使用したUnityのバージョン: 2019.2.10f1
(2026/04/26追記)
本記事内容(+その他先行記事)をブラッシュアップして穿孔多面体(ドーナツ)を横から切っても破綻しないものを作ってくれた方を見つけたので共有
(2021/04/03追記 ) 汚い部分を修正したバージョンを上げました
できたもの
MeshCutの実装をしました!
— 名大3Dサークル(VRもやってます) (@NU_3D_) December 1, 2020
3万頂点ある楕円体もOculusQuestでサクサク切れます(高速化を頑張りました)(須)#VR #MeshCut pic.twitter.com/WUTsG3J6Xw
無印のOculusQuestで大体3万頂点・6万ポリゴンなら大きな遅延はなく切れています.
また, 断面の形が中央から広がっているようなものであれば複数の断面があってもきれいに切れます(ドーナツを縦から切ることはできて横から切ると変になるという感じです)
はじめに
1000行を超えるコードを書くのは初めてなので, 何か間違いやまずいところがございましたら優しく指摘してもらえるとありがたいです.
目次
概要
MeshCutは3Dモデル(つまりMesh)を切断する関数です.
MeshCutの基本的な概要については以下の記事を見てください. (自分もこれを参考にして書きました. お二方に感謝...!)
[Unity] Mesh Cutのサンプルを読む(メッシュの切断)
[Unity] Oculus Goで3Dモデルの切断・メッシュカット(Mesh cut)改良版
簡単にまとめると, Meshを構成する各三角ポリゴンについて, 3つの頂点すべてが切断面に対して片側に寄っていた場合はそのまま振り分け, ポリゴンが切断面を跨いでいた場合には切断してから振り分けを行っています.
今回は元の記事を参考にしつつ, ハイポリなモデルでも速度を出せるように重い処理を改善し, それでいてなるべく高機能になるようにMeshCutを実装しました.
高速化での変更点
高速化を行う際に上で紹介した記事からの変更点をまとめていきます
Mesh.verticesを何度も呼ばない
これは必須です. むしろこれだけやっとけば後は誤差です.
なぜMesh.verticesが重いのかというと、プロパティ内での処理が関係しています.
Meshクラスを見ても定義だけで中身を見ることはできませんが, 各定義のコメントまでは見られるので見てみましょう.
//...省略
//
// 概要:
// Returns a copy of the vertex positions or assigns a new vertex positions array.
public Vector3[] vertices { get; set; }
//省略...
コピーを返すって書いてありますね. なのでこれを何回も呼ぶとそのたびに新しい配列が作られることになるので非常に遅くなります. 一番最初に配列に格納して, 後は配列から呼ぶようにすると良いでしょう.
Vector3[] _targetVertices = _targetMesh.vertices;
Vector3[] _targetNormals = _targetMesh.normals;
Vector3[] _targetUVs = _targetMesh.uv;
//あとは配列から呼び出す
平面に対する頂点の位置情報は先に計算しておく
Meshデータでは, 1つの頂点に対して複数のポリゴンがついているのが普通だと思われます. なので頂点が平面のどちら側にあるのかの計算をポリゴンごとにやってしまうと同じ計算を何度もすることになって無駄が生じます.
先に頂点についての計算結果をboolの配列(表側か否か)に格納しておいて, ポリゴンごとの処理では配列から取り出して使うことで計算の無駄を省きます.
また, 頂点座標や法線などもここで入れてしまうことで頂点が重複してMeshに登録されないようにします.
