X-Cube-MCSDKはモータ制御の設計を迅速化・簡略化するSTM32 PMSM FOCソフトウェア開発キット(SDK)
(STM32 Motor Control Software Development Kit (MCSDK))らしい
今回は、P-NUCLEO-IHM002をSTM32CubeIDEで実行するまでを行います。
ソフトウェアインストール
まずは、ソフトをインストールしましょう。
X-CUBE-MCSDKをインストール
https://www.st.com/en/embedded-software/x-cube-mcsdk.html
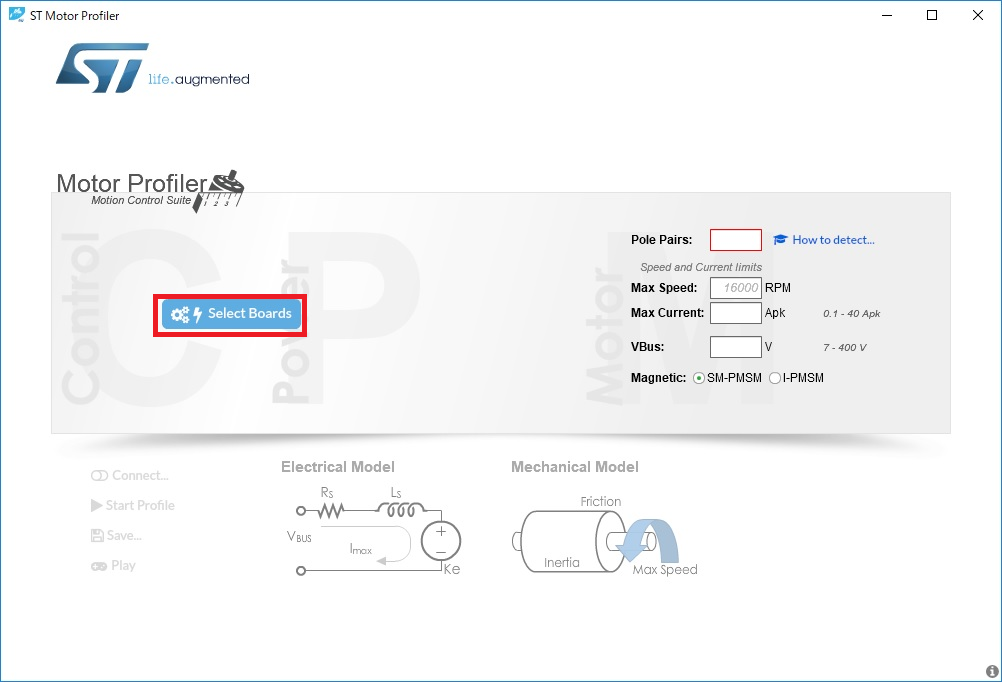
