免責
この記事に従って発生した如何なる損害も筆者は負うことができません。ご免なさい。
目標
秋月電子通商さんで手軽に買えるAVRマイコンをコンソールなどCUI/CLIでArduino風に取り扱える環境を整えたいです。この記事ではATtimy13Aを例にしています。
私は今のところATmega328P、ATmega88V、ATtiny2313、ATtiny85、ATtiny13Aを使って、この環境で遊んでいます。
準備するもの
Debian/Ubuntu環境
どちらかを用意してください。いわゆるlinuxです。
まだWindowsで、この記事と同じことをする方法は書けていません。ただしVirtualBox使えば解決。
あるいは、Arduinoを使う場合だけWSLも使えるようです。
- パソコン (VirtualBoxでも可)のDebian/Ubuntu
- RaspberryPiなどのLinuxBoxのDebian/Ubuntu
AVRライター
どれか、ひとつ以上を用意してください。私は専用AVRライターを持っていないので紹介できません。ごめんなさい。
- Arduinoボード (Arduino Nano)
- AE-UM232R (FT232RL USBシリアル変換モジュール)
- RaspberryPiなどのGPIO
AVRマイコンと電子工作DIYセット
これらは必要最低限のものです。デジタルトランジスタやスイッチがあると、より楽しいです。
- AVRマイコン (ATtiny13A)
- ブレッドボードとワイヤ
- 抵抗入りLED(もちろんLEDと抵抗(220Ω以上かな)でも可) (抵抗入りLED)
動かすモノ
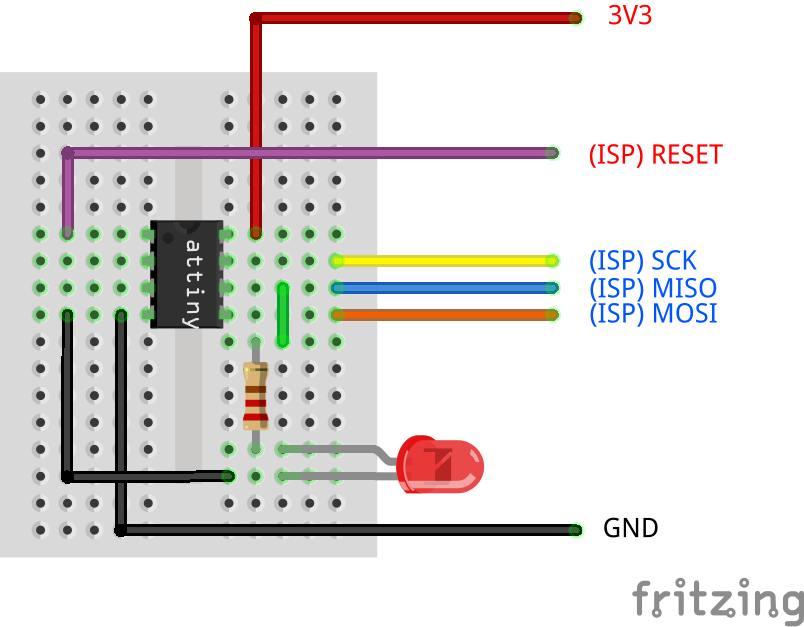
動かす回路
D1ピンにLEDを直接つないでLチカをします。図ではLEDと抵抗が別になっていますが、抵抗入りLEDの方が簡単で省スペースです。
トランジスタを使って別電源でLEDを点けるとPWMを使わずに明るさを調整できます。
回路が完成した後は、RESETやSCK、MISO、MOSIは不要です。
動かすスケッチ(プログラム)
D1ピンにLEDをつなぐので、こんなスケッチになります。
void setup() {
pinMode(1, OUTPUT);
}
void loop() {
digitalWrite(1, HIGH);
delay(1000);
digitalWrite(1, LOW);
delay(1000);
}
共通の準備
- python3-pipのインストール
(公式によるとplatformioは2.7のみサポートだそうです) - [platformioのインストール] (http://docs.platformio.org/en/latest/installation.html)
- ワークスペースの作成
$ sudo apt install -y python3-pip
$ pip3 install --user --upgrade platformio
$ ~/.local/bin/platformio --version
PlatformIO, version 4.1.0
$ ~/.local/bin/platformio platform install atmelavr --with-package tool-avrdude