//各頂点が切断面の表側にあるか裏側にあるか判断.
bool[] _isfront=new bool[_targetVertices.Length];
for (int i = 0; i < _targetVertices.Length; i++)
{
Vector3 pos = _targetVertices[i];
//planeの表側にあるか裏側にあるかを判定.(たぶん表だったらtrue)
if (_isFront[i] = (pnx * (pos.x - ancx) + pny * (pos.y - ancy) + pnz * (pos.z - ancz)) > 0)
{
//頂点の情報もここで入力してしまう
frontVertices_array[frontCount] = pos;
frontNormals_array[frontCount] = _targetNormals[i];
frontUVs_array[frontCount] = _targetUVs[i];
//もとのMeshのn番目の頂点が新しいMeshで何番目になるのかを記録
_trackedArray[i] = frontCount++;
}
else
{
backVertices_array[backCount] = pos;
backNormals_array[backCount] = _targetNormals[i];
backUVs_array[backCount] = _targetUVs[i];
_trackedArray[i] = backCount++;
}
}
//次に, 三角ポリゴンの情報を追加していく
int submeshCount = _targetMesh.subMeshCount;
for (int sub = 0; sub < submeshCount; sub++)
{
int[] indices = _targetMesh.GetIndices(sub);
//ここは後で説明. ポリゴンを形成する頂点の番号を入れるintの配列を作っている.(submeshごとに追加)
int indicesLength = indices.Length;
_frontSubmeshIndices.AddOnlyCount();
_frontSubmeshIndices.Top = _frontSubmeshIndices.Top?.Clear(indicesLength) ?? new UnsafeList<int>(indicesLength);
_backSubmeshIndices.AddOnlyCount();
_backSubmeshIndices.Top = _backSubmeshIndices.Top?.Clear(indicesLength) ?? new UnsafeList<int>(indicesLength);
//リストから配列を引き出す//ここもあとで説明
UnsafeList<int> frontIndices = _frontSubmeshIndices[sub];
int[] frontIndices_array = frontIndices.unsafe_array;
int frontIndicesCount = 0;
UnsafeList<int> backIndices = _backSubmeshIndices[sub];
int[] backIndices_array = backIndices.unsafe_array;
int backIndicesCount = 0;
//ポリゴンの情報は頂点3つで1セットなので3つ飛ばしでループ
for (int i = 0; i < indices.Length; i += 3)
{
int p1, p2, p3;
p1 = indices[i];
p2 = indices[i + 1];
p3 = indices[i + 2];
//予め計算しておいた結果を持ってくる(ここで計算すると同じ頂点にたいして何回も同じ計算をすることになるから最初にまとめてやっている(そのほうが処理時間が速かった))
bool side1 = _isFront[p1];
bool side2 = _isFront[p2];
bool side3 = _isFront[p3];
if (side1 && side2 && side3)//3つとも表側, 3つとも裏側のときはそのまま出力
{
//indicesは切断前のMeshの頂点番号が入っているので_trackedArrayを通すことで新しいMeshでの番号に変えている
frontIndices_array[frontIndicesCount++] = _trackedArray[p1];
frontIndices_array[frontIndicesCount++] = _trackedArray[p2];
frontIndices_array[frontIndicesCount++] = _trackedArray[p3];
}
else if (!side1 && !side2 && !side3)
{
backIndices_array[backIndicesCount++] = _trackedArray[p1];
backIndices_array[backIndicesCount++] = _trackedArray[p2];
backIndices_array[backIndicesCount++] = _trackedArray[p3];
}
else //三角ポリゴンを形成する各点で面に対する表裏が異なる場合, つまり切断面と重なっている平面は分割する.
{
Sepalate(new bool[3] { side1, side2, side3 }, new int[3] { p1, p2, p3 }, sub);
}
}
//最後にUnsafeListのカウントを進めておく//ここも後で説明
frontIndices.unsafe_count = frontIndicesCount;
backIndices.unsafe_count = backIndicesCount;
}
配列・クラスは使い回す
これはGC対策です.
ハイポリのオブジェクトを切る際に新しい配列を毎回生成しているとGarbage Collectionで無視できないレベルで遅延が発生します.
どうしても使い回せないところ(Mesh.verticesなど)はしょうがないですが, 上で紹介した_isFrontなどは要素数が頂点数より大きい分には問題ないので使いわますようにしましょう(上のコードでは見やすいように頭で配列を宣言していますが, 本当はフィールドにstaticで宣言してあります.)