Motor Profilerを立ち上げましょう。
NetFramework3.5がないと怒られることがあるので、インストールします。
Motor Profilerが立ち上がりました。
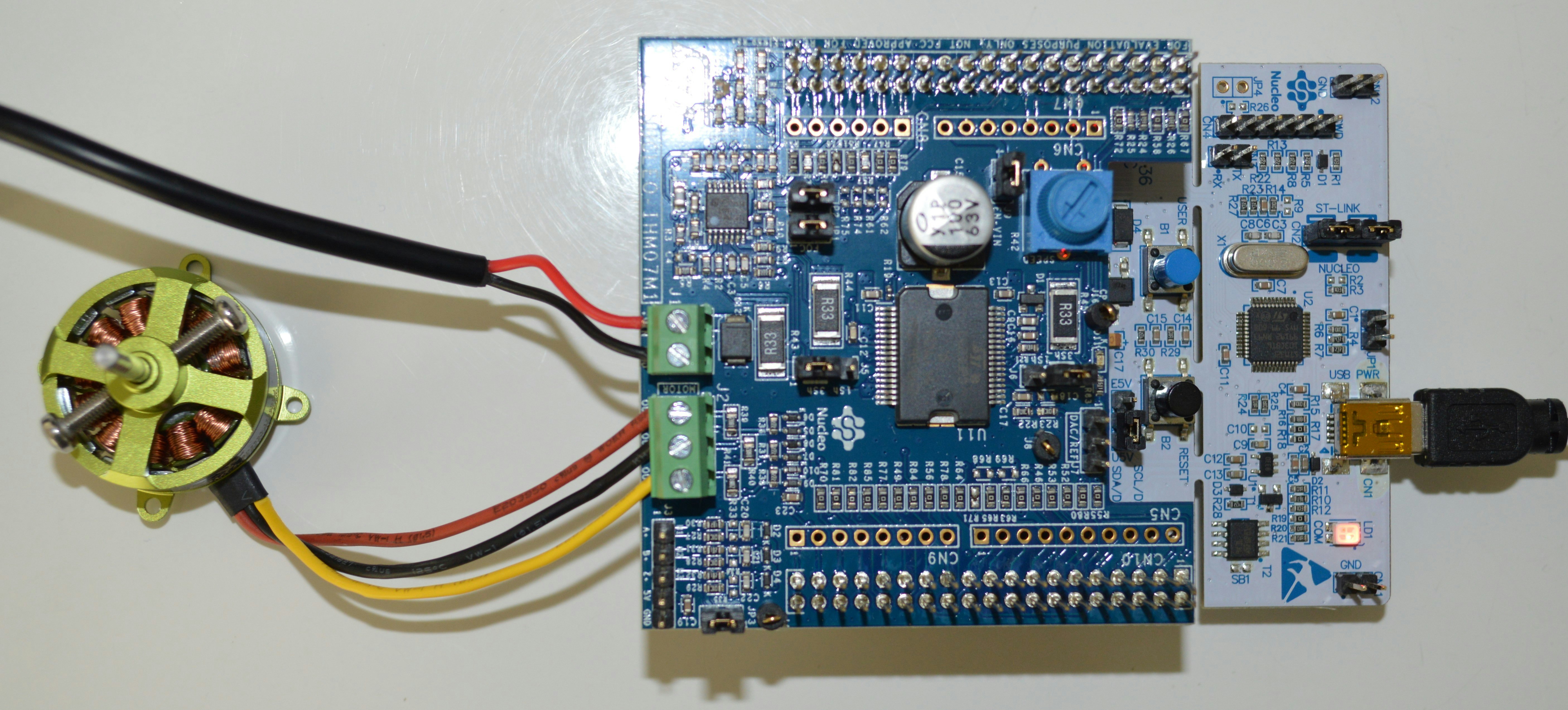
#モーターと電源の接続
ACアダプターのジャックは、コンセントにあうものを使用します。
二本の線は、赤が+ 黒がGNDにつなげます。
モーターからの線は、ど子に取り付けても構いません。
ただし、モーターは、固定されていないので、動いても危険じゃない場所においてください。
モータープロファイルの作成
