概要
ROS を用いた Arduino の制御方法や、その環境構築について解説していきます。
公式のページ:http://wiki.ros.org/rosserial_arduino/Tutorials/Arduino%20IDE%20Setup
説明すること
- ROSでArduinoを制御するための環境構築方法
- Arduinoに組み込むプログラムの内容
動作環境
- Raspberry Pi 4 (4GB)
- Ubuntu server 20.4LTS (64bit)
- ROS Noetic
- ELEGOO R3 UNO (Arduino互換ボード)
環境構築手順
- Arduino IDE のインストール
- 依存パッケージのインストール
- Arduinoライブラリのインストール
- 動作確認
1. Arduino IDE のインストール
1-1. インストール手順
- 下記サイトの『Linux ARM 64bits』から圧縮ファイルをダウンロード
https://www.arduino.cc/en/software - ダウンロードしたファイルをHOMEフォルダに展開
- 展開したフォルダ内の『install.sh』を実行
- デスクトップに『Arduino IDE』のアイコンが作成される
1-2. 動作確認
まずはROSを絡めずに、Arduinoが問題なく動作するかを確認する。
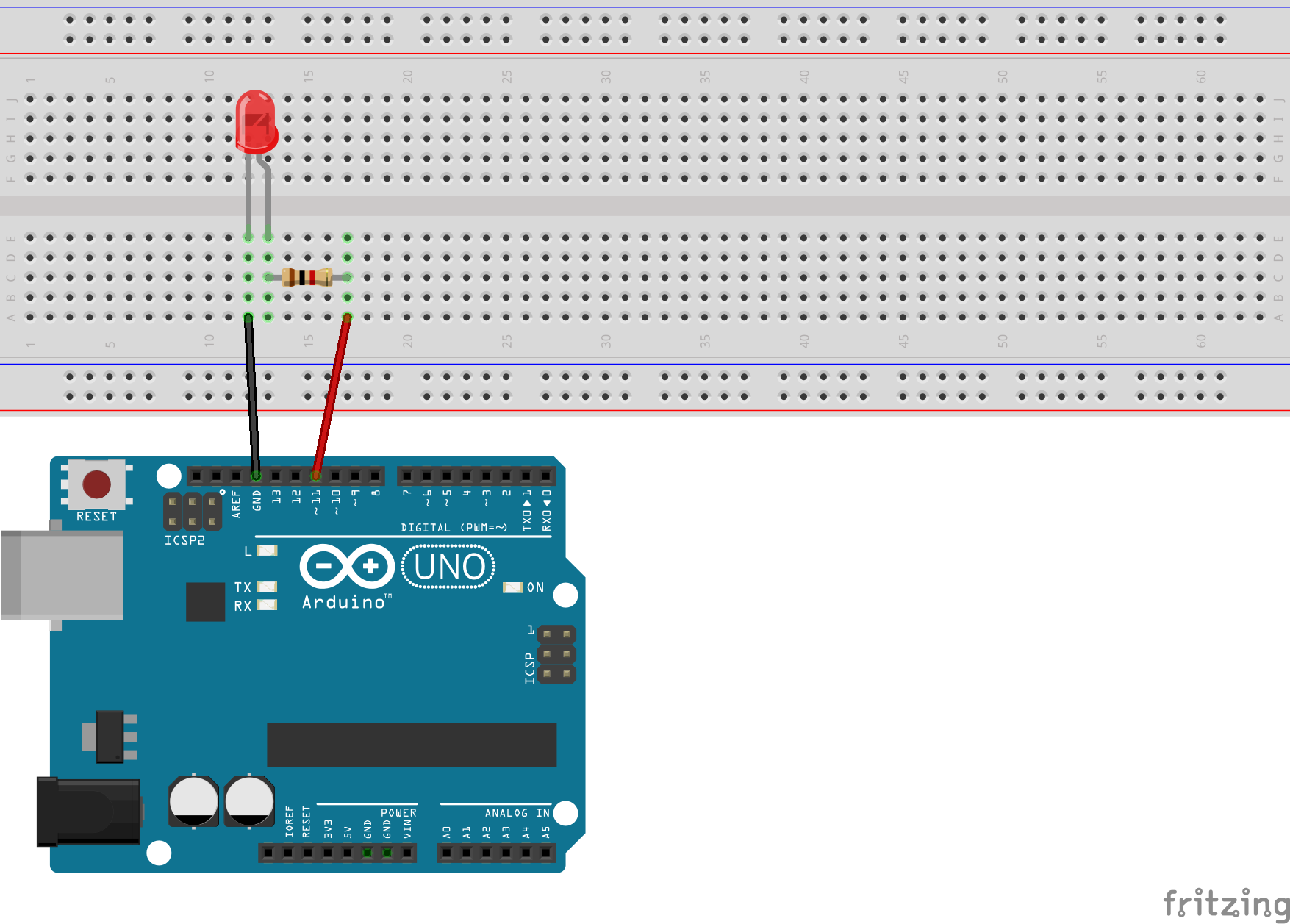
- Arduinoの11番ピンでLEDが光るように配線 (上図)
- Raspberry Pi と Arduino を接続
- ツール ⇒ ボード で対象ボードを設定
- ツール ⇒ シリアルポート 対象ポートを設定
- Arduino IDE を起動し、下記ソースを記述
- コンパイルし、マイコンボードに書き込む
- LEDが点滅すればOK
void setup() {
pinMode(11, OUTPUT);
}
void loop() {
digitalWrite(11,HIGH);
delay(100);
digitalWrite(11,LOW);
delay(100);
}
書き込み時にパーミッションエラーとなる場合、ユーザーを『dialout』グループに所属させる必要がある。
sudo usermod -a -G dialout <ユーザ名>
ここで動作しないなら、設定が間違っているかArduinoが壊れている。
2. ROS依存パッケージのインストール
ROS公式のページを見ると、インストール方法には2種類の方法がある。
- apt によるインストール
- ソースビルドによるインストール
本来は上記のどちらかでインストールできるはずだが、うまく動作しなかったため両方行った。
apt によるインストール
sudo apt install ros-noetic-rosserial-arduino
sudo apt install ros-noetic-rosserial
ソースビルドによるインストール
cd ~/catkin_ws/src
git clone https://github.com/ros-drivers/rosserial.git
cd ~/catkin_ws
catkin_make
※ 公式の方法でトラブル発生
上記のソースビルドの場合、公式では最後にcatkin_make installをしろと書いてある。
が、これを実行すると他パッケージのビルド関連が無効になってしまった。
catkin_make installは無くても動作するため、今回は省略している。
3. Arduinoライブラリのインストール
ライブラリ自体は『Arduino IDE』から取ってくる。(非公式?)
