ATtiny1616でエンコーダーモーターを動かす2の続きです。
https://qiita.com/usashirou/items/4dc1c7c28c142e90bd5b
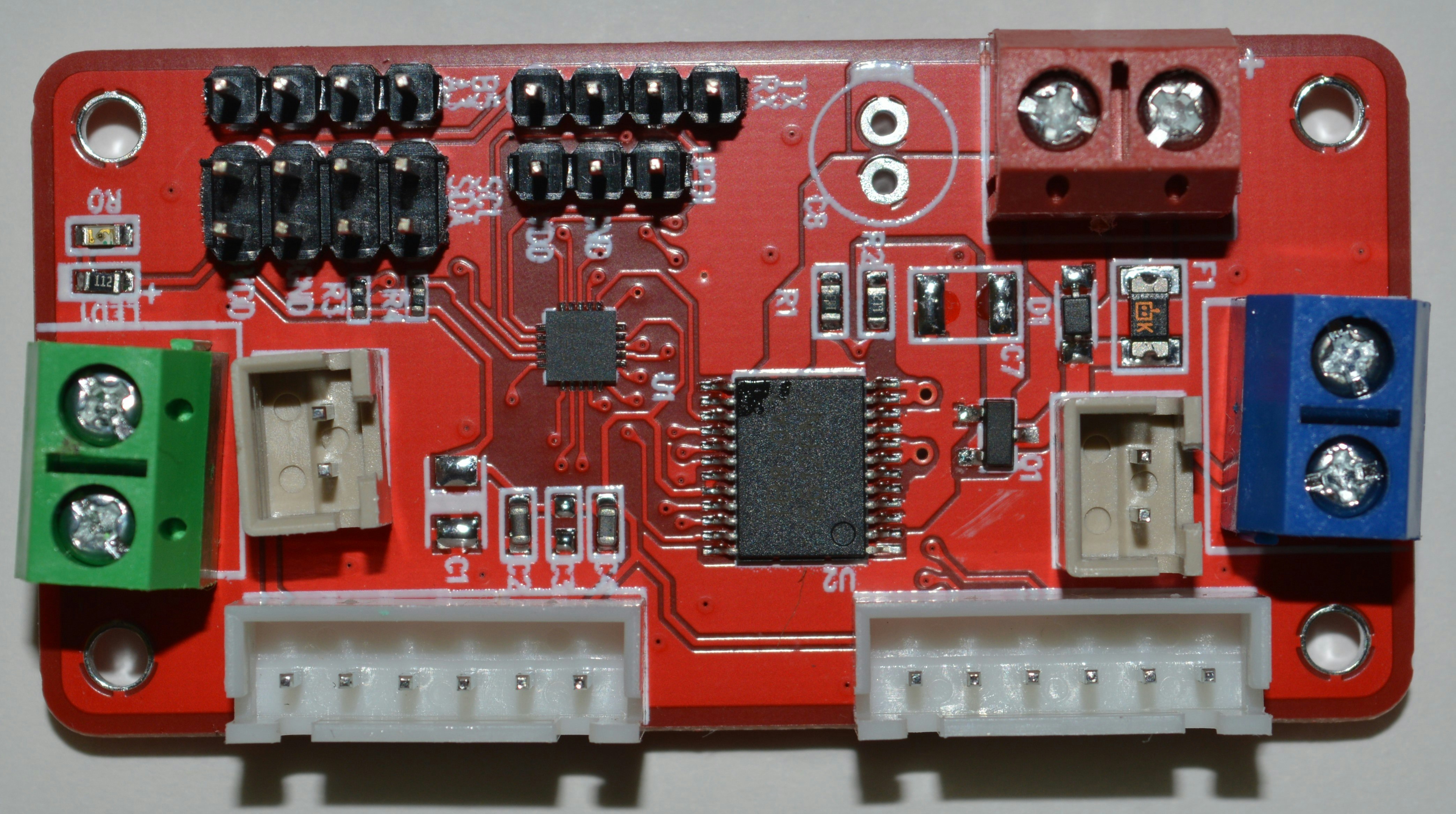
今回は、ATtiny1616を使用したオリジナルボードを製作し、これを動かしていきます。
ボード全容
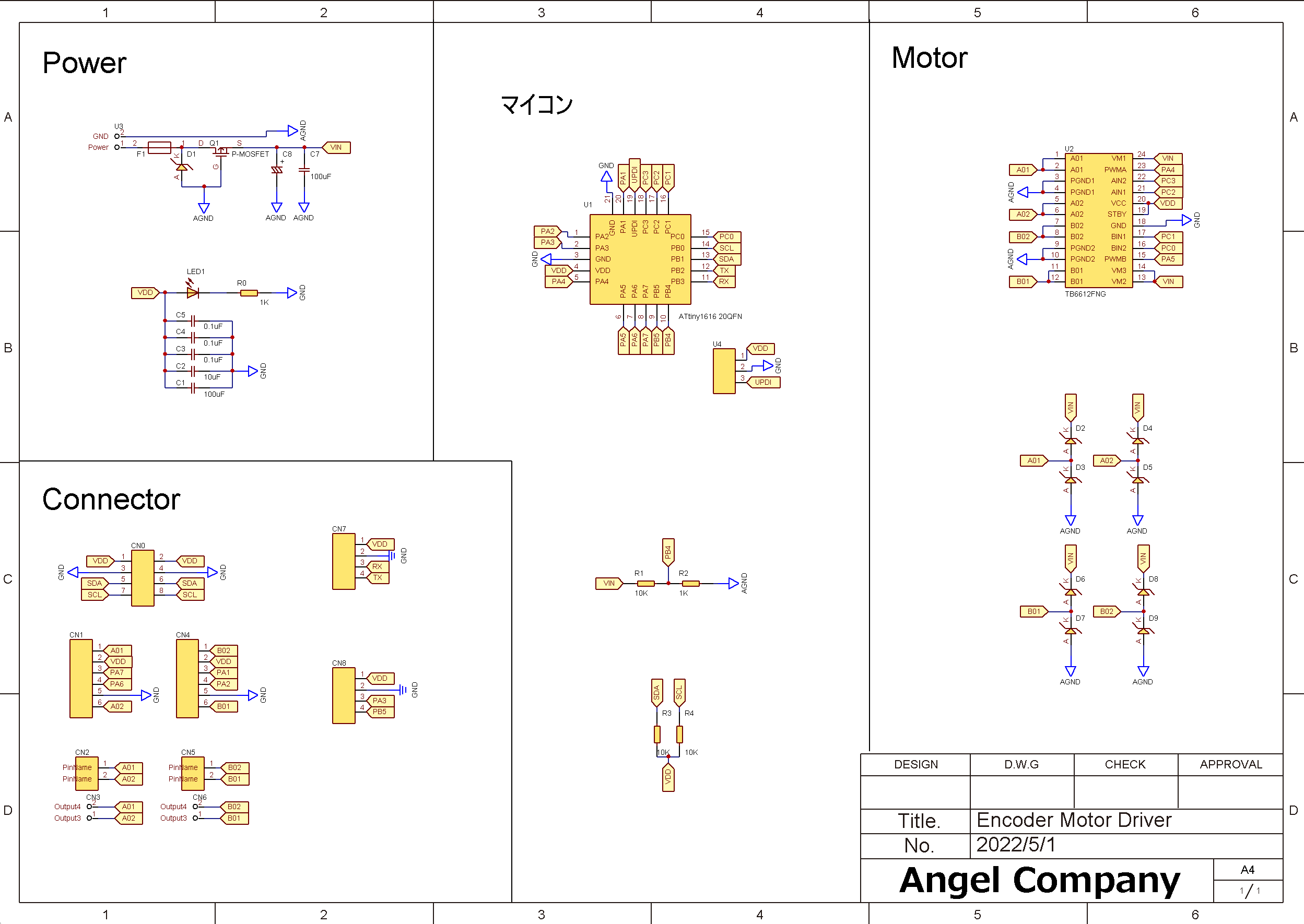
回路図
プログラム
前回同様ArduinoTutorialsのプログラムを修正して製作しています。
https://github.com/curiores/ArduinoTutorials/blob/master/encoderControl/part3/part3.ino
重要なのはattachInterruptを入れる必要がある事です。
attachInterrupt(digitalPinToInterrupt(ENCA), readEncoderA, RISING);
attachInterrupt(digitalPinToInterrupt(ENCC), readEncoderB, RISING);
# define ENCA 2 // EncoderA
# define ENCB 3 // EncoderA
# define ENCC 14 // EncoderB
# define ENCD 15 // EncoderB
# define AIN1 12 // MotorA
# define AIN2 13 // MotorA
# define BIN1 10 // MotorB
# define BIN2 11 // MotorB
# define PWMA 0 // MotorA
# define PWMB 1 // MotorB
# define ADC 5 // ADC
int posA = 0;
int posB = 0;
int sensorValue = 0; // value read from the pot
void setup() {
Serial.begin(9600);
pinMode(ENCA, INPUT);
pinMode(ENCB, INPUT);
pinMode(ENCC, INPUT);
pinMode(ENCD, INPUT);
attachInterrupt(digitalPinToInterrupt(ENCA), readEncoderA, RISING);
attachInterrupt(digitalPinToInterrupt(ENCC), readEncoderB, RISING);
}
void loop() {
setMotor(1, 150, AIN1, AIN2);
delay(2000);
Serial.print("EncoderA = ");
Serial.println(posA);
Serial.print("\r\n");
Serial.print("EncoderB = ");
Serial.println(posB);
