ピエゾ振動センサーを使う その2
概要
の続き。実際にセンシングして、I2Cで別のArduinoにデータを飛ばす
Seeeduino V4のsketch
#include <Wire.h>
#define SLAVE_ADDRESS 0x08
const int ledPin=13;
int high_count=0;
void setup() {
Wire.begin();
Serial.begin(9600);
pinMode(ledPin,OUTPUT);
}
void loop() {
int sensorState = digitalRead(2);
delay(100);
if(sensorState == HIGH)
{
high_count++;
if(high_count>10){
Serial.println("send");
Wire.beginTransmission(SLAVE_ADDRESS);
Wire.write("HELP ME!");
Wire.endTransmission(SLAVE_ADDRESS);
}
digitalWrite(ledPin,HIGH);
}
else
{
digitalWrite(ledPin,LOW);
high_count=0;
}
}
APIはここを見る
ピエゾセンサはGroveのベースシールドHATのD2なので、digitalRead(2)で読む。
読めるのはHIGH(1)とLOW(0)になる。
HIGHを検知している間はdigitalWrite()で13PinのLEDを点灯させる。
Seeeduinoの場合は青色が光る。
だいたい100ミリ周期で10回HIGHを検知したら、I2Cで「HELP ME!」を送る。
送り方は
Wireを使って、スレーブである0x08に対してbeginTransmission()で送信して、endTransmission()で終わる
Arduino Uno R4 wifiのsketch
#include <Wire.h>
#include "Arduino_LED_Matrix.h" // Include the LED_Matrix library
#include "frames.h" // Include a header file containing some custom icons
#define SLAVE_ADDRESS 0x08
volatile bool newData = false;
char receivebuffer[32];
ArduinoLEDMatrix matrix; // Create an instance of the ArduinoLEDMatrix class
void setup() {
Wire.begin(SLAVE_ADDRESS); // join I2C bus with address #8
Wire.onReceive(receiveEvent); // register event
Serial.begin(9600); // start serial for output
matrix.begin();
pinMode(LED_BUILTIN, OUTPUT);
