概要
本編
今回の記事は前回の記事の続編になっています。
今回はAWSIMをつかった新しいセンサを作ってみようと思います。
元にするのはVLP16のセンサです。
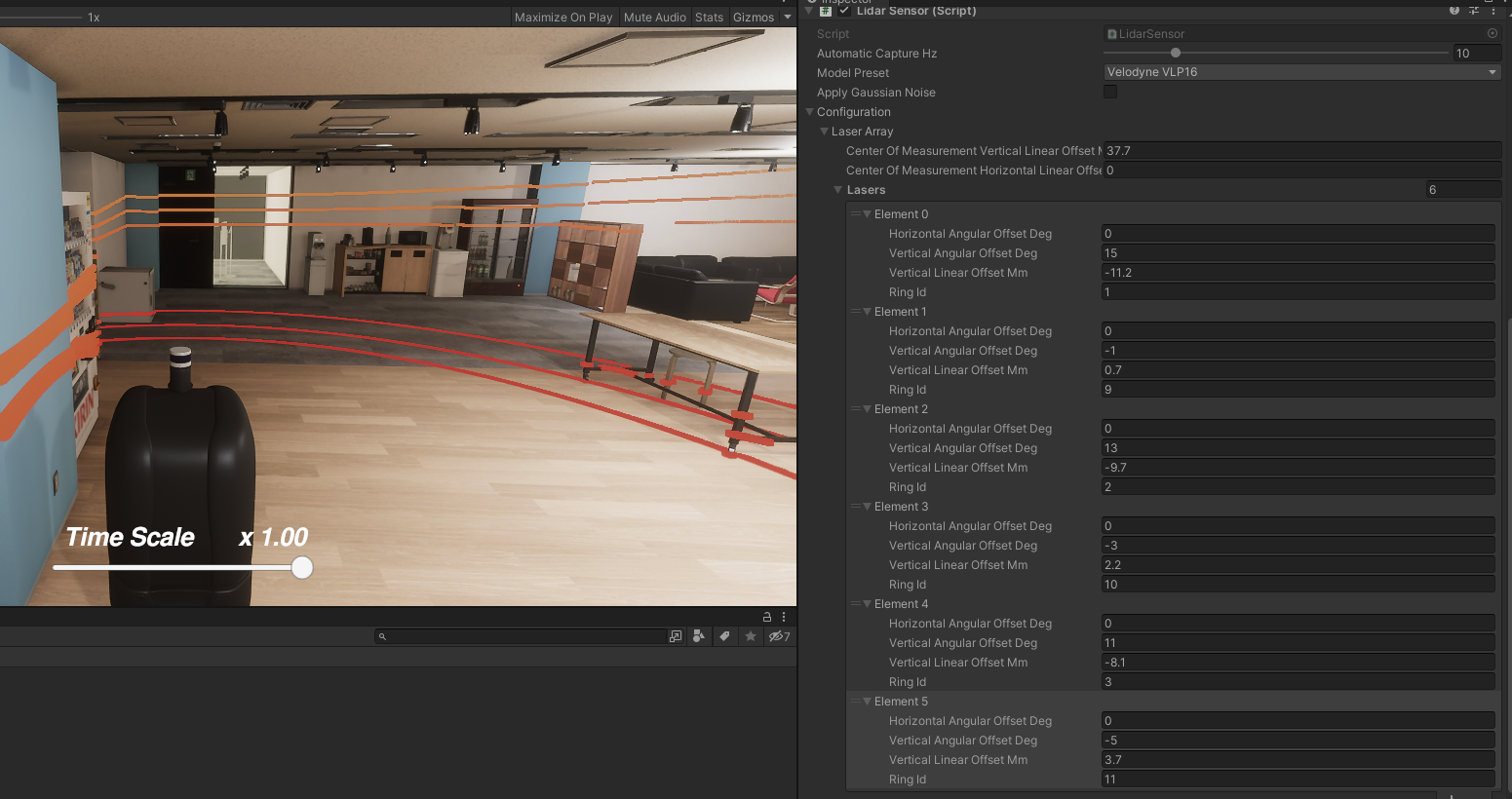
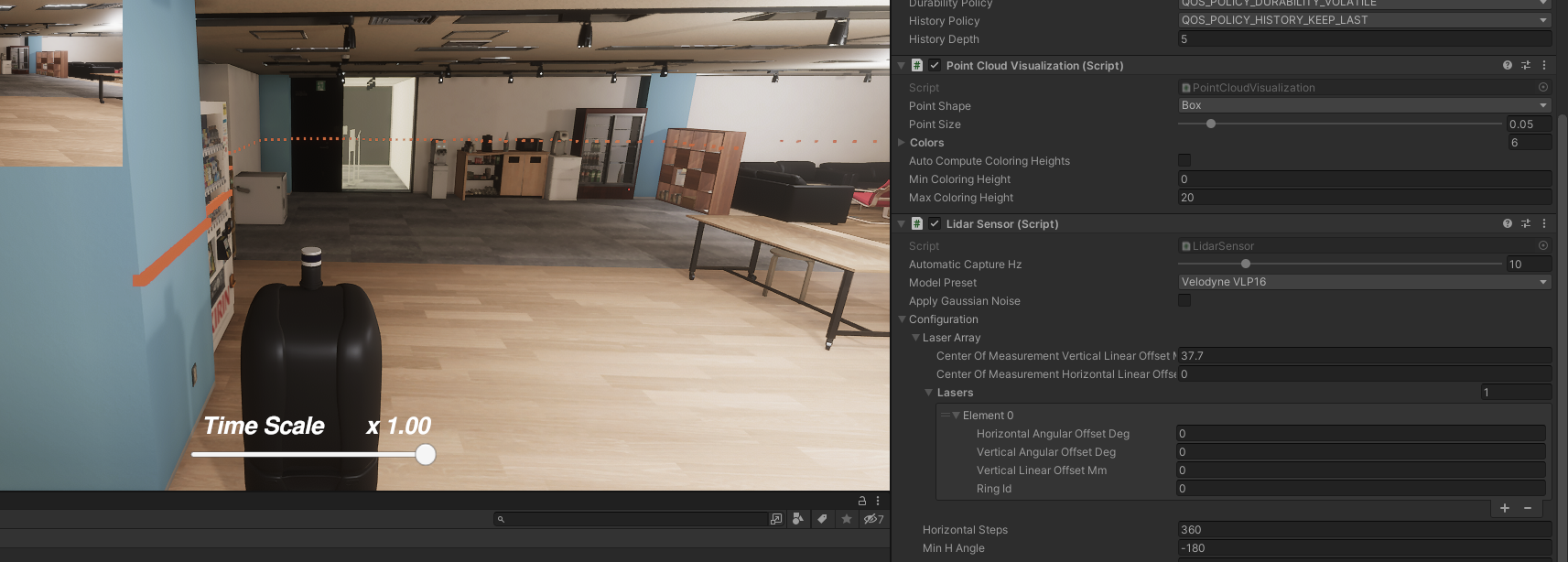
lidar sensorというcomponentがついているので編集していきましょう。

lidar sensorに関する説明は公式ドキュメントにも記載がありました。
