の最小値にたどり着かない可能性もあります。このためツリーの生成を複数回行い、最小値にたどり着きやすいようにしています。最終的には、最も良い結果が返り値として表示されます。
ソフトウェアのバージョン
- Python 3.5.2
- Numpy 1.14.2+mkl
Code
from math import *
from copy import copy
import numpy as np
import random
class environment:
def __init__(self):
self.a = 0.
self.b = 2.
self.c = 1.
self.d = 2.
self.x1 = -12.
self.x2 = 14.
self.x3 = -13.
self.x4 = 9.
self.f = self.func()
def func(self):
return (self.x1 - self.a)**2+(self.x2 - self.b)**2+(self.x3 - self.c)**2+(self.x4 - self.d)**2
def step(self, action):
f_before = self.func()
if action == 1:
self.x1 += 1.
elif action == -1:
self.x1 -= 1.
elif action == 2:
self.x2 += 1.
elif action == -2:
self.x2 -= 1.
elif action == 3:
self.x3 += 1.
elif action == -3:
self.x3 -= 1.
elif action == 4:
self.x4 += 1.
elif action == -4:
self.x4 -= 1.
f_after = self.func()
if f_after == 0:
reward = 100
terminal = True
else:
reward = 1 if abs(f_before) - abs(f_after) > 0 else -1
terminal = False
return f_after, reward, terminal, [self.x1, self.x2, self.x3, self.x4]
def action_space(self):
return [-4, -3, -2, -1, 0, 1, 2, 3, 4]
def sample(self):
return np.random.choice([-4, -3, -2, -1, 0, 1, 2, 3, 4])
class Node():
def __init__(self, parent, action):
self.num_visits = 1
self.reward = 0.
self.children = []
self.parent = parent
self.action = action
def update(self, reward):
self.reward += reward
self.visits += 1
def __repr__(self):
s="Reward/Visits = %.1f/%.1f (Child %d)"%(self.reward, self.num_visits, len(self.children))
return s
def ucb(node):
return node.reward / node.num_visits + sqrt(log(node.parent.num_visits)/node.num_visits)
def reward_rate(node):
return node.reward / node.num_visits
SHOW_INTERMEDIATE_RESULTS = False
env = environment()
num_mainloops = 20
max_playout_depth = 5
num_tree_search = 180
best_sum_reward = -inf
best_acdtion_sequence = []
best_f = 0
best_x = []
for _ in range(num_mainloops):
root = Node(None, None)
for run_no in range(num_tree_search):
env_copy = copy(env)
terminal = False
sum_reward = 0
# 1) Selection
current_node = root
while len(current_node.children) != 0:
current_node = max(current_node.children, key = ucb)
_, reward, terminal, _ = env_copy.step(current_node.action)
sum_reward += reward
# 2) Expansion
if not terminal:
possible_actions = env_copy.action_space()
current_node.children = [Node(current_node, action) for action in possible_actions]
# Routine for each children hereafter
for c in current_node.children:
# 3) Playout
env_playout = copy(env_copy)
sum_reward_playout = 0
action_sequence = []
_, reward, terminal, _ = env_playout.step(c.action)
sum_reward_playout += reward
action_sequence.append(c.action)
while not terminal:
action = env_copy.sample()
_, reward, terminal, _ = env_playout.step(action)
sum_reward_playout += reward
action_sequence.append(action)
if len(action_sequence) > max_playout_depth:
break
if terminal:
print("Terminal reached during a playout. #########")
# 4) Backpropagate
c_ = c
while c_:
c_.num_visits +=1
c_.reward += sum_reward + sum_reward_playout
c_ = c_.parent
#Decision
current_node = root
action_sequence = []
sum_reward = 0
env_copy = copy(env)
while len(current_node.children) != 0:
current_node = max(current_node.children, key = reward_rate)
action_sequence.append(current_node.action)
for action in action_sequence:
_, reward, terminal, _ = env_copy.step(action)
sum_reward += reward
if terminal:
break
f, _, _, x = env_copy.step(0)
if SHOW_INTERMEDIATE_RESULTS == True:
print("Action sequence: ", str(action_sequence))
print("Sum_reward: ", str(sum_reward))
print("f, x (original): ", env.f , str([env.x1, env.x2]))
print("f, x (after MCT): ", str(f), str(x) )
print("----------")
if sum_reward > best_sum_reward:
best_sum_reward = sum_reward
best_action_sequence = action_sequence
best_f = f
best_x = x
print("Best Action sequence: ", str(best_action_sequence))
print("Action sequence length: ", str(len(best_action_sequence)))
print("Best Sum_reward: ", str(best_sum_reward))
print("f, x (original): ", env.f , str([env.x1, env.x2, env.x3, env.x4]))
print("f, x (after MCTS): ", str(best_f), str(best_x) )
結果
上のコードを実行すると、MCTSによる最も良いアクションシークエンスが表示されます。
f, x (original) -- 初期状態
f, x (after MCTS) --- アクションシークエンスを実行したときの最期のxとそのときのf(x)
Terminal reached during a playout. #########
Terminal reached during a playout. #########
...
Terminal reached during a playout. #########
Best Action sequence: [3, -4, -4, 3, 3, 3, -4, -4, 3, 3, 3, -4, -2, -2, -4, -2,
-2, -4, 0, 3, 1, -3, -2, 1, -4, -4, -3, 3, -1, -2, 3, 1, 1, 4, 1, 4, 2, -2, 1,
-2, 3, -3, 1, 2, -2, -3, 1, 3, -4, -4, -1, -2, -4, 1, 3, -2, 4, 3, 3, 1, -3, -2,
1, -2, 1, 1, 4, -1, 1, 4, -4, -2, -4, 3, 3, 1, 2, -2, -4, -4, 4, -2, -3, 3, 4,
2, -1, -2, -1, -3, 4, 0, 3, -4, -3, -3, 3, -2, 3, 2, 2, -4, -2, -4, 1, -4, 4, -3
, 1, 3, -1, -2, 4, 3, -4, -1, 2, 4, 2, 1, 4, -4, 4, -3, 1, -1, 4, 0, -3, 2, 1, 4
, 1, -1, 3, 3, -3, -2, 3, 3]
Action sequence length: 140
Best Sum_reward: 141
f, x (original): 533.0 [-12.0, 14.0, -13.0, 9.0]
f, x (after MCTS): 0.0 [0.0, 2.0, 1.0, 2.0]
参考
- https://www.youtube.com/watch?v=Fbs4lnGLS8M
- https://jeffbradberry.com/posts/2015/09/intro-to-monte-carlo-tree-search/
- https://en.wikipedia.org/wiki/Monte_Carlo_tree_search
補足
上記コードは自由にコピー、修正、利用くださって結構です。本ポストが何かのお役に立ちましたら、引用いただければ幸いです。