}
void loop() {
//Serial.println("on");
digitalWrite(LED_BUILTIN, (millis() / 500) % 2 );
matrix.loadFrame(chip);
delay(500); // Pause for 500 milliseconds (half a second)
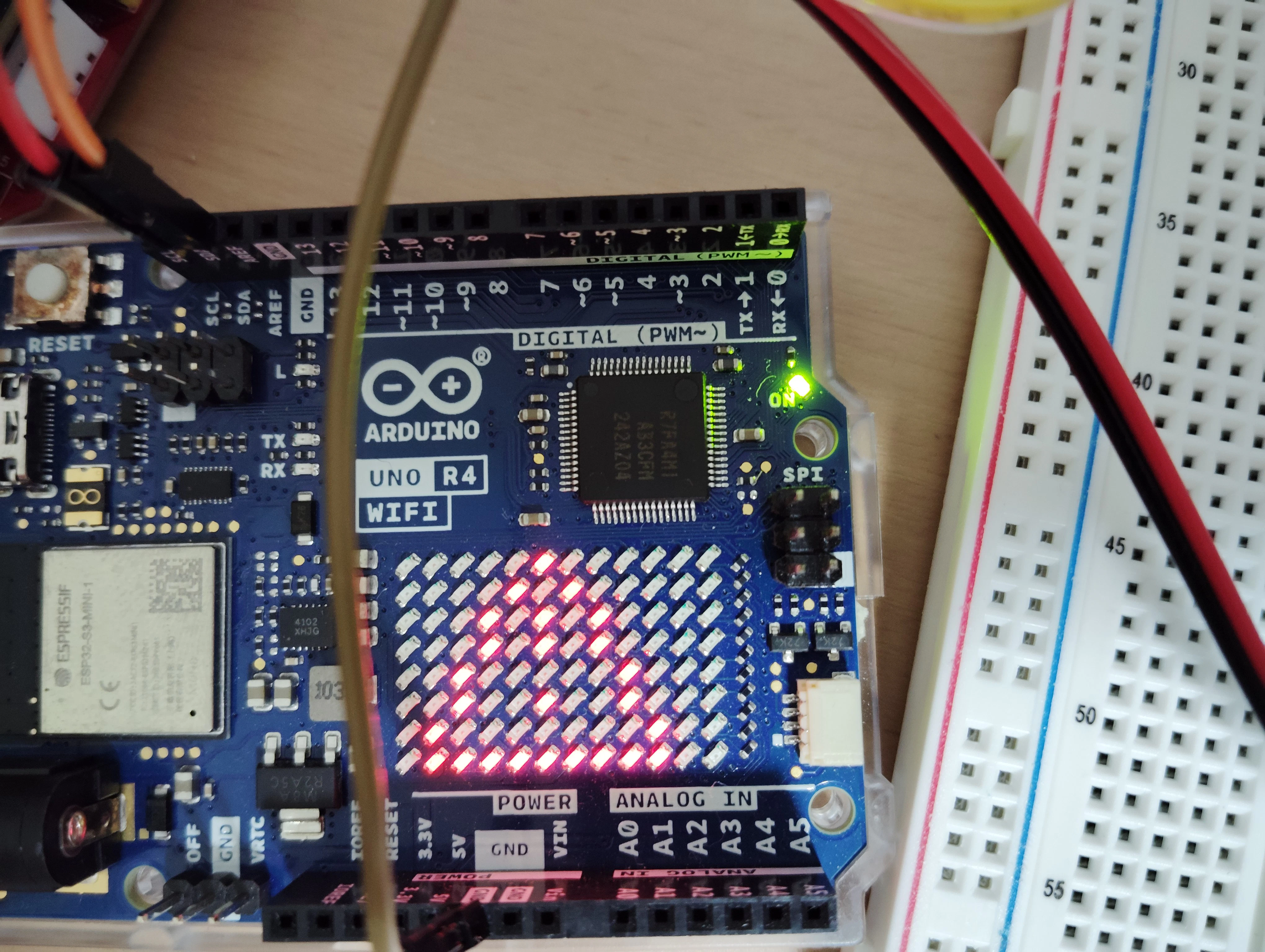
matrix.loadFrame(LEDMATRIX_HEART_BIG);
delay(500);
if (newData){
Serial.print("Recieved: ");
Serial.println(receivebuffer);
matrix.loadFrame(danger);
delay(3000);
newData = false;
}
matrix.clear();
delay(1000);
}
includeしているframe.hはローカルで以下を作る
const uint32_t chip[] = {
0x1503f811,
0x3181103,
0xf8150000
};
const uint32_t danger[] = {
0x400a015,
0x1502082,
0x484047fc
};
const uint32_t happy[] = {
0x19819,
0x80000001,
0x81f8000
};
const uint32_t heart[] = {
0x3184a444,
0x44042081,
0x100a0040
};
こうすると、マスタ側から送られたI2Cをトリガにして、割り込みが発生してフラグをたてる。
loopに戻って、割り込みがあればシリアルとLEDの処理を行う。
wifiでJsonを送信
でwifiでのJson送信のサンプルを作った。
無事JsonをHTTPサーバへ送ることができた。
HTTPサーバは
を使った。
困ったこと1 I2Cのスレーブが見つからない!!
SeeeduinoのI2CのGroveポートは4つあり、内部ですべて同じ回路につながっている。
ので、I2CのGroveポートはどこを使っても、接続先のSlaveのアドレスで認識できる。
が、どんなに頑張ってもArduino Uno R4 Wifiが見つからないので、HELP ME!が届かない。
i2cscannerで相手を探す
Seeeduinoに以下のsketchを書いて、スレーブが見つかるかを確認する
#include <Wire.h>
void setup()
{
Wire.begin();
Serial.begin(9600);
Serial.println("\nI2C Scanner");
}
void loop()
{
byte error, address;
int nDevices;
Serial.println("Scanning...");
nDevices = 0;
for (address = 1; address < 127; address++ )
{
Wire.beginTransmission(address);
