ラジコンの動かし方がわからない
それっぽく点群の表示ができましたが、本体はどうやって動かせば良いのかよくわかりません。
JOYパッドを使ってモーターを動かすところからやってみるのが近道?
JOYパッドの入力をROSで確認します
大変ためになるこちらのページを参考にJOYパッドを使えるようにします。
ただし、私はmelodicを使っているので、その部分は変更しながら打ち込みます。
ROS講座07 joyプログラム
JOY用のパッケージのインストール
sudo apt-get install ros-melodic-joy
sudo apt-get install ros-melodic-joystick-drivers

ROS講座07と同様に3つのターミナルに打ち込みます。
roscore
rosrun joy joy_node
rostopic echo /joy
ボタンを押すと、ずらずら数字が流れてボタンの入力が流れます。
ROSでJOYパッドの入力を取るのはすごく楽ですね。
ROSのプログラムを作るために、自分のパッケージを作ります。
cd catkin_ws/src
catkin_create_pkg mypackage std_msgs rospy roscpp
ROS講座07 joyプログラム
ここを参考にJOYパッドからの入力を取るコードを書きます。
cd ~/catkin_ws
catkin build
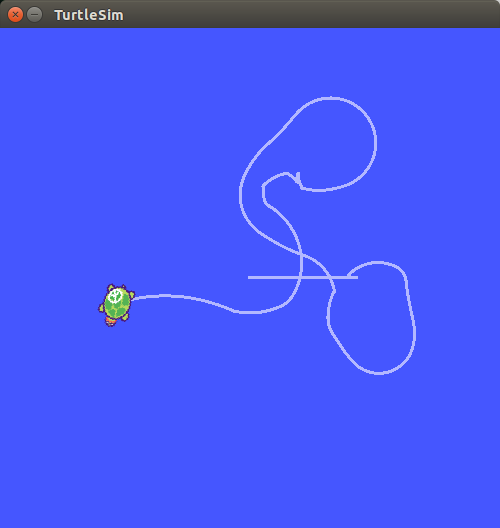
方向転換のボタンが左のアナログボタンに配置されていて使いにくいですが、それっぽく亀が動かせます。
次はモーターを動かしたいですね。
pip3が入ってなかったのでインストールしてモータドライバを入れます。
sudo apt-get install python3-pip
pip3 install Adafruit_PCA9685 --user
sudo i2cdetect -y -r 1
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: 40 -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: 70 -- -- -- -- -- -- --
I2Cが接続されていることを確認します。