それでは、モーターの特性を測ってみましょう
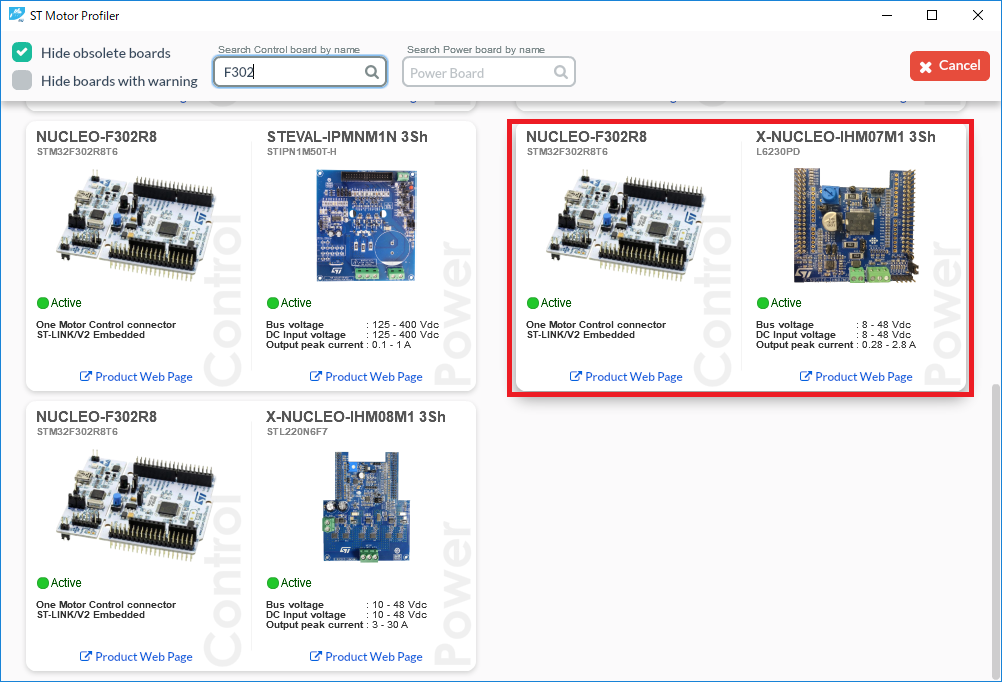
SelectBoardをクリックします。
NUCLEO-F302R8とX-NUCLEO-IHM07M1の組み合わせを選択します。
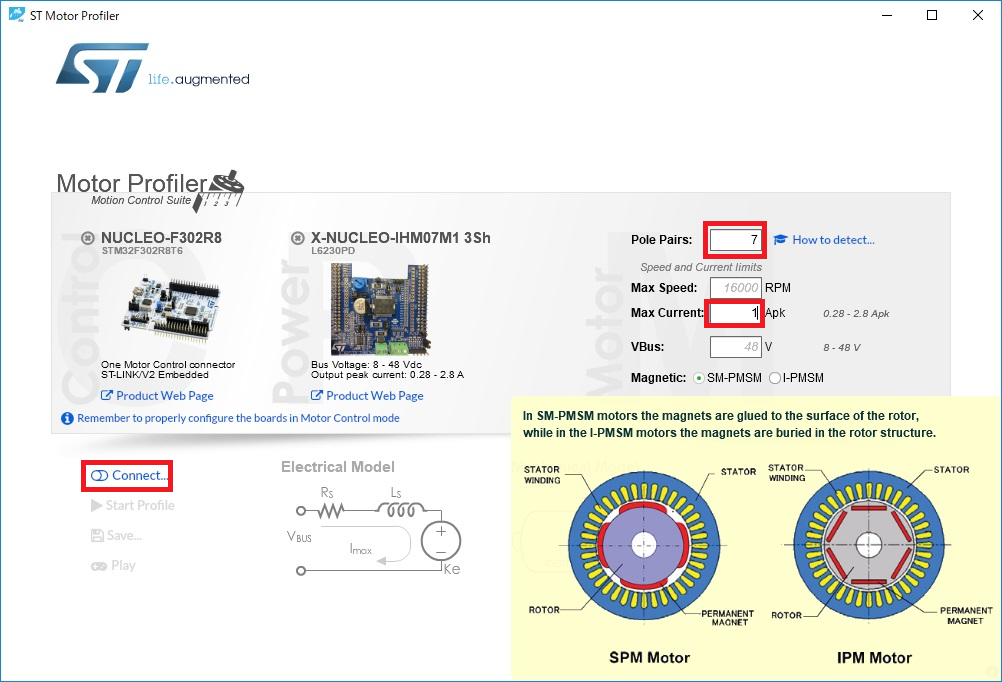
Pole PairsとMaxCurrentは設定しましょう。
PolePairsは、極対数です。
今回は、
Pole Pairs:7(14極なので7対です)
MaxCurrent:1APK
を入力し、Connectを押します。