なお、上記のように--userを付けてpip installする場合はplatformioがユーザーのローカルにインストールされるので、~/.local/binが実行パス(${PATH})に含まれている必要があります。 ~/.local/binは、${PYTHONUSERBASE}で変更している可能性があります。
platformioをアンインストールするには「pip3 uninstall platformio」です。
$ mkdir attiny13work
$ cd attiny13work
$ pio init -b attiny13
$ vi src/main.ino # ~スケッチ(main.ino)を前述の通りに作成~
$ vi platformio.ini # ~platformio.iniを「それぞれの準備」の通りに編集~
$ pio run # ここで色々とインストールされるかも
↓のファームウェアの書き込みの前に後述の準備をしてください。
$ pio run -t upload # ←これは、それぞれの準備ができていないと正常に動作しません。
なお、uploadではなくprogramを使うようです。私は、ずっとuploadを使っていてエラーが出ていました。
それぞれの準備
Arduino Nano(arduino)の場合
準備
Arduinoボード(互換でも可)をAVRライターとして使うために予めArduinoボードにArduinoISPソフトウェアを書き込んでおきます。
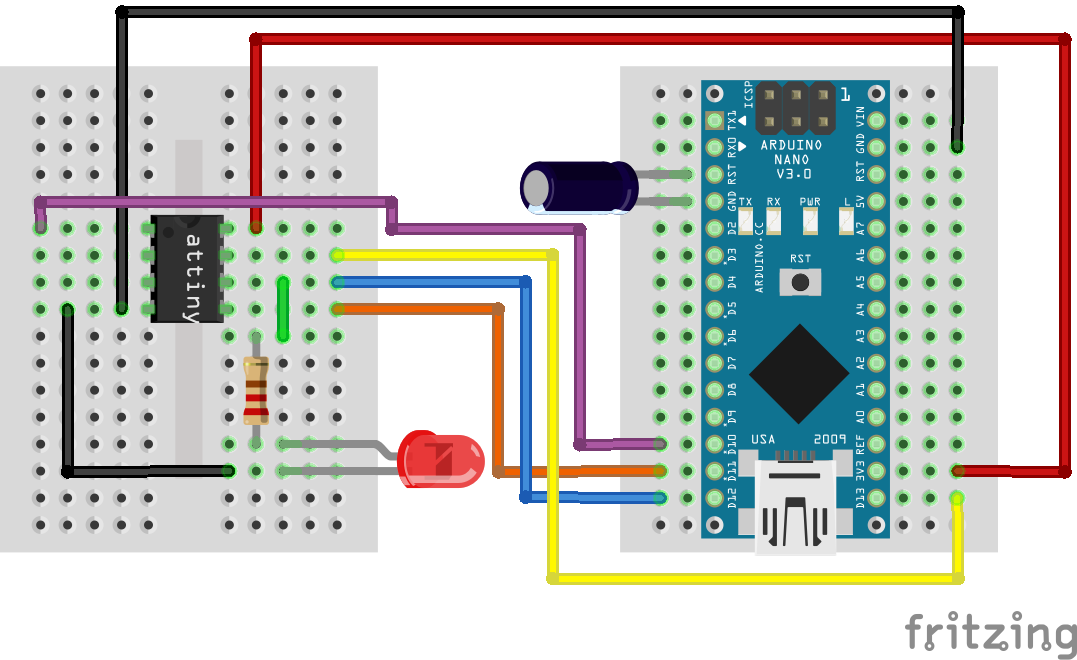
接続図 (arduino)
コンデンサを挿したままだとArduinoISPの書き込みに失敗します。
ただしAVRマイコンを書き換えるときにはコンデンサを挿してください。
PlatformIO設定 (arduino)
以前upload_protocol = arduinoispとしていて動きませんでした。
[env:attiny13]
platform = atmelavr
framework = arduino
board = attiny13
;board_build.f_cpu = 8000000L
board_build.f_cpu = 1000000L
upload_protocol = arduino
確認 (arduino)
正しく接続できていれば、AVRマイコンのfuse設定値などの情報を表示することができます。
$ ~/.platformio/packages/tool-avrdude/avrdude -c arduino -p t13
AE-UM232R(arduino-ft232r)の場合
準備
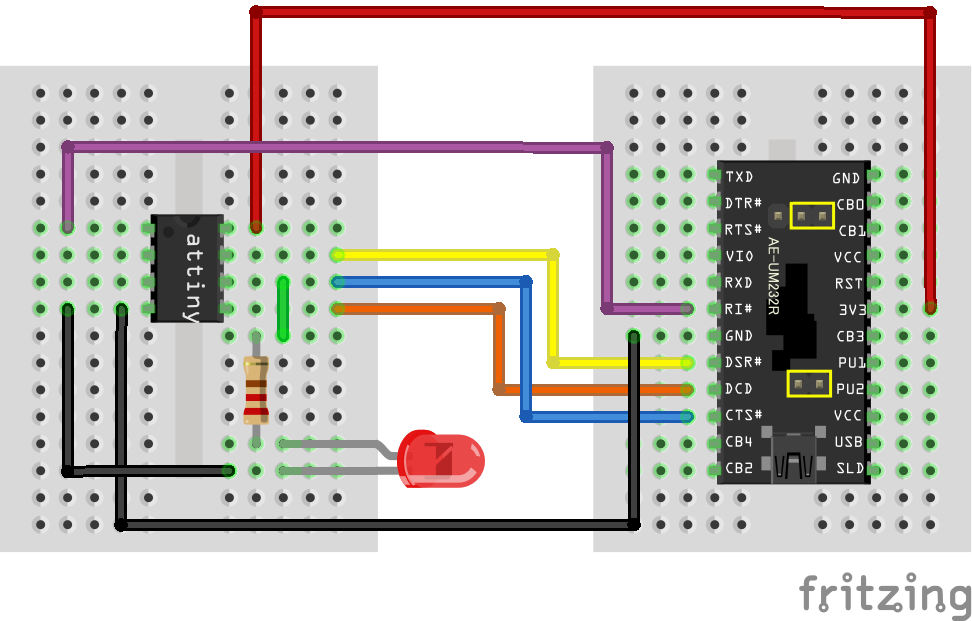
AE-UM232RのJ1を図のように、いじって3.3V出力に変えましょう。
3.3VになっているかDSR#などをテスターで確認してください。
- J1で信号を3.3V出力に変更
接続図 (arduino-ft232r)
PlatformIO設定 (arduino-ft232r)
[env:attiny13]
platform = atmelavr
framework = arduino
board = attiny13
;board_build.f_cpu = 8000000L
board_build.f_cpu = 1000000L
upload_protocol = arduino-ft232r
upload_port = ft0
upload_speed = 300
確認 (arduino-ft232r)
正しく接続できていれば、AVRマイコンのfuse設定値などの情報を表示することができます。
