1980年代のパズルを2025年のテクノロジーで力技で解く
むかしむかし、だいたい今年の暑い夏の頃、実家にバラバラの青い棒のパズルが落ちていました。
3歳がバラバラにしたらしい。
このパズルおじさんが3歳の時からあったやつだぞ。
なおしたいなー。
これはなに?
いまは2025年、YouTubeで解き方動画あるやろ。。。
棒が6本、向きが8パターン、配置が、、、これは、、、、。
検索すると、Burr Puzzleというらしい。
https://burrtools.sourceforge.net/
https://www.puzzle-place.com/wiki/Solving_Burrs
https://www.robspuzzlepage.com/interlocking.htm
https://www.cs.brandeis.edu/~storer/JimPuzzles/BURR/000BURR/READING/IbmPage.pdf
数学的なお楽しみの歴史があるみたいでした。
データ構造
いや、でも、数学は無理ですので、力技で解きます。
先輩たちのWeb情報によると、パズルの構造は以下のようになっています。
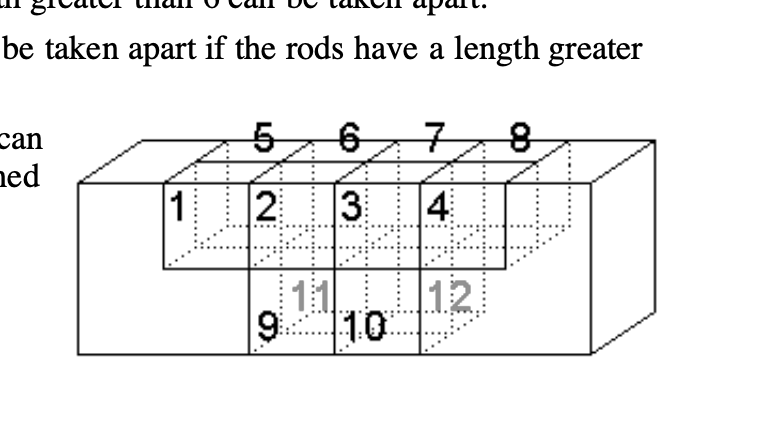
- 棒が6本
- 棒中央の欠けてる部分のルール
- 上2x4
- 下2x2(両端は欠けない)
よって、青いパズルのデータは以下のようになりました。
----
0001
0110
1001
1111
----
0011
0011
1111
1101
----
0000
0001
1111
1101
----
1110
1100
1111
1001
----
1000
0000
1001
1111
----
0001
0011
1101
1111
----
バー1本が占める範囲は2x2x4で、6本がうまくハマると4x4x4の範囲になります。
総当り、の前に
総当りで組み上がるパターンを見つけるだけ!
- 初期位置での回転 4方向
- 初期位置での向き 2パターン
- 配置6箇所の組み合わせ 6 * 5 * 4 * 3 * 2
((4 * 2) ** 6) * (6 * 5 * 4 * 3 * 2) = 1.8億
どうだ?いけるのか?