Listではなくて配列で回す
これはもしかしたら怒られそうな気がするので最後に書いています.
Listの中身は配列なので(https://ufcpp.net/study/dotnet/bcl_collection_algorithm.html), 中身の配列に直接書き込めたら高速化するはずです.
そこで中身の配列とカウントを取り出せるUnsafeListクラスをつくり, 高速化しました.(定義は一番下に載せています)
上のコードで出てくるunsafe_arrayやunsafe_countはListの配列とCountにアクセスしていることになります.
ただ保守性や可読性は下がっているので, それが嫌な人は自分でListに書き換えてもらえばと思います.
(2021/04/03追記 ) unsafeListを使わないバージョンも上げておきました
切断の実装
切断したポリゴンの取り扱いは全体的に変更したので, 上に載せたコードの最後にある関数Sepalate()以降での実装を説明していきます.
ポリゴンの分割
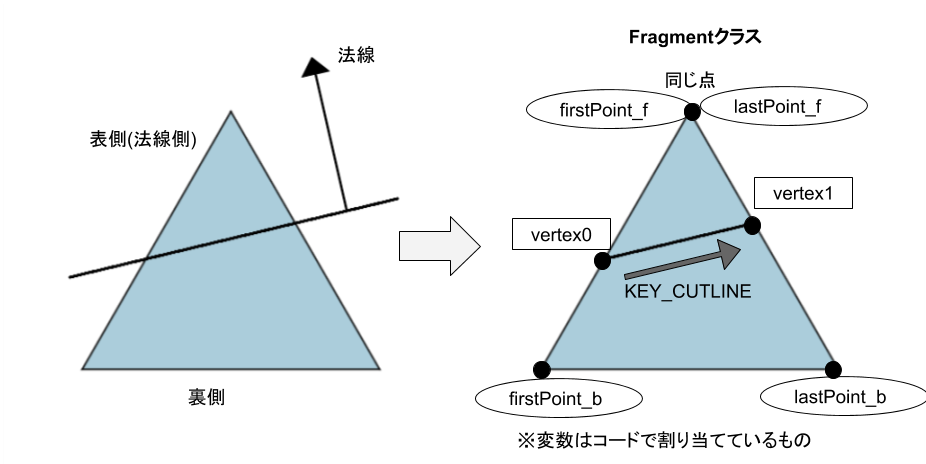
切断面を跨ぐポリゴンの情報はSepalate内でFragmentクラスのインスタンスに格納します. このとき3つの頂点がどの順番で入ってきても上の画像のように変数を当てていきます(こうすることで面の表裏を後から計算しなくてよくなる).
同一平面上にあるポリゴンの結合
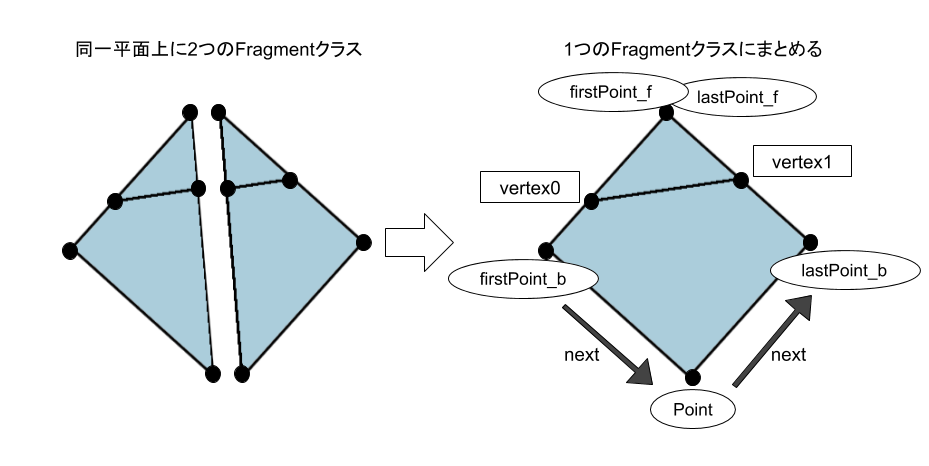
同一平面上にあるポリゴンはまとめてしまって頂点数の増加を防ぎます.