Serial.print("\r\n");
sensorValue = analogRead(ADC);
Serial.print("sensor = ");
Serial.print(sensorValue);
Serial.print("\r\n");
setMotor(1, 250, AIN1, AIN2);
delay(2000);
Serial.print("EncoderA = ");
Serial.println(posA);
Serial.print("\r\n");
Serial.print("EncoderB = ");
Serial.println(posB);
Serial.print("\r\n");
sensorValue = analogRead(ADC);
Serial.print("sensor = ");
Serial.print(sensorValue);
Serial.print("\r\n");
setMotor(1, 350, AIN1, AIN2);
delay(2000);
Serial.print("EncoderA = ");
Serial.println(posA);
Serial.print("\r\n");
Serial.print("EncoderB = ");
Serial.println(posB);
Serial.print("\r\n");
sensorValue = analogRead(ADC);
Serial.print("sensor = ");
Serial.print(sensorValue);
Serial.print("\r\n");
setMotor(0, 0, AIN1, AIN2);
Serial.print("EncoderA = ");
Serial.println(posA);
Serial.print("\r\n");
Serial.print("EncoderB = ");
Serial.println(posB);
Serial.print("\r\n");
sensorValue = analogRead(ADC);
Serial.print("sensor = ");
Serial.print(sensorValue);
Serial.print("\r\n");
delay(500);
setMotor(-1, 350, AIN1, AIN2);
delay(2000);
Serial.print("EncoderA = ");
Serial.println(posA);
Serial.print("\r\n");
Serial.print("EncoderB = ");
Serial.println(posB);
Serial.print("\r\n");
sensorValue = analogRead(ADC);
Serial.print("sensor = ");
Serial.print(sensorValue);
Serial.print("\r\n");
setMotor(0, 0, AIN1, AIN2);