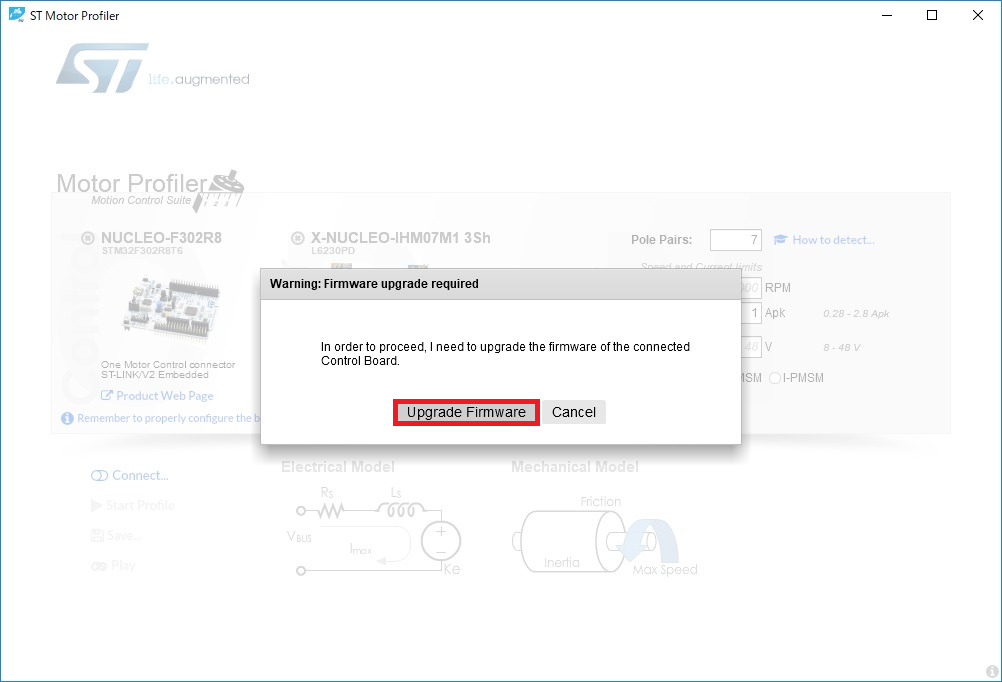
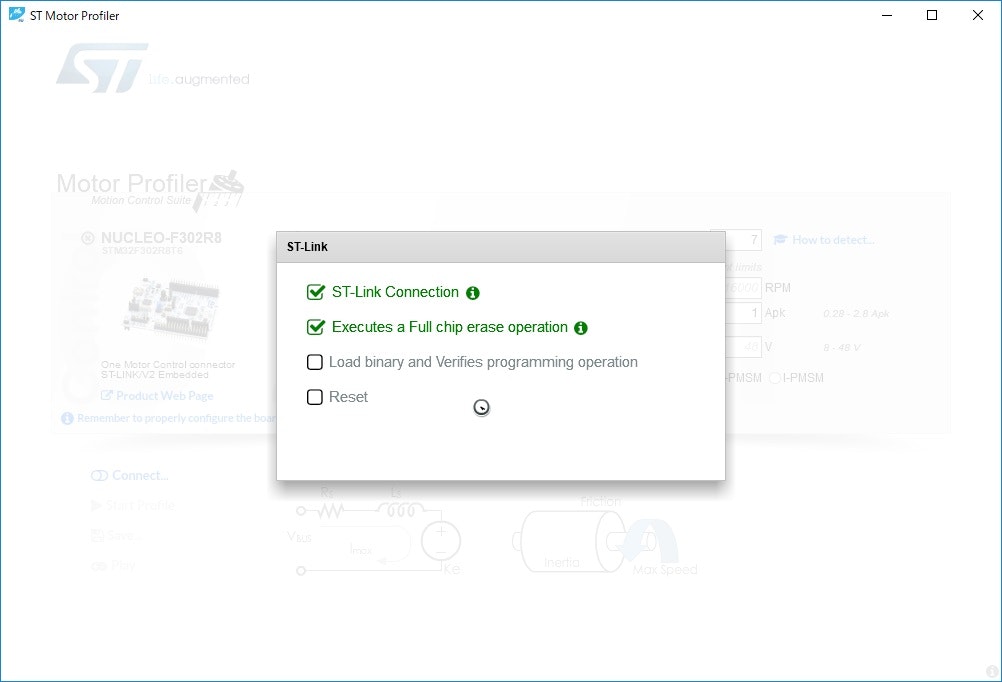
ファームウェアのアップデートの警告が出ます。
数回やったので理解しましたが、モータープロファイル用のファームウェアを書き込んで良いですか?
という事でした。
ファームウェアアップデートと言われていましたが、そうではなく、検出用ファームの書き込みになります。
よって、ファーム消去からスタートします。
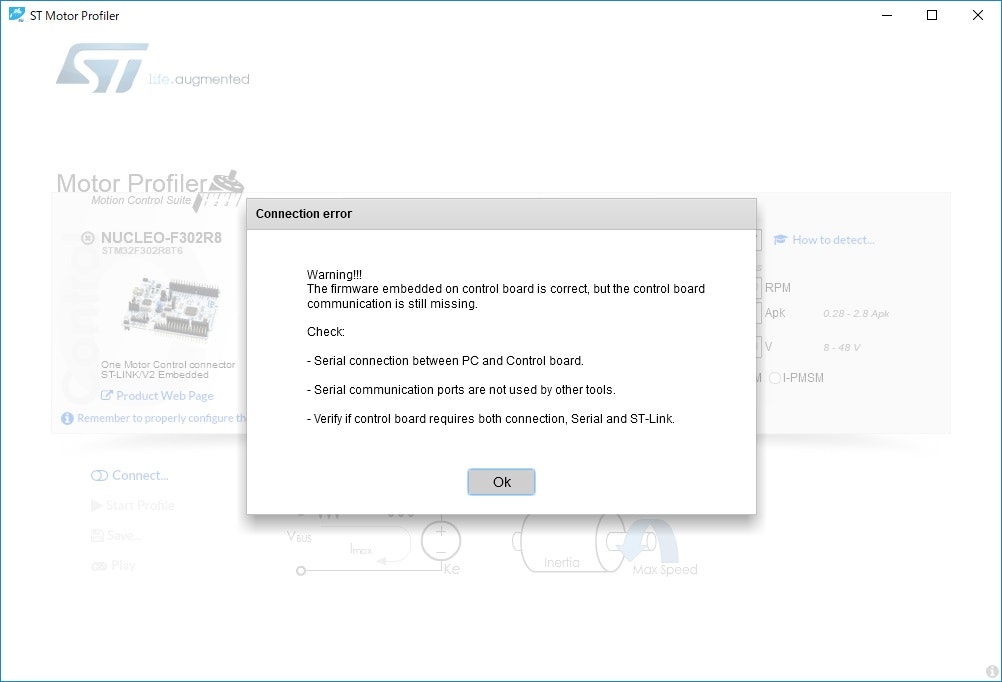
ワーニングが出ることもあります。
この時、必ず、きちんと電源つながっているか?