error = Wire.endTransmission();
if (error == 0)
{
Serial.print("I2C device found at address 0x");
if (address < 16)
Serial.print("0");
Serial.print(address, HEX);
Serial.println(" !");
nDevices++;
}
else if (error == 4)
{
Serial.print("Unknown error at address 0x");
if (address < 16)
Serial.print("0");
Serial.println(address, HEX);
}
}
if (nDevices == 0)
Serial.println("No I2C devices found\n");
else
Serial.println("done\n");
delay(5000); // wait 5 seconds for next scan
}
この結果は
「No I2C devices found」
だったので、やはりi2cの相手が見えていなかった。
そこで、次のデバッグへ。
デバッグ2 結線を変える。
最初は[Seeeduino]-(GROVE)----(qwiic)-[Arduino Uno]で行けるだろうと思って、
を買ってみた。
が、I2Cの規格はシリアルデータ (SDA) とシリアルクロック (SCL) とVCC、GNDであり、Grove-qwiicでボードをつないでしまうと、その4本が直結する。
つまり、お互いのVCCで給電がぶつかるので、電流の回り込みが起きてしまう。
これは良くないので、接続を見直し。
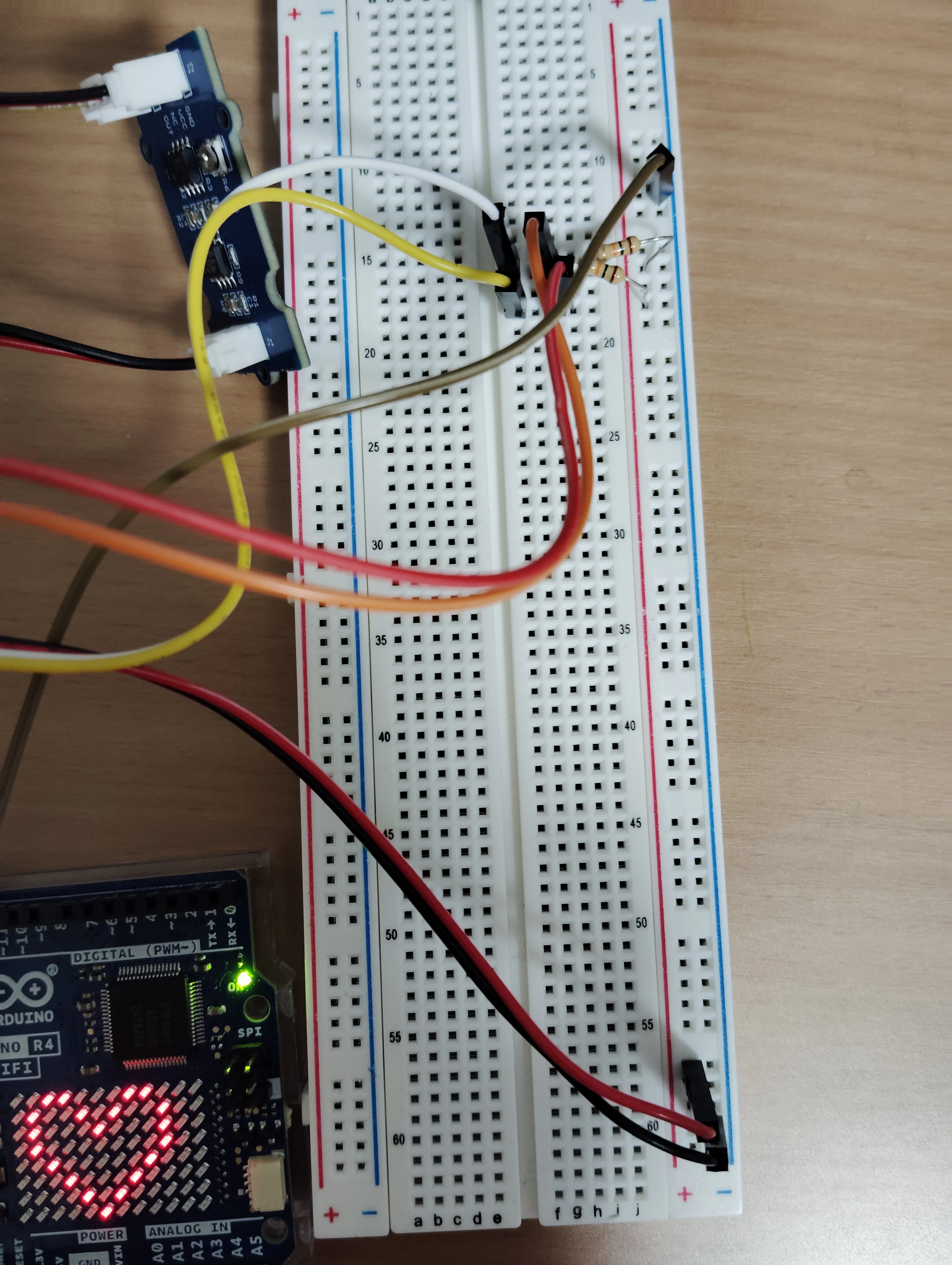
分かりにくいけど、2つのボードのGNDをブレットボードの右のマイナスのラインに接続
SeeeduinoのVCCをブレットボードのプラスに接続
2つのボードのSDAとSCLを同じ列(ブレットボードの数字が同じ)に配置して、その列からプラスへ10Kオームの抵抗を配置(プルアップ抵抗)して、スイッチOFF時などの入力端子の電位を「High(高レベル)」に固定する
SeeeduinoとBase ShieldのVCCのスライドスイッチ設定はともに3.3Vにしておく。
接続が終わったら、両方のボードをスレーブ→マスターの順に電源入れる。
今回は9V1AでセンタープラスのACアダプタを2つ用意した。
SeeeduinoからのI2Cを受けて、無事DangerのLEDが点灯した。
困ったこと2 i2cが途中で止まる。
i2cの通信ができるようになってすぐにハマったのが、「HELP ME!」と送るとスレーブ側のシリアルが「H」だけしか出ない。さらにマスタ、スレーブともにハングする。
Geminiを使って原因を探っていくと、割り込みハンドラ内でSerial.printlnをしていたのが原因だった。
なので、割り込み内の処理をフラグだけにして、loop()側にSerial.printlnを持っていくと、意図通り動いた。
割り込み内では重たい処理はだめ。