具体的にはポリゴンの分割にあるKEY_CUTLINE(切断辺のVector3から丸め誤差を落としてintに変えたもの)を用いて同一平面上にある可能性があるFragmentをまとめます.
まとめられたFragmentの中から辺を共有しているものを見つけ, 結合しています.
if (fragment.vertex0.KEY_VERTEX == compareFragment.vertex1.KEY_VERTEX)
//fragmentがcompareFragmentに右側からくっつく場合
{
//処理
}
else if (fragment.vertex1.KEY_VERTEX == compareFragment.vertex0.KEY_VERTEX)
//左側からくっつく場合
{
//処理
}
コード中のKEY_VERTEXは, 切断によって新しくできた頂点がどの点とどの点の間にあるのかという情報を持っています.
また切断辺以外の頂点の情報はPointクラスというLinkedListのようなクラスでつながっていて, 一番左にあるのがfirstPoint, firstPoint.nextには次の頂点, 更にnextのnext...とたどっていくと最後はlastPointにつながっています.
結合の際にはPointクラスのつなぎ合わせも行っています.
//Pointクラスのつなぎ合わせ.
//firstPoint.nextがnullということは頂点を1つしか持っていない.
//またその頂点はleftのlastPointとかぶっているので頂点が増えることはない
//(そのときleft.lastPoint_fとright.lastPoint_fは同じ点を示すが別のインスタンスなのでnextがnullのときに入れ替えるとループが途切れてしまう(left.firstPointからlastPointまで辿れなくなってしまう), ので入れ替えない)
if ((left.lastPoint_f.next = right.firstPoint_f.next) != null)
{
left.lastPoint_f = right.lastPoint_f;
left.count_f += right.count_f - 1;
}
if ((left.lastPoint_b.next = right.firstPoint_b.next) != null)
{
left.lastPoint_b = right.lastPoint_b;
left.count_b += right.count_b - 1;
}
切断面のループ作成
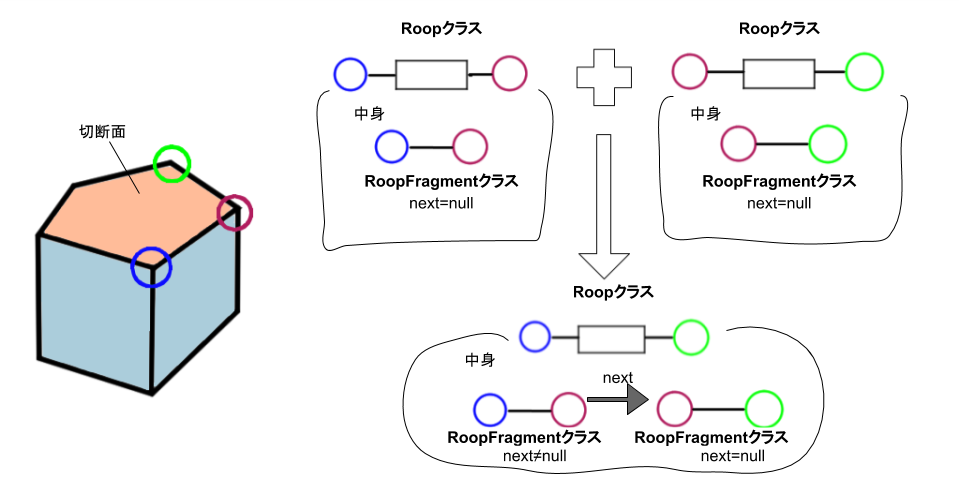
最後に切断面の形成方法です.