線はつながっているか確認しましょう。
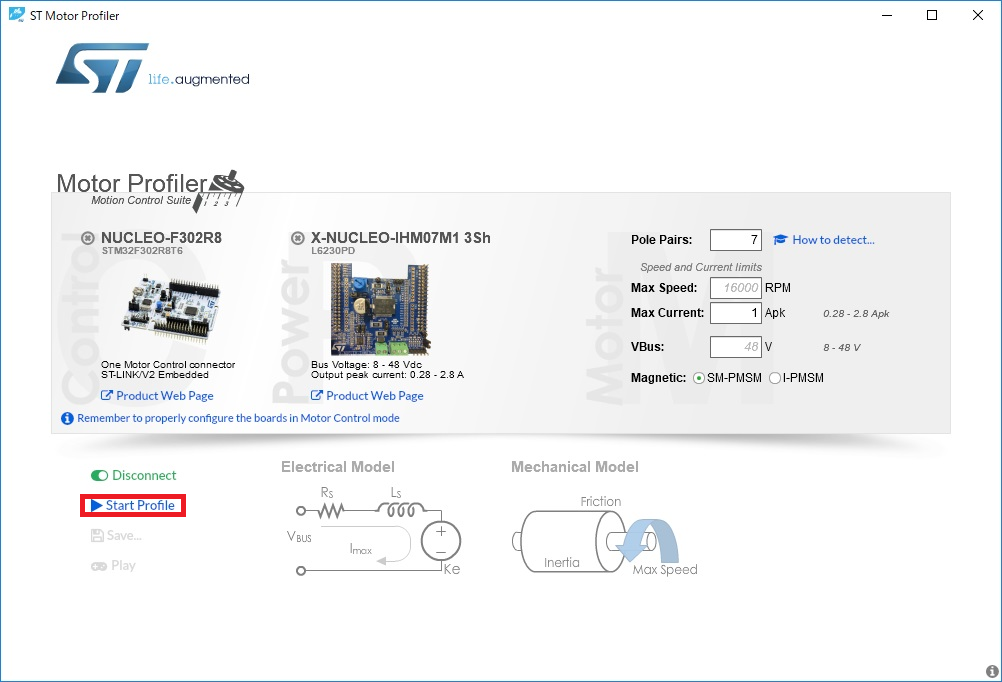
StarProfileをクリックします。
少し待つと、シュルシュルとモーターが動き始め
最大回転をし、再度止まります。
最初の待ち時間の間に検出用のファイルを転送しているそうです。
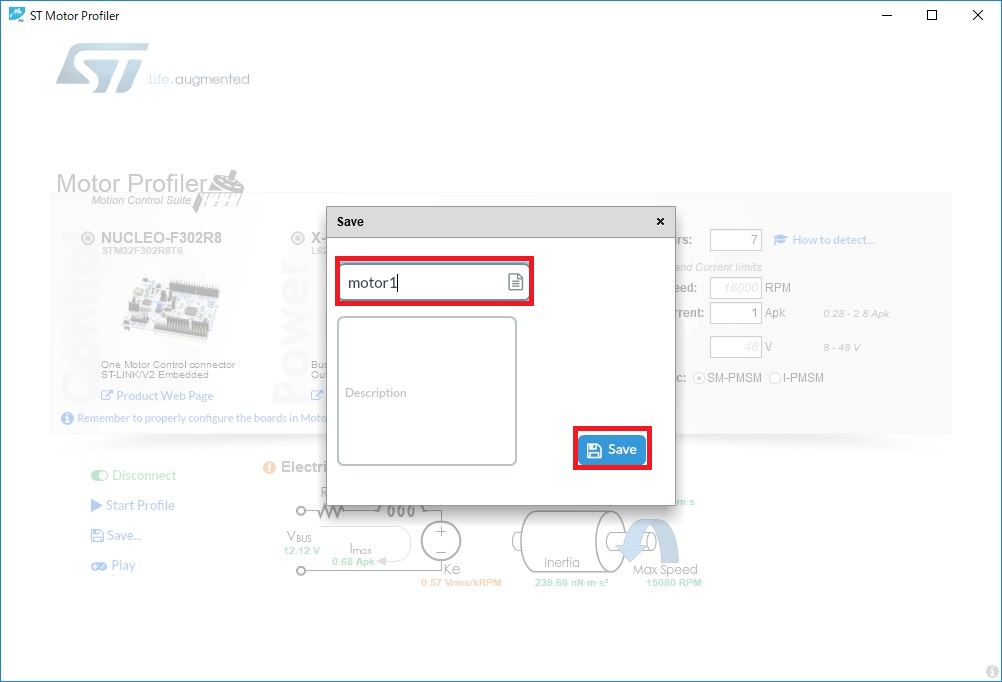
モータープロファイルが出来上がったので、Saveをクリックします。
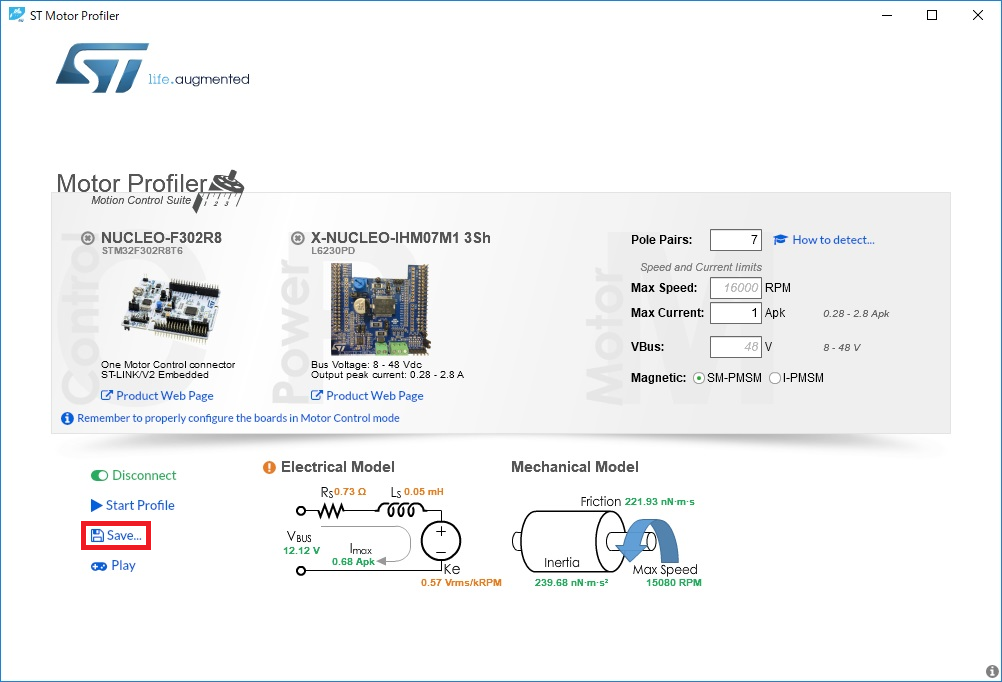