data.py
marimoノートブックになっています。
marimo edit data.py
- 初期位置での回転+向き → ローカル回転
- 配置6箇所 → グローバル回転
になっていて、
- パズル定義ファイルの読み込み
- 回転と配置をした後のボクセル座標の計算
などがあります。
bits_to_voxels
バーの形状データ → ローカル回転 → グローバル回転 → 配置後の座標に変換する関数です。
回転は90度単位なので、sin/cosのテーブルをつくってnumpyで計算しています。
実際はこれを更にキャッシュを挟んで使っています。
def bits_to_voxels(
bits: np.ndarray,
local_rotation: Rotation,
global_rotation: Rotation,
position: Position,
):
# bits: np.ndarray
assert bits.shape == (4, 4)
voxels = []
for i, bbbb in enumerate(bits):
y = -1 - (i // 2)
z = i % 2 - 1
for x, b in enumerate(bbbb):
if b:
voxels.append([x - 2, y, z])
for x in [-3, 2]:
for y in [-2, -1]:
for z in [-1, 0]:
voxels.append([x, y, z])
# 90度単位の sin/cos 値の事前定義(整数値)
# cos(0°)=1, cos(90°)=0, cos(180°)=-1, cos(270°)=0
# sin(0°)=0, sin(90°)=1, sin(180°)=0, sin(270°)=-1
cos_values = [1, 0, -1, 0]
sin_values = [0, 1, 0, -1]
# ローカル回転の中心点
local_center = [-0.5, -1.5, -0.5]
# 1. ローカル回転を適用
# 回転角度を0-3の範囲に正規化
lrx = local_rotation.x % 4
lry = local_rotation.y % 4
lrz = local_rotation.z % 4
# ローカル回転行列を作成(事前定義された値を使用)
# X軸回転
LRx = np.array(
[
[1, 0, 0],
[0, cos_values[lrx], -sin_values[lrx]],
[0, sin_values[lrx], cos_values[lrx]],
]
)
# Y軸回転
LRy = np.array(
[
[cos_values[lry], 0, sin_values[lry]],
[0, 1, 0],
[-sin_values[lry], 0, cos_values[lry]],
]
)
# Z軸回転
LRz = np.array(
[
[cos_values[lrz], -sin_values[lrz], 0],
[sin_values[lrz], cos_values[lrz], 0],
[0, 0, 1],
]
)
# 合成ローカル回転行列
LR = LRz @ LRy @ LRx
# ローカル回転を適用
local_rotated_voxels = []
for v in voxels:
# 中心点を原点に移動
translated = np.array(
[
v[0] - local_center[0],
v[1] - local_center[1],
v[2] - local_center[2],
]
)
# ローカル回転を適用
rotated = LR @ translated
# 中心点を元に戻す
final = [
rotated[0] + local_center[0],
rotated[1] + local_center[1],
rotated[2] + local_center[2],
]
local_rotated_voxels.append(final)
# 2. グローバル回転を適用
# グローバル回転の中心点
global_center = [-0.5, -0.5, -0.5]
# 回転角度を0-3の範囲に正規化
grx = global_rotation.x % 4
gry = global_rotation.y % 4
grz = global_rotation.z % 4
# グローバル回転行列を作成(事前定義された値を使用)
# X軸回転
GRx = np.array(
[
[1, 0, 0],
[0, cos_values[grx], -sin_values[grx]],
[0, sin_values[grx], cos_values[grx]],
]
)
# Y軸回転
GRy = np.array(
[
[cos_values[gry], 0, sin_values[gry]],
[0, 1, 0],
[-sin_values[gry], 0, cos_values[gry]],
]
)
# Z軸回転
GRz = np.array(
[
[cos_values[grz], -sin_values[grz], 0],
[sin_values[grz], cos_values[grz], 0],
[0, 0, 1],
]
)
# 合成グローバル回転行列
# GR = GRz @ GRy @ GRx
GR = GRx @ GRy @ GRz
# グローバル回転を適用
global_rotated_voxels = []
for v in local_rotated_voxels:
# 中心点を原点に移動
translated = np.array(
[
v[0] - global_center[0],
v[1] - global_center[1],
v[2] - global_center[2],
]
)
# グローバル回転を適用
rotated = GR @ translated
# 中心点を元に戻して、最も近い整数座標に丸める
final = np.round(
[
rotated[0] + global_center[0],
rotated[1] + global_center[1],
rotated[2] + global_center[2],
]
).astype(int)
global_rotated_voxels.append(final.tolist())
# 3. 位置を適用
final_voxels = []
for v in global_rotated_voxels:
final_voxels.append(
[v[0] + position.x, v[1] + position.y, v[2] + position.z]
)
return np.array(final_voxels)
あっているのか?
- 書いたコードがあっているのか?
- データ化したけど実際のパズルと一致してるのか?
- プラスは右回り?左回り?XYZ軸?
