はじめに
この記事は SLP_KBITその2 Advent Calendar 2016 の16日目の記事です。
今回はEV3とleJOSを使用してIoTっぽいことをします。
使用している環境については前回の記事を参考にしてください。
IoTについて
様々なモノがインターネットに接続され、情報交換することによって相互に制御する仕組みのことです。私が面白いと思った事例として、スマホで鍵の開閉ができるスマートロックや、バッテリー残量や位置情報から観光をサポートする電動バイクのレンタル事業があります。
今回作ったもの
今回は潜水艦のソナーのようなものを作ります。
超音波センサーのついている車型のロボットを一回転させ、周辺の物体の距離を測定します。
その後、取得したデータをサーバーに送り、グラフに変換してブラウザで表示します。
動作確認
ロボットの動作
ロボットが一回転しています。
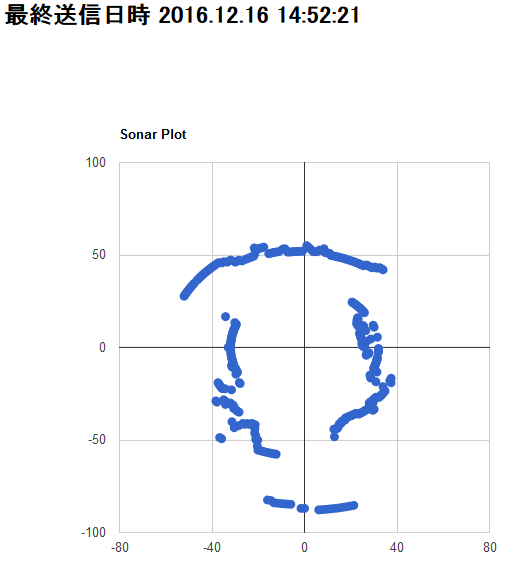
ブラウザで確認
Webページの画面です。取得したデータをグラフにします。
開発
ロボット側
やることは至ってシンプルです。
まず、ロボットをゆっくりと360度回転させます。そのときに、1度ごとに超音波センサで値を取得します。
値を取得した後は、その値をサーバーにPOSTで送信します。
ロボット側のコードはここにあります。
サーバー側
サーバー側は、ロボットからPOSTされたときの値の記録と、ブラウザでの結果の確認を実装します。
ロボットからポストされたデータは、一旦CSVとして記録されます。
その後、ブラウザからアクセスがあったときに、Google Visualization APIを使用してCSVのデータをグラグにして表示します。
サーバー側のコードはここにあります。
おわりに
今回はロボット側からサーバーにデータを送るだけのシンプルなシステムを作りました。
ネットワークに繋げるモノさえあれば、IoTは簡単に始められます。
ぜひ普段の活動やハッカソンで作成してください。