今回は、Motor1としました。
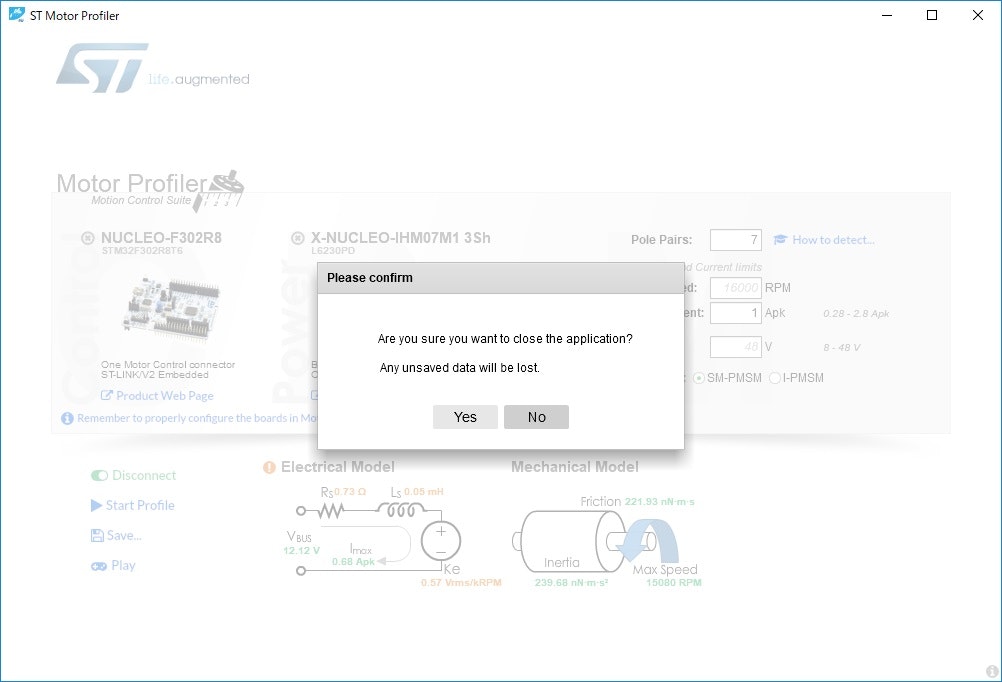
保存したら、アプリケーションを閉じます。
この時、DisconnectしてConeectとなっていることを確認します。

閉じるときにアラートがでます。
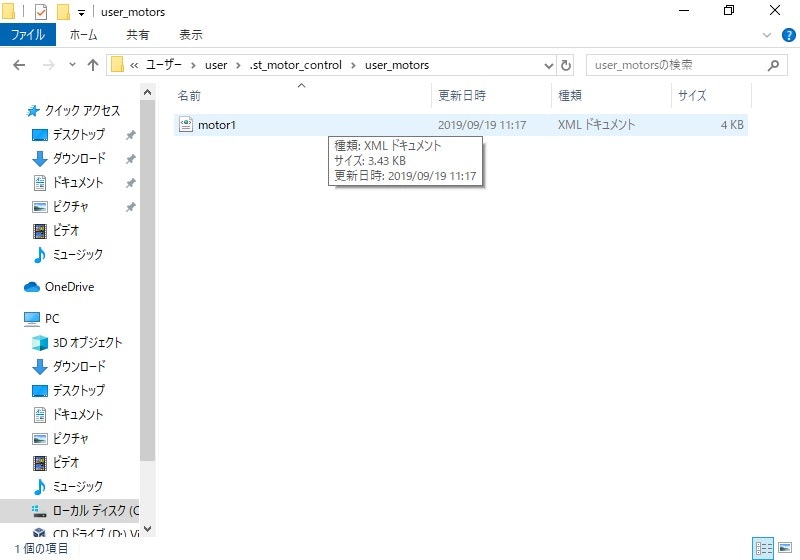
今回作ったモーターのプロファイルは、
C:\ユーザー名\ユーザー名.st_motor_control\user_motors
に保存されています。
STM32CubeMXインストール