結合されたFragmentから切断で新規生成された頂点情報を取り出してRoopFragmentインスタンスを作ります(実際にはインスタンスを作る前にすでにあるものと結合できるか確認して, 結合できなければインスタンス作成).
さらにRoopFragmentインスタンスをRoopインスタンスに格納し, ループの断片ができます.
あとはRoop同士で始端(左手側), 終端(右手側)の頂点座標を比較して同じなら1つのRoopにまとめます.
こうしていくことで最終的に切断面1つにつきRoopインスタンスは1つしか残らなくなり, 切断面ごとに別々のループを作ることができます.
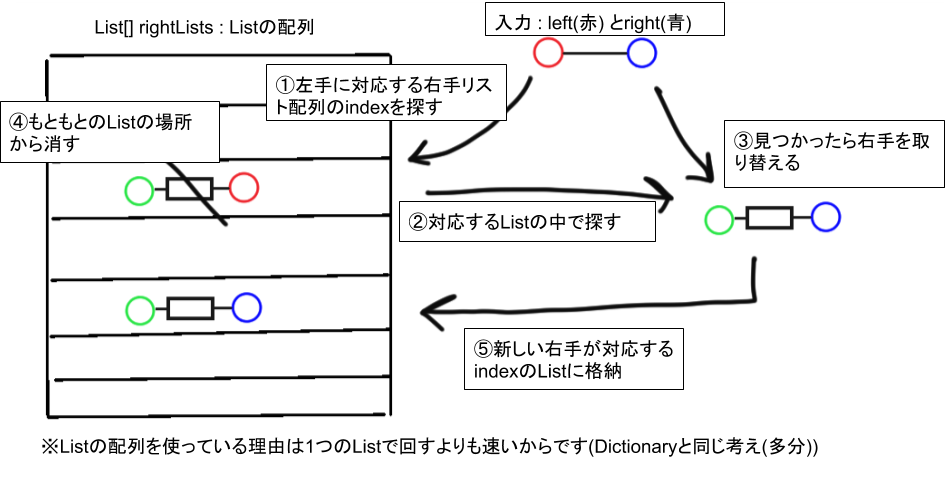
ただこの実装が面倒で, 具体的には左手リスト配列と右手リスト配列を作って1つのRoopインスタンスをその両方に入れています.
そして他のRoopと結合する際にはそのたびに格納される場所を振り替えることで実装しています.
const int listSize = 31;
//左手リスト配列(同じvector3なら同じListに入る)
List<RooP>[] leftLists = new List<RooP>[listSize];
//右手リスト配列
List<RooP>[] rightLists = new List<RooP>[listSize];
新しい切断辺の情報(Vector3が2つ:leftとright)が入力されると, まずそのVector3に対応する場所を探します.
このとき, 入力されたleftとrightに対応するのは他のRoopクラスのそれぞれ右手と左手なので, leftのVector3で右手リスト配列を探してrightでは逆を行います.
int KEY_LEFT = MakeIntFromVector3(left); //Vector3からintへ
int leftIndex = KEY_LEFT % listSize;//自分の左手の座標が格納されているindex
//自分の左手とくっつくのは相手の右手なので右手Listの中から自分の左手indexの場所を探す
var rList = rightLists[leftIndex];
RooP roop1 = null;
bool find1 = false;
int rcount = rList.Count;
//Listの中身で一致するものがないか確認していく
for (int i = 0; i < rcount; i++)
{
RooP temp = rList[i];
if (temp.endPos == left)
{
//roopの右手をtargetの右手に変える(roopは左端と右端の情報だけを持っている)
temp.end.next = target;
temp.end = target;
temp.endPos = right;
roop1 = temp;
//roopをリストから外す(あとで新しい右手indexの場所に移す)
rList.RemoveAt(i);
find1 = true;
break;
}
}
rightでも同じことをして, 最後に新しいindexのListにRoopを移し替えて一回のサイクルは終了です. これを切断辺が追加されるごとに実行します.