- Arduino IDE を起動
- スケッチ ⇒ ライブラリをインクルード ⇒ ライブラリを管理
- 『rosserial』と検索
- Michael Furguson 氏の『Rosserial Arduino Library』のバージョン0.7.9をインストール
- <ros.h> のインクルードが使用可能
参考ページ:https://answers.ros.org/question/361930/rosserial-arduino-compilation-error-no-cstring/
※ 公式の方法でエラー発生 (Noeticだけかも)
公式では下記方法でライブラリが作成されるが、本環境ではコンパイル時にエラーとなる。
もし上手くいかなかったら、『ros_lib』を削除し、上記の方法でやり直す。
参考までに。
cd Arduino/libraries
rm -rf ros_lib
rosrun rosserial_arduino make_libraries.py .
上記コマンドにより『ros_lib』が生成される。
4. 動作確認
上記までで一通りの動作環境が整ったので、実際に動作するかの確認を行う。
実装内容:PC操作でROSから信号を受け取ったときにLチカする
4-1. Arduino にプログラムを組み込む
下記コードをArduino IDEに記述し、マイコンボードに書き込む。
# include <ros.h>
# include <std_msgs/Empty.h>
ros::NodeHandle nh;
void messageCb( const std_msgs::Empty& toggle_msg) {
digitalWrite(11, HIGH);
delay(100);
digitalWrite(11, LOW);
delay(100);
}
ros::Subscriber<std_msgs::Empty> sub("toggle_led", &messageCb );
void setup(){
pinMode(11, OUTPUT);
digitalWrite(11, HIGH);
nh.initNode();
nh.subscribe(sub);
}
void loop(){
nh.spinOnce();
delay(1);
}
4-2. ROSでの制御
ターミナルを3つ立ち上げ、それぞれ下記コマンドを実行。
1つ目:ROSマスターの起動
roscore
2つ目:ROSシリアル通信の開始
最後の『/dev/ttyACM0』は各環境に合わせる。
rosrun rosserial_python serial_node.py /dev/ttyACM0
3つ目:トピックを送信
コマンドを送信するたびにLEDが光る。
rostopic pub toggle_led std_msgs/Empty --once
ここまで問題なく動作していればOK。
あとはArduinoに組み込むプログラムやROSのパブリッシャーを用意することで、自由に Arduino を制御することが可能となる。
Arduino内のサブスクライバー
Arduino に組み込むプログラムは、『ROSライクな記述ができる』だけであって、ROSとは記述方法が異なる。
が、だいたいは通常のパブリッシャー・サブスクライバーと同じように記述することになる。
上記で使用したコードを例に解説を行う。
PC内の ROS からトピックを受け取ってLチカするという事は、**『Arduino内ではサブスクライバーが実行されている』**と考えてもらいたい。
各コードの解説
ROSヘッダー、トピックの型のインクルード
ROSヘッダーは必須。
以降は使用するトピックに合わせて必要な分だけインクルードする。
# include <ros.h>
# include <std_msgs/Empty.h>
ROSノードハンドルの宣言
setup関数、loop関数の両方で使用するため、グローバル変数として宣言する。
ros::NodeHandle nh;
コールバック関数
トピックを受け取った時の動作内容をコールバック関数内に記載する。
普段 Arduino に記述している内容はここに書くことが多くなる。
void messageCb( const std_msgs::Empty& toggle_msg) {
digitalWrite(11, HIGH);
delay(100);
digitalWrite(11, LOW);
delay(100);
}
トピックとコールバック関数を紐付け
サブスクライバーに、上記で作成したコールバック関数とトピック名を紐付ける。
本家と異なり、サブスクライバー宣言時にトピックの型を指定する必要がある。
サブスクライブするトピックの名前や型を変更する場合、ここで指定する。
ros::Subscriber<std_msgs::Empty> sub("toggle_led", &messageCb );
setpu関数 (初期化)
Arduino 起動時に一度だけ実行される関数。
通常の Arduino の初期化コードに加え、ノードハンドルの初期化、サブスクライバーの追加を行う必要がある。
void setup(){
pinMode(11, OUTPUT);
digitalWrite(11, HIGH);
nh.initNode();
nh.subscribe(sub);
}
loop関数 (無限ループ)
Arduino 起動中に繰り返される関数。
基本的にはコールバック関数を実行するためのnh.spinOnce();を記述するだけで良い。
void loop(){
nh.spinOnce();
delay(1);
}
参考ページ
http://wiki.ros.org/rosserial_arduino/Tutorials
https://qiita.com/nnn112358/items/059487952eb3f9a5489b