参考にしつつ進めて行きます。laserのステップや水平角度、ステップなど設定できそうですね。
Configuration - advanced lidar configuration (in most cases no need to change)
Laser Array - geometry description of lidar array
Horizontal Steps - the number of laser array firings between Min H Angle and Max H Angle
Min H Angle - minimum horizontal angle (left)
Max H Angle - maximum horizontal angle (right)
Max Range - maximum range of the sensor
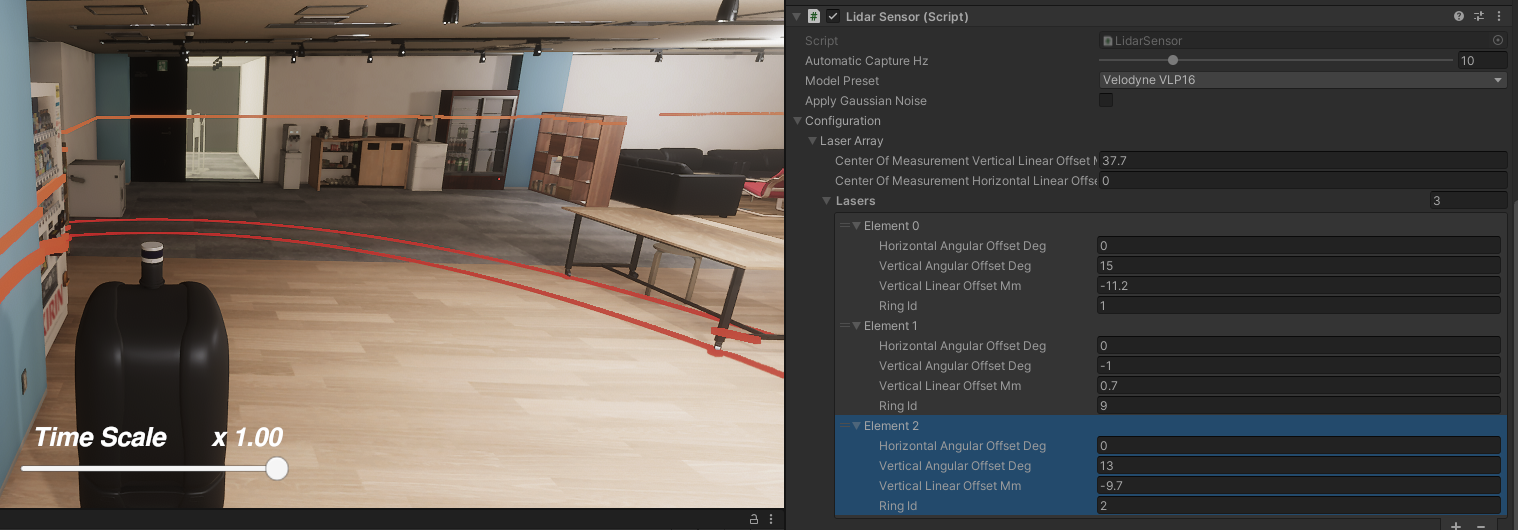