$ ~/.platformio/packages/tool-avrdude/avrdude -c arduino-ft232r -b 300 -p t13
GPIO(linuxgpio)の場合
準備 (linuxgpio)
linuxgpioでは、どのピンを何に使うのか設定するために~/.avrdudercを用意してください。
avrdudeを実行したときに「Can't export GPIO 17, already exported/busy?: Invalid argument」などのエラーが出ることがあります。これはavrdudeがlinuxgpioに対応していない可能性があります。このときはaptのavrdudeパッケージを使うように~/.platformio以下のavrduddeコマンドを置き換えてみて下さい。
あと「*** [upload] could not open port ft0: [Errno 2] No such file or directory: 'ft0'」というエラーが出ることがあります。platformio.iniと同じディレクトリにft0をtouchで作成してみてください。
- ~/.avrdudercを用意
- 場合によってはavrdudeを置き換え
- ft0をtouchして作成する
programmer
id = "linuxgpio";
desc = "Use the Linux sysfs interface to bitbang GPIO lines";
type = "linuxgpio";
sck = 2; # ここは環境に合わせて変更してください
miso = 3; # ここは環境に合わせて変更してください
mosi = 4; # ここは環境に合わせて変更してください
reset = 17; # ここは環境に合わせて変更してください
;
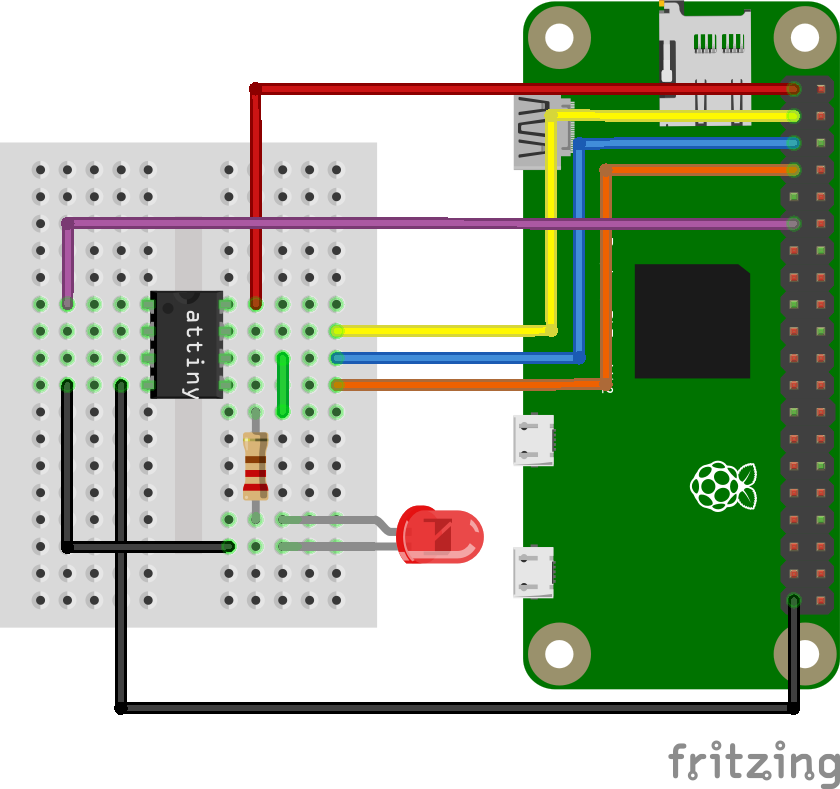
接続図 (linuxgpio)
RaspberryPiでは、前述の~/.avrdudercを設定して、このように接続します。
PlatformIO設定 (linuxgpio)
[env:attiny13]
platform = atmelavr
framework = arduino
board = attiny13
;board_build.f_cpu = 8000000L
board_build.f_cpu = 1000000L
upload_protocol = linuxgpio
upload_port = ft0
upload_speed = 300
確認 (linuxgpio)
正しく接続できていれば、AVRマイコンのfuse設定値などの情報を表示することができます。
$ ~/.platformio/packages/tool-avrdude/avrdude -c linuxgpio -p t13
うまく動かないとき
AE-UM232R(arduino-ft232r)でISPの代わりは割と微妙
特に、ATtiny13Aを1.2MHzで動かしているとfuseが読めなかったり、反応が悪いことがあります。
arduinoやlinuxgpioの方が、いいかも。
avrdudeコマンドにルート権限がないとダメ
avrdudeコマンドにルート権限がないと駄目なことがあるようです。