ただ, leftとrightの両方が結合した場合はすでに登録されている2つのRoopが1つにまとまるのでまとめて片方を消します.
if (find1)
{
if (find2)//2つのroopがくっついたとき
{
//roop2(rightがくっついた方)の情報をroop1(leftがくっついた方)に移す
roop1.end = roop2.end;
roop1.endPos = roop2.endPos;
roop1.count += roop2.count + 1;
roop1.center += roop2.center + right;
//roop2の右手リストの場所にroop1を入れる.こうするとroop2は右手も左手もリストから消える
int key = MakeIntFromVector3(roop2.endPos) % listSize;
for (int i = 0; i < rightLists[key].Count; i++)
{
if (roop2 == rightLists[key][i])
{
rightLists[key][i] = roop1;
}
}
}
else//自分の左手とroopの右手がくっついたとき, 右手リストの自分の右手indexにroopをついか
{
roop1.count++;
roop1.center += right;
rightLists[rightIndex].Add(roop1);
}
}
else
{
if (find2)
{
roop2.count++;
roop2.center += right;
leftLists[leftIndex].Add(roop2);
}
else//どこにもくっつかなかったとき, roopを作成, 追加
{
RooP newRoop = new RooP(target, target, left, right, right);
rightLists[rightIndex].Add(newRoop);
leftLists[leftIndex].Add(newRoop);
}
}
最後に
改めてMeshSlicerの凄さを思い知りました... (MeshSlicerのリンクはこちら)
コード中にコメントを書いた後で大幅な変更を何度もしたのでよくわからないコメント等あったら申し訳ないです
コード全文
using System;
using System.Collections.Generic;
using UnityEngine;
public class MeshCut : MonoBehaviour
{
static Mesh _targetMesh;
static Vector3[] _targetVertices;
static Vector3[] _targetNormals;
static Vector2[] _targetUVs; //この3つはめっちゃ大事でこれ書かないと10倍くらい重くなる(for文中で使うから参照渡しだとやばい)
//平面の方程式はn・r=h(nは法線,rは位置ベクトル,hはconst(=_planeValue))
static Vector3 _planeNormal;
static float _planeValue;
static UnsafeList<bool> _isFront_List = new UnsafeList<bool>(SIZE);
static UnsafeList<int> _trackedArray_List = new UnsafeList<int>(SIZE);
static bool[] _isFront;//頂点が切断面に対して表にあるか裏にあるか
static int[] _trackedArray;//切断後のMeshでの切断前の頂点の番号
static bool _makeCutSurface;
static Dictionary<int, (int, int)> newVertexDic = new Dictionary<int, (int, int)>(101);
static FragmentList fragmentList = new FragmentList();
static RoopFragmentCollection roopCollection = new RoopFragmentCollection();
//UnsafeListはListの中身の配列を引きずり出して直接書き換えるために自作したクラス. 高速だけど安全性が低い
const int SIZE = 200;
static UnsafeList<Vector3> _frontVertices = new UnsafeList<Vector3>(SIZE);//想定されるモデルの頂点数分の領域を予め空けておく
static UnsafeList<Vector3> _backVertices = new UnsafeList<Vector3>(SIZE);
static UnsafeList<Vector3> _frontNormals = new UnsafeList<Vector3>(SIZE);
static UnsafeList<Vector3> _backNormals = new UnsafeList<Vector3>(SIZE);
static UnsafeList<Vector2> _frontUVs = new UnsafeList<Vector2>(SIZE);
static UnsafeList<Vector2> _backUVs = new UnsafeList<Vector2>(SIZE);
static UnsafeList<UnsafeList<int>> _frontSubmeshIndices = new UnsafeList<UnsafeList<int>>(SIZE * 3);
static UnsafeList<UnsafeList<int>> _backSubmeshIndices = new UnsafeList<UnsafeList<int>>(SIZE * 3);
/// <summary>
/// <para>gameObjectを切断して2つのMeshにして返します.1つ目のMeshが切断面の法線に対して表側, 2つ目が裏側です.</para>