とりあえず縦のラインを大胆に消してみました。
全く違うセンサになってしまったのではないでしょうか?
configを1本だけのこしたら2Dになりました
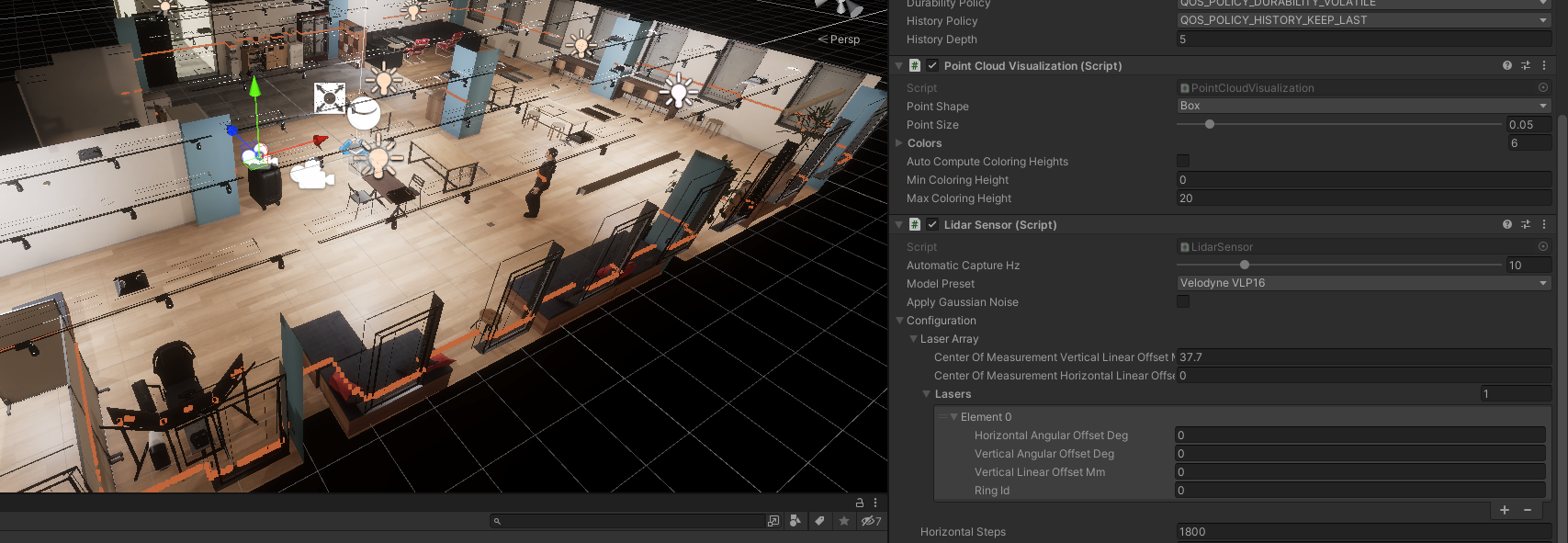
現在のhorizontal stepが1800なので0.2度の解像度担っているようです。
horizontal stepを4にすると90度ごとになりました。
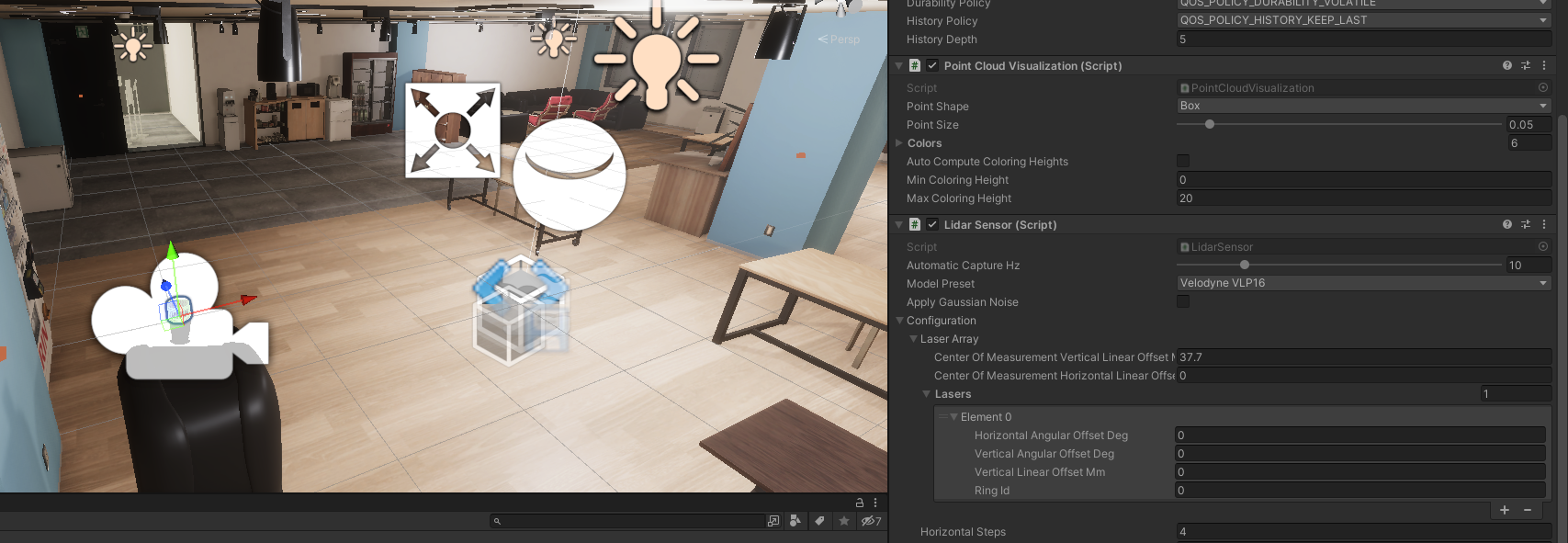
