1 以下の式をラプラス変換して,$F(s) = \mathcal{L}[f(t)]$ を求めましょう.
\begin{eqnarray}
(1)f(t) &=& e^{2t} \\
F(s) &=& \mathcal{L}[f(t)] \\
&=& \int_{0}^{\infty} f(t)e^{-st}dt \\
&=& \int_{0}^{\infty} e^{2t}e^{-st}dt \\
&=& \int_{0}^{\infty} e^{-(s-2)t}dt \\
&=& \left[ -\frac{1}{s-2} e^{-(s-2)t} \right]_{0}^{\infty} \\
&=& \frac{1}{s-2}\\
\end{eqnarray}
\begin{eqnarray}
(2)f(t) &=& 3t + 8\\
F(s) &=& \mathcal{L}[f(t)] \\
&=& \int_{0}^{\infty} (3t+8)e^{-st}dt \\
&=& \int_{0}^{\infty} 3t e^{-st}dt + \int_{0}^{\infty} 8 e^{-st}dt \\
&=& \left[ -\frac{3}{s} t e^{-st} \right]_{0}^{\infty}
- \int_{0}^{\infty} \left(-\frac{3}{s} e^{-st} \right) dt
- \left[ \frac{8}{s} e^{-st} \right]_{0}^{\infty} \\
&=& 0 + \frac{3}{s} \int_{0}^{\infty} e^{-st}dt + \frac{8}{s} \\
&=& \frac{3}{s} \cdot \frac{1}{s} + \frac{8}{s} \\
&=& \frac{3}{s^2} + \frac{8}{s}
\end{eqnarray}
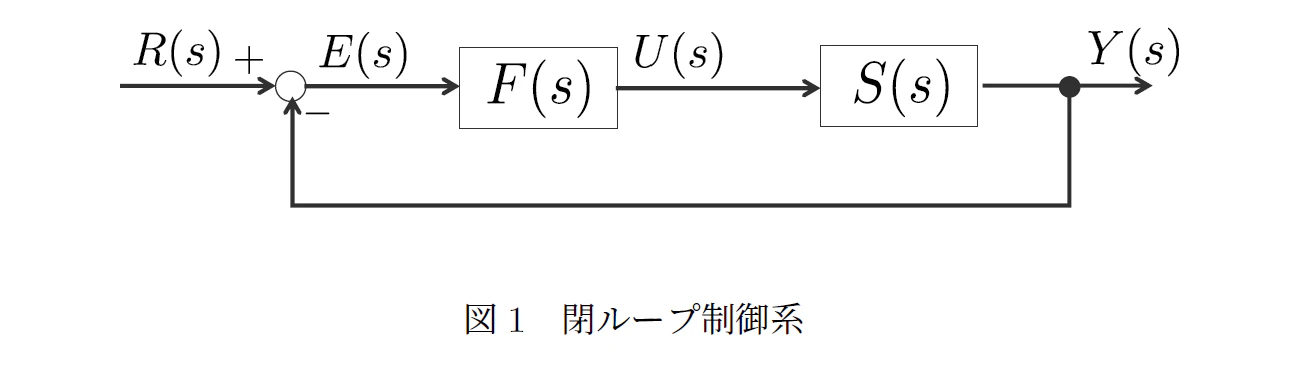
2 図1のブロック線図の $R(s)$ から $Y(s)$($r$ から $y$)への入出力関係を求めましょう.
\begin{eqnarray}
Y(s) &=& P(s)U(s) \\
U(s) &=& K(s)E(s) \\
E(s) &=& R(s) - Y(s)\\
Y(s) &=& P(s)K(s)E(s) \\
&=& P(s)K(s)\bigl(R(s) - Y(s)\bigr) \\
&=& P(s)K(s)R(s) - P(s)K(s)Y(s)\\
(1 + P(s)K(s))Y(s) &=& P(s)K(s)R(s)\\