/// <para>何度も切るようなオブジェクトでも頂点数が増えないように処理をしてあるほか, 簡単な物体なら切断面を縫い合わせることもできます</para>
/// </summary>
/// <param name="targetMesh">切断するMesh</param>
/// <param name="targetTransform">切断するMeshのTransform</param>
/// <param name="planeAnchorPoint">切断面上のワールド空間上での1点</param>
/// <param name="planeNormalDirection">切断面のワールド空間上での法線</param>
/// <param name="makeCutSurface">切断後にMeshを縫い合わせるか否か</param>
/// <param name="addNewMeshIndices">新しいsubMeshを作るか(切断面に新しいマテリアルを割り当てる場合にはtrue, すでに切断面のマテリアルがRendererについてる場合はfalse)</param>
/// <returns></returns>
public static (Mesh frontside, Mesh backside) CutMesh(Mesh targetMesh, Transform targetTransform, Vector3 planeAnchorPoint, Vector3 planeNormalDirection, bool makeCutSurface = true, bool addNewMeshIndices = false)
{
if (planeNormalDirection == Vector3.zero)
{
Debug.LogError("the normal vector magnitude is zero!");
Mesh empty = new Mesh();
empty.vertices = new Vector3[] { };
return (null, null);
}
//初期化
{
_targetMesh = targetMesh; //Mesh情報取得
//for文で_targetMeshから呼ぶのは非常に重くなるのでここで配列に格納してfor文ではここから渡す(Mesh.verticesなどは参照ではなくて毎回コピーしたものを返してるっぽい)
_targetVertices = _targetMesh.vertices;
_targetNormals = _targetMesh.normals;
_targetUVs = _targetMesh.uv;
int verticesLength = _targetVertices.Length;
_makeCutSurface = makeCutSurface;
_trackedArray_List.Clear(verticesLength);//Listのサイズを確保_trackedArray_Listはここで配列のサイズを整えるためだけに使用
_trackedArray = _trackedArray_List.unsafe_array;//中身の配列を割り当て
_isFront_List.Clear(verticesLength);
_isFront = _isFront_List.unsafe_array;
newVertexDic.Clear();
roopCollection.Clear();
fragmentList.Clear();
_frontVertices.Clear(verticesLength); //List.Clear()とほぼ同じ挙動
_frontNormals.Clear(verticesLength);
_frontUVs.Clear(verticesLength);
_frontSubmeshIndices.Clear(2);
_backVertices.Clear(verticesLength);
_backNormals.Clear(verticesLength);
_backUVs.Clear(verticesLength);
_backSubmeshIndices.Clear(2);
Vector3 scale = targetTransform.localScale;//localscaleに合わせてPlaneに入れるnormalに補正をかける
_planeNormal = Vector3.Scale(scale, targetTransform.transform.InverseTransformDirection(planeNormalDirection)).normalized;
}
//最初に頂点の情報だけを入力していく
Vector3 anchor = targetTransform.transform.InverseTransformPoint(planeAnchorPoint);
_planeValue = Vector3.Dot(_planeNormal, anchor);
{
//UnsafeListから中身の配列を取り出す(配列の要素数はverticesLengthなので要素数を超えたアクセスは発生しない)
//List.Addよりもちょっと早い
Vector3[] frontVertices_array = _frontVertices.unsafe_array;
Vector3[] backVertices_array = _backVertices.unsafe_array;
Vector3[] frontNormals_array = _frontNormals.unsafe_array;
Vector3[] backNormals_array = _backNormals.unsafe_array;
Vector2[] frontUVs_array = _frontUVs.unsafe_array;
Vector2[] backUVs_array = _backUVs.unsafe_array;
float pnx = _planeNormal.x;