linuxgpioの場合は「Can't open gpioX/direction: Permission denied」や「Can't export GPIO 17, already exported/busy?: Invalid argument」などのエラーが出ます。後者のメッセージはavrdudeが一度gpioへのアクセスに失敗した後出ます。
$ sudo adduser `whoami` dialout
$ sudo chmod a+s `which avrdude`
$ sudo chmod a+s ~/.platformio/packages/tool-avrdude/avrdude
$ echo 17 > /sys/class/gpio/unexport # 前述の~/.avrdudercを設定した場合
$ echo 2 > /sys/class/gpio/unexport # 前述の~/.avrdudercを設定した場合
$ echo 3 > /sys/class/gpio/unexport # 前述の~/.avrdudercを設定した場合
$ echo 4 > /sys/class/gpio/unexport # 前述の~/.avrdudercを設定した場合
PlatformIOのavrdudeがlinuxgpioに対応していない
、PlatformIOのavrdudeコマンドがlinuxgpioに対応していない可能性があります。
その場合は、aptのavrdudeパッケージをインストールしてみて下さい。そして~/.platformio以下のavrdudeコマンドと置き換えてみて下さい。
ただし「--with-package tool-avrdude」を付けてplatformioをインストールしていない場合は、「pio run -t program」した後でないと、~/.platformio以下のavrdudeが配置されませんのでご注意を。
$ sudo apt install -y avrdude
$ pushd ~/.platformio/packages/tool-avrdude
$ mv avrdude avrdude.old
$ popd
RaspberryPI Zero Wの新しいaptのavrdudeだとAE-UM232Rが動かなかった
RaspberryPI Zero W用のavrdude=6.3+r1425-1+rpt1バージョンでは「avrdude: ft245r_open(): invalid device identifier ' '」というようなエラーが出ました。代わりにavrdude=6.3-2バージョンを入れました。
$ apt-cache madison avrdude
avrdude | 6.3+r1425-1+rpt1 | http://archive.raspberrypi.org/debian stretch/main armhf Packages
avrdude | 6.3-2 | http://raspbian.raspberrypi.org/raspbian stretch/main armhf Packages
$ sudo apt install -y --allow-downgrades avrdude=6.3-2
$ sudo apt-mark hold avrdude
なお、sudo apt-mark unhold avrdude && sudo apt upgradeで、元に戻せます。
その他のメモ
ここの情報は確認が不足しているので自信がありません。
AVRマイコンの種類とplatform ID