\frac{Y(s)}{R(s)} &=& \frac{P(s)K(s)}{1 + P(s)K(s)}\\
\end{eqnarray}
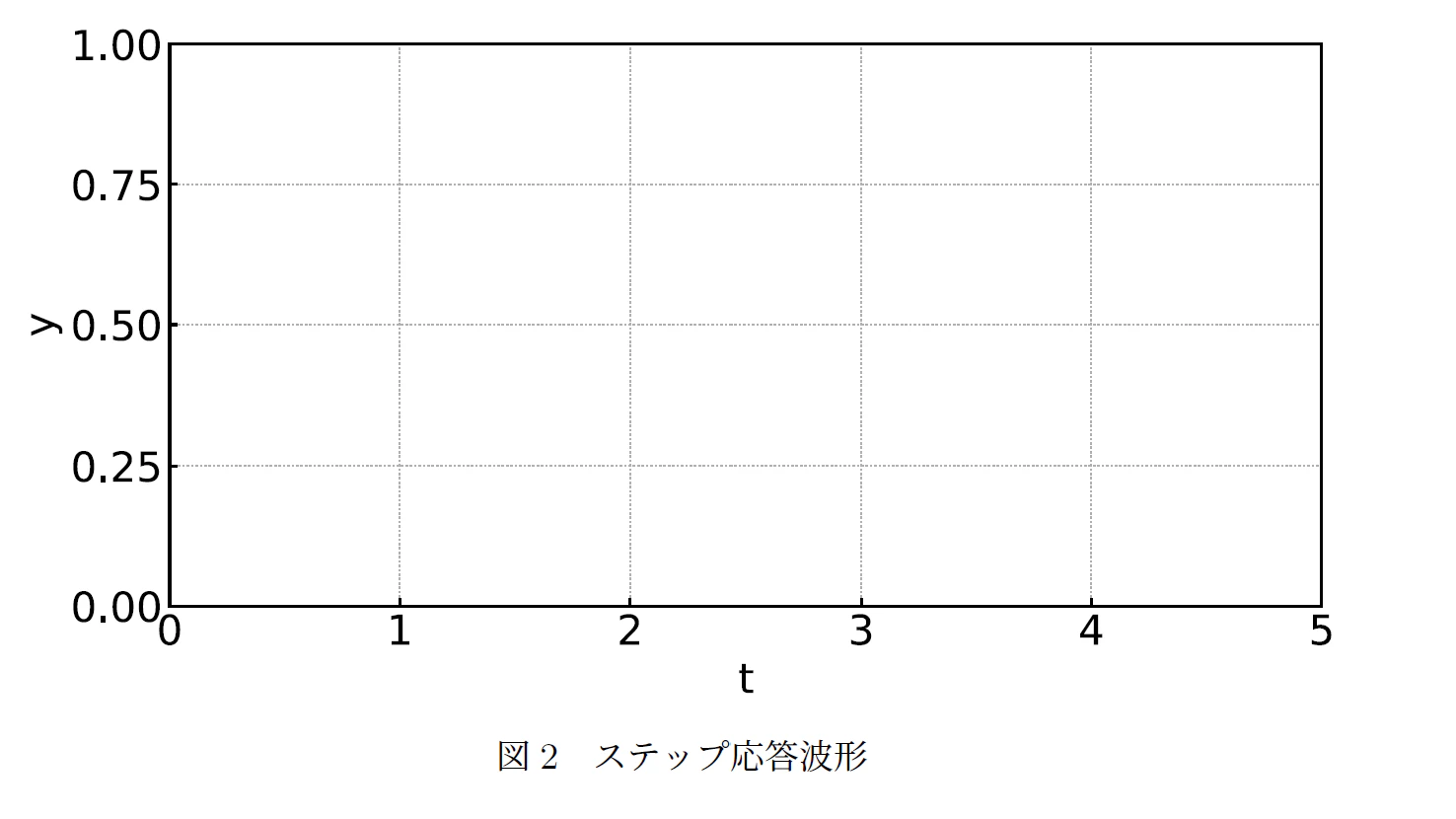
3 制御対象 $P(s) = \dfrac{1}{s+1}$ と制御器 $K(s) = 3$ について図1の制御系を構築し,参照信号をステップ信号で与えたときの,制御出力 $y(t)$ を計算し,$y(t)$ の波形を図2に記入してください.
\begin{eqnarray}
\frac{Y(s)}{R(s)} &=& \frac{P(s)K(s)}{1 + P(s)K(s)} \\
R(s) = \frac{1}{s}, \quad K(s) &=& 3, \quad P(s) = \frac{1}{s+1}\text{これを代入すると,}\\
Y(s) &=& \frac{\frac{3}{s+1}}{1 + \frac{3}{s+1}} \cdot \frac{1}{s}\\
Y(s) &=& \frac{3}{s+1+3} \cdot \frac{1}{s} \\
&=& \frac{3}{s(s+4)}\\
\text{部分分数分解すると,}\\
Y(s) &=& \frac{3}{4}\left( \frac{1}{s} - \frac{1}{s+4} \right)\\
\text{これを逆ラプラス変換すると,}\\
y(t) &=& \frac{3}{4}\left(1 - e^{-4t}\right)\\
\text{定常値} && \frac{3}{4} \\
\text{時定数} && 0.25
\end{eqnarray}

4 以下の制御対象の安定性を判別しましょう.また,その理由もあわせて答えてください.
(1)
\begin{eqnarray}
G_1(s) &=& \frac{8}{s+3} \\
\text{分母} &=& s + 3 = 0 \\
s &=& -3 \\
&&\text{極の実部が全て負なので安定}
\end{eqnarray}
(2)
\begin{eqnarray}
G_2(s) &=& \frac{2}{s^2 + 4s + 8}\\
\text{分母} &=& s^2 + 4s + 8 = 0 \\
s &=& \frac{-4 \pm \sqrt{16 - 4 \cdot 1 \cdot 8}}{2} \\
&=& \frac{-4 \pm \sqrt{-16}}{2} \\
&=& \frac{-4 \pm 4i}{2} \\
&=& -2 \pm 2i\\
&&\text{極の実部が全て負なので安定}
\end{eqnarray}