STM32CubeMXをインストールします。
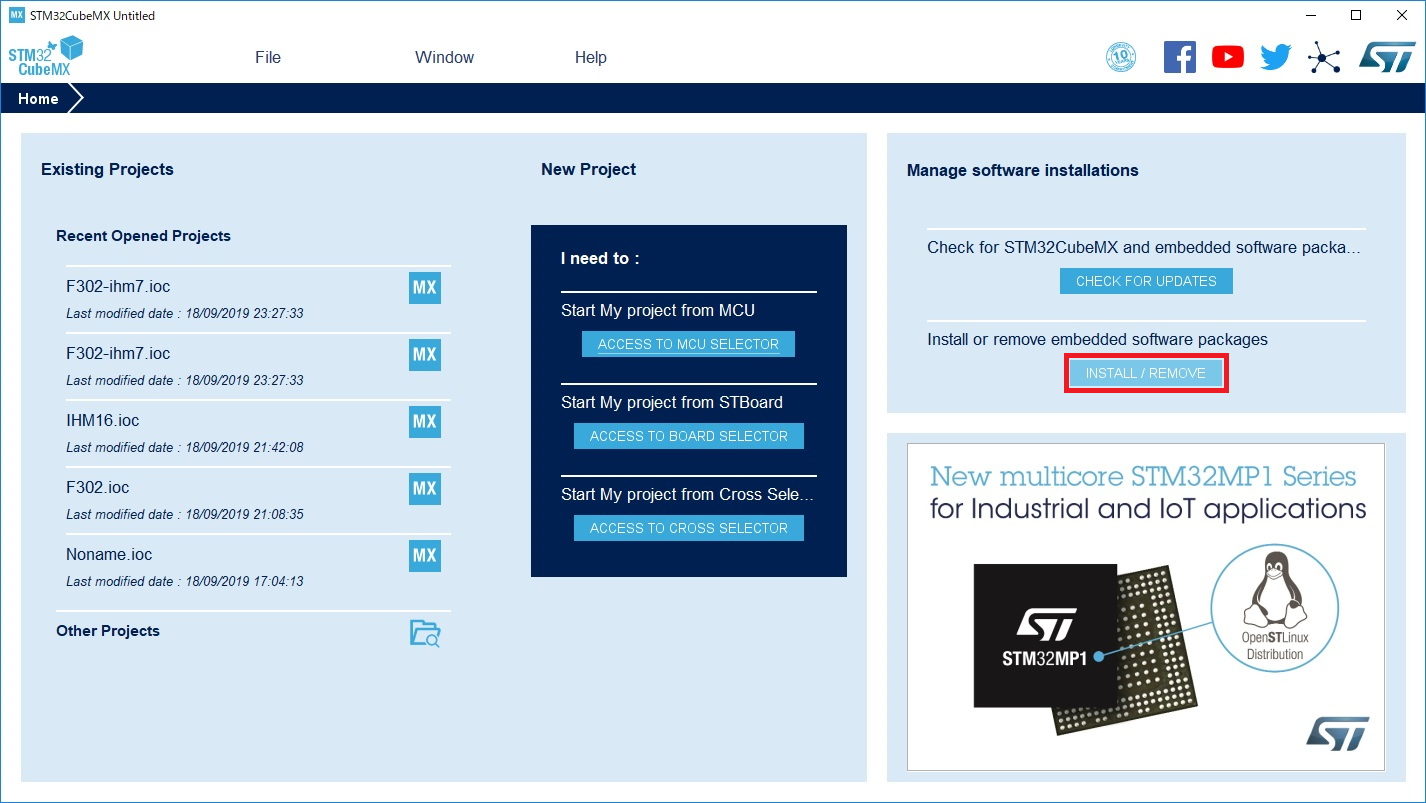
STM32CubeMXを起動します。
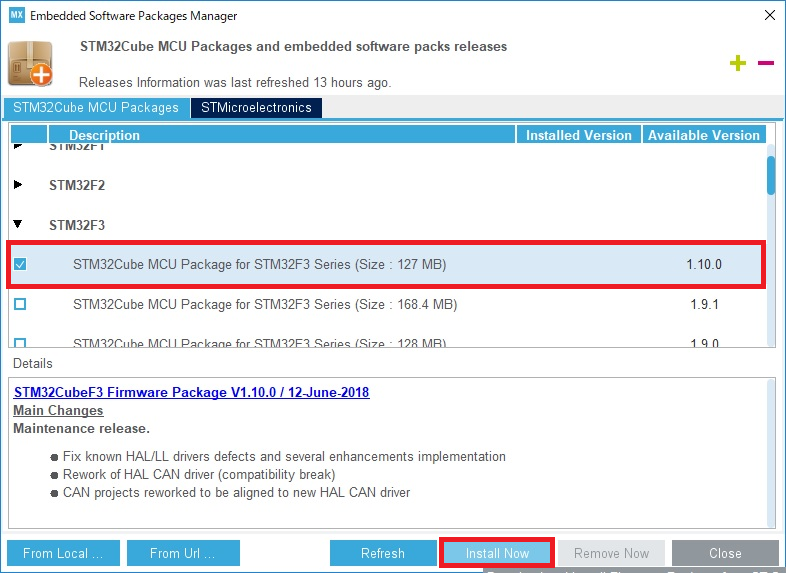
右のInstall/Removeをクリックします。
STM32F3を選択し、InstallNowをクリックします
**今回はSTM32F302ですが、違うチップで作るときは、そのチップを選択します。
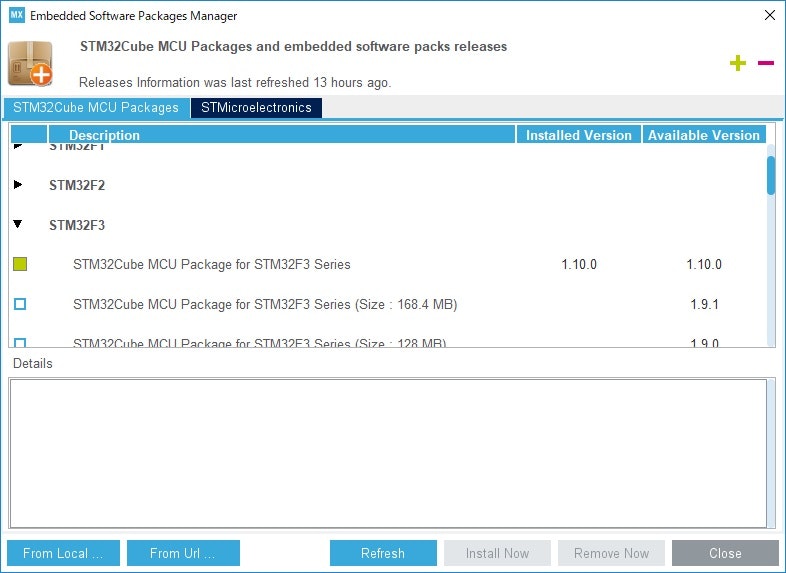
