格安2万円代の30倍光学ネットワークカメラをPCから制御出来るように。
本IPカメラの基本設定(ネットワーク設定等)や、付属アプリケーションの説明は、記載していません。

調査内容
対象とするネットワークカメラは、Ctronins(クロニクス)中華製の防犯カメラです。
- チルトパン制御
- ズームアウト・ズームイン制御
- 映像の取り込み
1. チルト・パン制御
チルト・パン制御は、http-getで制御ができます。
カメラを右側へ向ける
http://admin:admin@192.168.0.20/web/cgi-bin/hi3510//ptzctrl.cgi?-step=0&-act=right&-speed=63
この間に右側へ向く
http://admin:admin@192.168.0.20/web/cgi-bin/hi3510//ptzctrl.cgi?-step=0&-act=stop&-speed=63
カメラを左側へ向ける
http://admin:admin@192.168.0.20/web/cgi-bin/hi3510//ptzctrl.cgi?-step=0&-act=left&-speed=63
この間に左側へ向く
http://admin:admin@192.168.0.20/web/cgi-bin/hi3510//ptzctrl.cgi?-step=0&-act=stop&-speed=63
カメラを下側へ向ける
http://admin:admin@192.168.0.20/web/cgi-bin/hi3510//ptzctrl.cgi?-step=0&-act=down&-speed=63
この間に下側へ向く
http://admin:admin@192.168.0.20/web/cgi-bin/hi3510//ptzctrl.cgi?-step=0&-act=stop&-speed=63
カメラを上側へ向ける
http://admin:admin@192.168.0.20/web/cgi-bin/hi3510//ptzctrl.cgi?-step=0&-act=up&-speed=63
この間に上側へ向く
http://admin:admin@192.168.0.20/web/cgi-bin/hi3510//ptzctrl.cgi?-step=0&-act=stop&-speed=63
2. ズームアウト・ズームイン制御
ズームアウト・ズームイン制御は、http-getで制御ができます。
ズームイン
http://admin:admin@192.168.0.20/web/cgi-bin/hi3510//ptzctrl.cgi?-step=0&-act=zoomin&-speed=63
この間にズームインする
http://admin:admin@192.168.0.20/web/cgi-bin/hi3510//ptzctrl.cgi?-step=0&-act=stop&-speed=63
ズームアウト
http://admin:admin@192.168.0.20/web/cgi-bin/hi3510//ptzctrl.cgi?-step=0&-act=zoomout&-speed=63
この間にズームアウトする
http://admin:admin@192.168.0.20/web/cgi-bin/hi3510//ptzctrl.cgi?-step=0&-act=stop&-speed=63
3. 映像の取り込み
RTSP映像をPCに取り込めるようです。
first streame rtsp://ネットワークカメラのIP/11
second streame rtsp://ネットワークカメラのIP/12
注意:second streameの場合、openCVで文字を合成すると、表示文字列が、大ききなります。
pythonでRTSPをopenCVで取り込む
video_capture = VideoCaptureWrapper('rtsp://192.168.0.20/11')
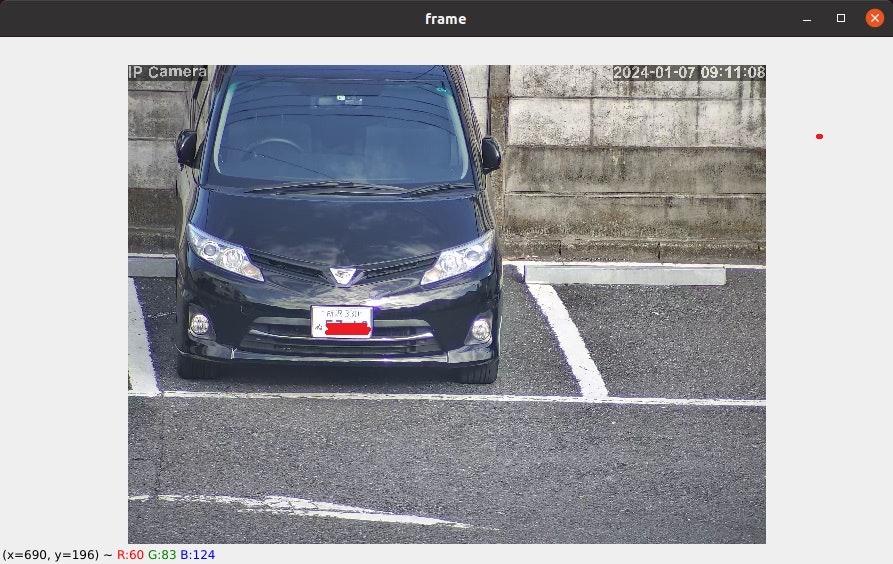
(1)50m先の車映像を静止画で出力
(2)50m先のアルコマーカを認識してみた