Serial.print("EncoderA = ");
Serial.println(posA);
Serial.print("\r\n");
Serial.print("EncoderB = ");
Serial.println(posB);
Serial.print("\r\n");
sensorValue = analogRead(ADC);
Serial.print("sensor = ");
Serial.print(sensorValue);
Serial.print("\r\n");
delay(1500);
Serial.print("EncoderA = ");
Serial.println(posA);
Serial.print("\r\n");
Serial.print("EncoderB = ");
Serial.println(posB);
Serial.print("\r\n");
sensorValue = analogRead(ADC);
Serial.print("sensor = ");
Serial.print(sensorValue);
Serial.print("\r\n");
}
void setMotor(int dir, int pwmVal, int in1, int in2) {
if (dir == 1) {
analogWrite(PWMA, pwmVal);
digitalWrite(AIN1, HIGH);
digitalWrite(AIN2, LOW);
analogWrite(PWMB, pwmVal);
digitalWrite(BIN1, HIGH);
digitalWrite(BIN2, LOW);
}
else if (dir == -1) {
analogWrite(PWMA, pwmVal);
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, HIGH);
analogWrite(PWMB, pwmVal);
digitalWrite(BIN1, LOW);
digitalWrite(BIN2, HIGH);
}
else {
analogWrite(PWMA, pwmVal);
digitalWrite(AIN1, LOW);
digitalWrite(AIN2, LOW);
analogWrite(PWMB, pwmVal);
digitalWrite(BIN1, LOW);
digitalWrite(BIN2, LOW);
}
}
void readEncoderA() {
int a = digitalRead(ENCB);
if (a > 0) {
posA++;
}
else {
posA--;
}
}
void readEncoderB() {
int b = digitalRead(ENCC);
if (b > 0) {
posB++;
}
else {
posB--;
}
}
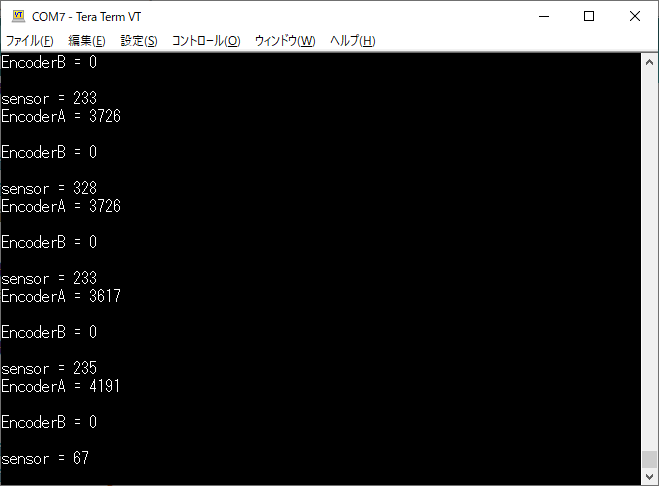
出力
シリアル出力を見てみましょう