緑のアイコンになればインストール完了です。
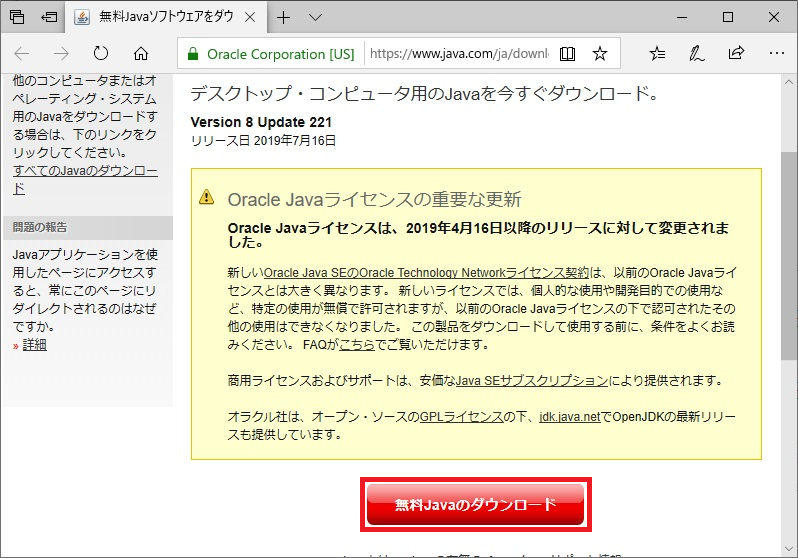
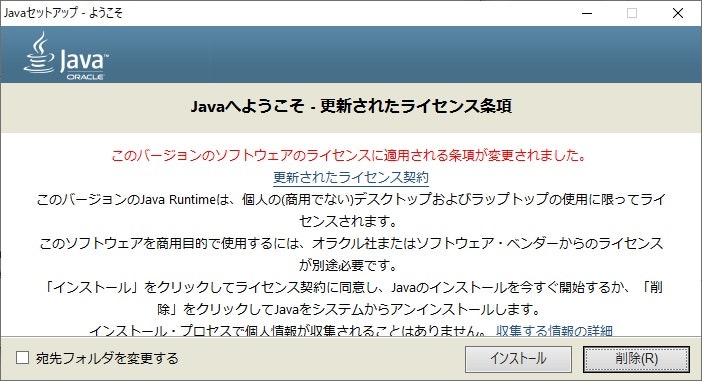
Javaのインストールが出る時はインストールしましょう
以上で、モータープロファイル及びアプリケーションの準備が完了しました。
STM32 モーター制御 X-Cube-MCSDKを使おう STM32CubeIDE編に続きます
https://qiita.com/usashirou/items/f31b88c1b7d2542bb901