http://docs.platformio.org/en/latest/platforms/atmelavr.html
delay関数はの_delay_ms関数で代用してます。INPUT_PULLUPはpinMode関数でINPUTにしてからdigitalWrite関数でHIGHにします(後述)。
↓は「pio boards」で出力した結果をまとめたものです。
| AVRマイコン | platform ID | avrdude partno | 特徴 |
|---|---|---|---|
| ATtiny13A | attiny13 | t13 | INPUT_PULLUPなし |
| ATiny85 | attiny85 | t85 | |
| ATmega328P | pro8MHzatmega328 | m328p | |
| ATmega88V | bob3 | m88 | delay関数なし |
AVRマイコンのfuse設定値(書き換え危険)
fuse設定は特に注意です。失敗すると12Vが必要になったり、ISPが使えなくなったり、外部クロックが必要になったり大変な目に会います。
まだまだ未確認です。fuseの値は確認してください。
| AVR | Hz | Ex | Hi | Lo |
|---|---|---|---|---|
| ATtiny13A | 1.2MHz | - | FF | 6A |
| ATtiny13A | 9.6MHz | - | FF | 7A |
| ATtiny85 | 1MHz | FF | DF | 62 |
| ATtiny85 | 8MHz | FF | DF | e2 |
| ATtiny85 | 16MHz | Fe | DD | e1 |
| ATmega328P | 1MHz | FF | D9 | 62 |
| ATmega328P | 8MHz | FF | D9 | e2 |
| ATmega88V | 1MHz | F9 | DF | 62 |
| ATmega88V | 8MHz | F9 | DF | e2 |
最後に
これは自分のためのメモですが、なるべく拡充していこうと思います。
参考
みなさまのおかげです。
Qiita
Debian 系であえて古い APT パッケージをインストールする方法
pipに--userをつけた時のインストール先を変える
ATTiny13Aのデータシート
内蔵プルアップ抵抗あり(1.1.3 Port B (PB5:PB0)
内蔵プルアップ抵抗値は20kΩ~50kΩ (Table 18-1)
http://ww1.microchip.com/downloads/en/DeviceDoc/doc8126.pdf
意外と知られていない?INPUT_PULLUP
INPUT_PULLUPが便利
http://mag.switch-science.com/2013/05/23/input_pullup/
Digital Pins
INPUT_PULLUPが無いときはINPUTにしてからHIGHにする
https://www.arduino.cc/en/Tutorial/DigitalPins
Fritzing.org
回路を描くためのツールです
http://fritzing.org
DENSIKIT.COMさんのAE-UM232Rの電子パーツ
こういうものを作れるのは凄いですね
https://sites.google.com/a/densikit.com/ds/home/fritzing