360度の全周囲lidarで1ライン、解像度1度で動かして見ようと思います。
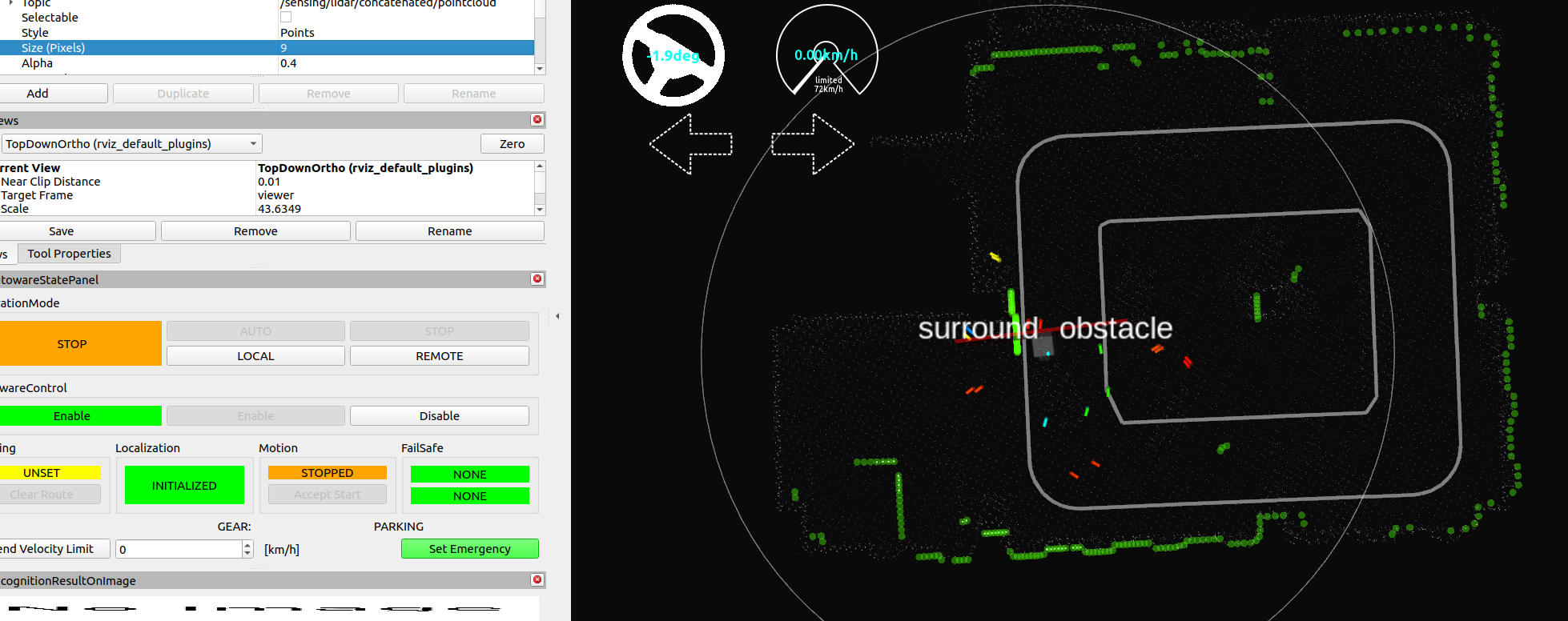
さてbuildしてみます。
Rvizから見てみるとpointcloudが小さいので9とかでかい数字にしてみます。それっぽく自己位置はハマってました
autowareとあわせて実行してみるとなんとか動いてそうです。
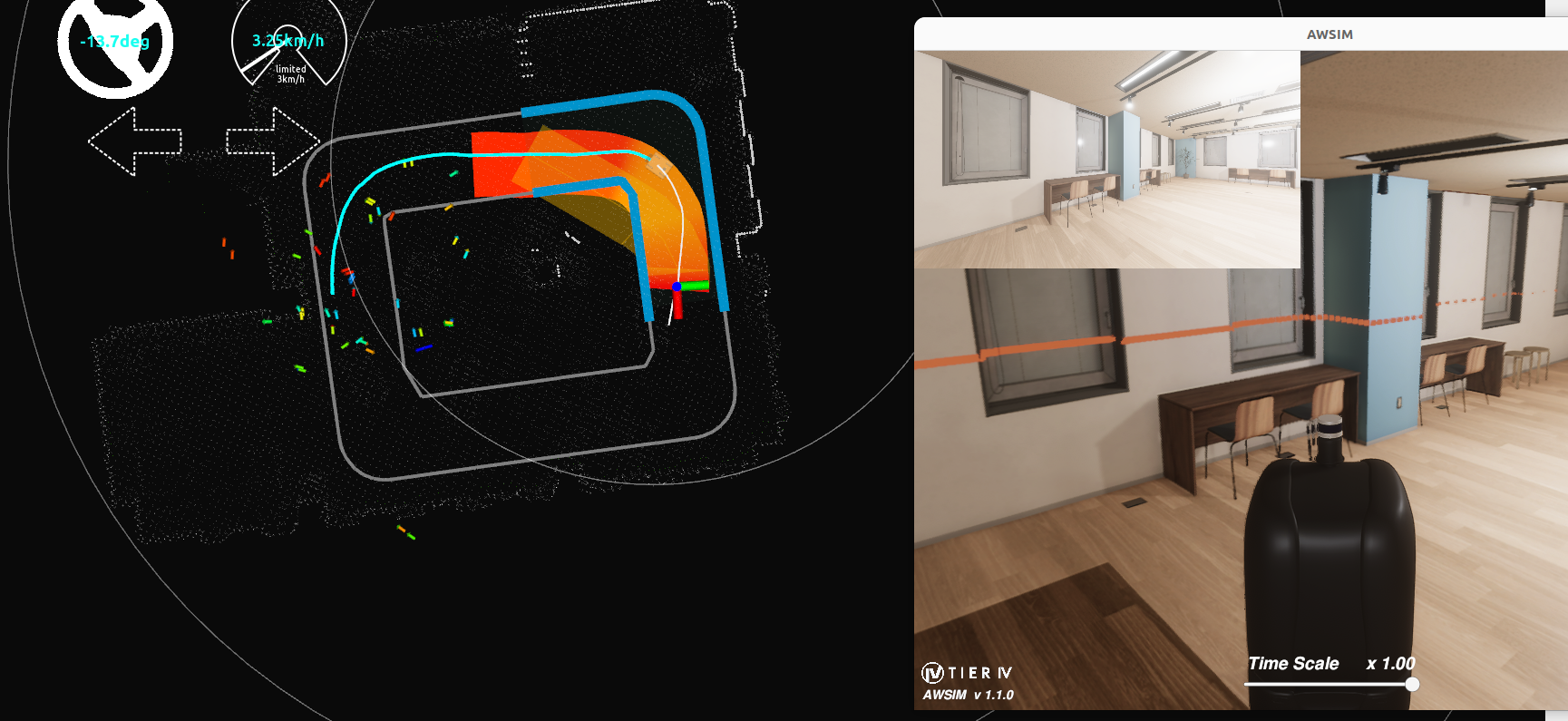
普通に走ると自己位置外れそうなので1km/h程度と低速で走る設定にしています。

終わりに
様々なセンサに合わせて設定を変えてみるとセンサを買う前にテストできそうです。
今出ている以下のセンサ以外にも様々なセンサがあるのでよかったら新しいセンサ構成のPRも出してみてください。
HESAI Pandar40P
HESAI PandarQT64
Ouster OS1-64
Velodyne VLP-16
Velodyne VLC-32C
Velodyne VLS-128-AP