1. 概要

ある時点の物理系の状態から過去の状態を推定する手法のことをInverse Physics Simulationと呼ぶ。従来のシミュレーションでは、初期の状態から未来の物理現象を予測していたが、この手法ではその逆のプロセスを行う。例えば、流体可視化の例では、現在観測された流体の各パーティクルの位置に対して、時間を逆にしてどのような位置にあったかを予測することで、観測時間よりも前の状態を予測することができる。この論文では、拡散モデル(diffusion model)が徐々にノイズを除去して過去の状態を予測することを利用して、物理シミュレーションに転用した。
2. 新規性
従来手法(Inverse Physics Simulation)には、精度や安定性に課題があった。この論文では以下の改善を行っている。
- 段階的逆シミュレーション:物理系の状態を、時間ごとに少しずつさかのぼって推定することで、より正確で時間的に安定した予測を実現している。
- 学習による補正機能:シミュレーションの誤差を補正する機能を拡散モデル(diffusion model)で訓練している。
- 解の分布サンプリング機能:複数の解の可能性を考慮した推定が可能になった。
3. 実現方法

- 物理系の現在の状態を観測する。
- 常微分方程式(SDE)の物理モデルベースのシミュレーターを使って、少し前の状態を推定する。
- 拡散モデルで訓練された補正機能を使って、シミュレーターの誤差を補正する。ここで、Heat Diffusion(熱拡散)方程式を取り入れており、時間とともに情報が失われるような拡散過程を表現し、物理シミュレーションの軌跡にノイズを加えることで失われた詳細を再現できるようにしている。
さらに、障害物のあるケースに対応するために、Buoyancy-driven Flow(浮力駆動流)を導入しており学習されたスコア関数が未知の状況に対して適切な過去の状態を推定できる汎化性を持てるようにしている。特に、非線形な物理現象やランダムな障害物などを含む複雑な系に対して対応できるようにしている。 - 1-3 の手順を繰り返して、さらに過去の状態を推定する。
4. 結果
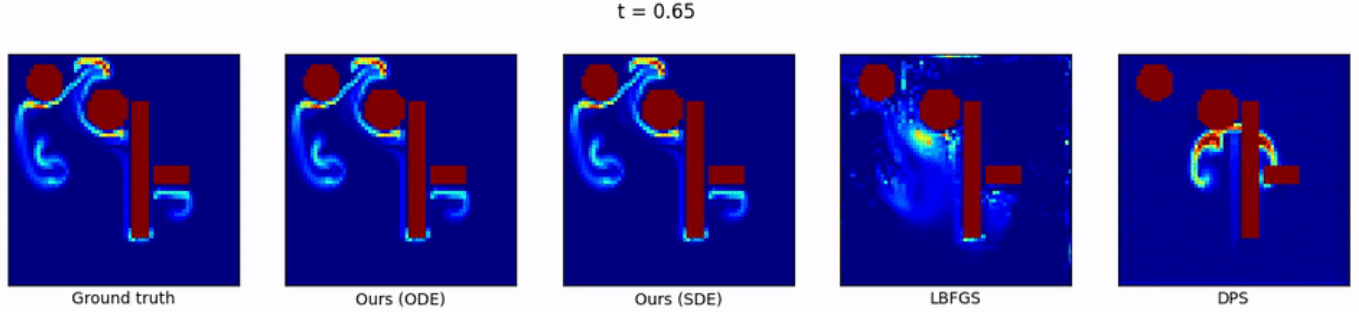




従来の物理シミュレーションベースの手法や拡散モデルベースのものと比較実験をしており、提案手法の方が現在観測された流体情報から過去を予測するときの再構成誤差が最も少ない結果となった。
Paper URL: https://openreview.net/pdf?id=2BpoGPSDCR
last updates: Apr. 25 2024