見た目で確認できないと確信できませんので、Three.jsで可視化しました。
marimoノートブック内にThree.jsを埋め込んで表示できるようにしました。
marimo edit threejs.py
JSで書いたWidgetをmarimoノートブック内に埋め込める仕組みで、MarimoのUIで変数を変えると、リアクティブにJSの世界に反映させることができます。
with app.setup:
# Initialization code that runs before all other cells
import anywidget
import traitlets
CounterESM = """
function render({ model, el }) {
let button = document.createElement("button");
button.addEventListener("click", () => {
model.set("value", model.get("value") + 1);
model.save_changes();
});
const updateInnerHTML = ()=>{
button.innerHTML = `count=${model.get("value")} data=${model.get("data")}`;
}
updateInnerHTML();
model.on("change:value", () => {
updateInnerHTML();
});
model.on("change:data", () => {
updateInnerHTML();
});
el.appendChild(button);
}
export default { render };
"""
@app.class_definition
class CounterWidget(anywidget.AnyWidget):
_esm = CounterESM
# Stateful property that can be accessed by JavaScript & Python
value = traitlets.Int(0).tag(sync=True)
data = traitlets.List([1, 2, 3]).tag(sync=True)
@app.cell
def _(mo):
count_slider = mo.ui.slider(start=0, stop=100)
return (count_slider,)
@app.cell
def _():
counter_widget = CounterWidget()
return (counter_widget,)
@app.cell
def _(count_slider, counter_widget):
counter_widget.value = count_slider.value
return
総当り
- 初期位置にバーを配置(4パターン)
- 2番目の位置にバーを配置(8パターン)
- ぶつかってるなら次パターン、全パターン終わったら戻る
- ぶつかってないなら
- 3番目の位置にバーを配置(8パターン)
- ぶつかってるなら次パターン、全パターン終わったら戻る
- ぶつかってないなら
- 4番目の位置にバーを配置(8パターン)
- ぶつかってるなら次パターン、全パターン終わったら戻る
- ぶつかってないなら
- 5番目の位置にバーを配置(8パターン)
- ぶつかってるなら次パターン、全パターン終わったら戻る
- ぶつかってないなら
- 6番目の位置にバーを配置(8パターン)
- ぶつかってるなら次パターン、全パターン終わったら戻る
- ぶつかってないなら
- 完成!
総当りとは言っても、ぶつかったパターンの先を計算するのは無駄なので省略します(バックトラック)。
@app.function
def solve(
ctx, bars, placed_bar_and_patterns, bar_indices_to_placement, patterns
):
# print(f"solve {placed_bar_and_patterns} {bar_indices_to_placement}")
solutions = []
bars_temp = []
for placement, (bar_index, pattern) in enumerate(placed_bar_and_patterns):
bar = bars[bar_index]
bar.set_placement(placement)
bar.set_pattern(pattern)
bars_temp.append(bar)
placed_voxcels = bars_to_voxels(bars_temp)
for bar_index in bar_indices_to_placement:
# print(f"bar_index={bar_index}")
new_bar_indices_to_placement = [
bi for bi in bar_indices_to_placement if bi != bar_index
]
for pattern in patterns:
new_bar = bars[bar_index]
new_bar.set_placement(len(placed_bar_and_patterns))
new_bar.set_pattern(pattern)
new_bar_voxels = new_bar.voxels()
has_collision = has_common_fast_numpy(
placed_voxcels, new_bar_voxels
)
new_placed_bar_and_patterns = placed_bar_and_patterns + [
(bar_index, pattern)
]
if has_collision:
pass
else:
if len(new_bar_indices_to_placement) == 0:
solution = new_placed_bar_and_patterns
ctx["callback"]({"solution": solution})
solutions.append(solution)
else:
solutions += solve(
ctx,
bars,
new_placed_bar_and_patterns,
new_bar_indices_to_placement,
patterns,
)
return solutions
完成!
これが2025年のおじさんが力技で解いた青いパズルの192パターンの解だ!
でも、どのバーも動かないんですけど!!デッドロック的な!
(つづく)