openCVでデジタル拡大:左側の写真が、認識されているアルコマーカNo=1,No=0

(3)飛行機撮影

4. ネットワークカメラ制御クラス python
(1)ネットワーク制御クラス
import requests
from enum import Enum
from time import sleep
"""
Ctronins(クロニクス中華) 防犯カメラ 500万画素 30倍光学ズーム:制御クラス
- ズームイン、ズームアウト制御
- チルトパン制御
"""
class IPcmd(Enum):
LEFT = 'left'
RIGHT = 'right'
UP = 'up'
DOWN = 'down'
IN = 'zoomin'
OUT = 'zoomout'
UPLEFT = 'upleft' # UPと同じ
UPRIGHT = 'upright' #
DOWNLEFT = 'downleft'
DOWNRIGHT = 'downright' # RIGTH と同じ
HOME = 'home' # ない
class IPcamera():
def __init__(self, host, user, password):
self.__url = "http://{}:{}@{}/web/cgi-bin/hi3510/".format(user, password, host)
self.__ptzctrl('stop')
def ptz(self, cmd, sec):
self.__ptzctrl(cmd.value)
sleep(sec)
self.__ptzctrl('stop')
def preset(self, num):
num = str(num - 1)
requests.get("{}/preset.cgi?-act=goto&-number={}".format(self.__url, num))
def __ptzctrl(self, cmdStr):
requests.get("{}/ptzctrl.cgi?-step=0&-act={}&-speed=63".format(self.__url, cmdStr))
def param(self, cmdStr):
_res = requests.get("{}/param.cgi?cmd={}".format(self.__url, cmdStr))
return _res
def main():
host = "192.168.0.20"
user = "admin"
password = "admin"
cam = IPcamera(host, user, password)
WAIT = 3
print("上へ移動 3sec")
cam.ptz(IPcmd.UP, 3)
sleep(WAIT)
print("ズームイン 3sec")
cam.ptz(IPcmd.IN, 3)
sleep(WAIT)
print("右へ移動 5sec")
cam.ptz(IPcmd.RIGHT, 5)
sleep(WAIT)
print("左へ移動 5sec")
cam.ptz(IPcmd.LEFT, 5)
sleep(WAIT)
print("下へ移動 3sec")
cam.ptz(IPcmd.DOWN, 3)
sleep(WAIT)
print("ズームアウト3sec")
cam.ptz(IPcmd.OUT, 3)
sleep(WAIT)
if __name__ == "__main__":
main()
(2)実験
情報取得系のAPIのテストですが、あくまでも参考です。
print("getmotorattr..")
res = cam.param('getmotorattr')
print(res.text)
sleep(10)
print("getmotorrange..")
res = cam.param('getmotorrange')
print(res.text)
print("getinfrared..")
res = cam.param('getinfrared')
print(res.text)
print("getlanguage..")
res = cam.param('getlanguage')
print(res.text)
結果
getmotorattr..
var pandir="0";
var tiltdir="0";
var panspeed="0";
var tiltspeed="0";
var panscan="1";
var tiltscan="1";
var movehome="off";
var movesteptimeout="1000";
var presettimeout="30";
var ptzalarmmask="on";
var alarmpresetindex="1";
var poweronpresetindex="0";
var watchpresetindex="0";
var poweronscanenable="0";
var limitleft="-1";
var limitright="-1";
var tourinterval="5;10;15;20;30;60;90;120";
getmotorrange..
var panrange="1006";
var tiltrange="144";
var panhome="503";
var tilthome="55";
var pangap="24";
var tiltgap="32";
var peripheral="0";
var selfcheckspeed="45";
var lenstype="3";
var trackpreset="31";
var trackhtimems="700";
var trackvtimems="300";
getinfrared..
var infraredstat="auto";
getlanguage..
var lancode="1";