float pny = _planeNormal.y;
float pnz = _planeNormal.z;
float ancx = anchor.x;
float ancy = anchor.y;
float ancz = anchor.z;
int frontCount = 0;
int backCount = 0;
for (int i = 0; i < _targetVertices.Length; i++)
{
Vector3 pos = _targetVertices[i];
//planeの表側にあるか裏側にあるかを判定.(たぶん表だったらtrue)
if (_isFront[i] = (pnx * (pos.x - ancx) + pny * (pos.y - ancy) + pnz * (pos.z - ancz)) > 0)
{
//頂点情報を入力
frontVertices_array[frontCount] = pos;
frontNormals_array[frontCount] = _targetNormals[i];
frontUVs_array[frontCount] = _targetUVs[i];
//もとのMeshのn番目の頂点が新しいMeshで何番目になるのかを記録
_trackedArray[i] = frontCount++;
}
else
{
backVertices_array[backCount] = pos;
backNormals_array[backCount] = _targetNormals[i];
backUVs_array[backCount] = _targetUVs[i];
_trackedArray[i] = backCount++;
}
}
//配列に入れた要素数と同じだけcountをすすめる
_frontVertices.unsafe_count = frontCount;
_frontNormals.unsafe_count = frontCount;
_frontUVs.unsafe_count = frontCount;
_backVertices.unsafe_count = backCount;
_backNormals.unsafe_count = backCount;
_backUVs.unsafe_count = backCount;
if (frontCount == 0 || backCount == 0)//片側に全部寄った場合はここで終了
{
return (null, null);
}
}
//次に, 三角ポリゴンの情報を追加していく
int submeshCount = _targetMesh.subMeshCount;
for (int sub = 0; sub < submeshCount; sub++)
{
int[] indices = _targetMesh.GetIndices(sub);
//ポリゴンを形成する頂点の番号を入れるintの配列を作っている.(submeshごとに追加)
int indicesLength = indices.Length;
_frontSubmeshIndices.AddOnlyCount();
_frontSubmeshIndices.Top = _frontSubmeshIndices.Top?.Clear(indicesLength) ?? new UnsafeList<int>(indicesLength);
_backSubmeshIndices.AddOnlyCount();
_backSubmeshIndices.Top = _backSubmeshIndices.Top?.Clear(indicesLength) ?? new UnsafeList<int>(indicesLength);
//リストから配列を引き出す
UnsafeList<int> frontIndices = _frontSubmeshIndices[sub];
int[] frontIndices_array = frontIndices.unsafe_array;
int frontIndicesCount = 0;
UnsafeList<int> backIndices = _backSubmeshIndices[sub];
int[] backIndices_array = backIndices.unsafe_array;
int backIndicesCount = 0;
//ポリゴンの情報は頂点3つで1セットなので3つ飛ばしでループ
for (int i = 0; i < indices.Length; i += 3)
{
int p1, p2, p3;
p1 = indices[i];
p2 = indices[i + 1];
p3 = indices[i + 2];
//予め計算しておいた結果を持ってくる(ここで計算すると同じ頂点にたいして何回も同じ計算をすることになるから最初にまとめてやっている(そのほうが処理時間が速かった))
bool side1 = _isFront[p1];
bool side2 = _isFront[p2];
bool side3 = _isFront[p3];
if (side1 && side2 && side3)//3つとも表側, 3つとも裏側のときはそのまま出力
{
//indicesは切断前のMeshの頂点番号が入っているので_trackedArrayを通すことで新しいMeshでの番号に変えている
frontIndices_array[frontIndicesCount++] = _trackedArray[p1];
frontIndices_array[frontIndicesCount++] = _trackedArray[p2];
frontIndices_array[frontIndicesCount++] = _trackedArray[p3];
}
else if (!side1 && !side2 && !side3)
{
backIndices_array[backIndicesCount++] = _trackedArray[p1];
backIndices_array[backIndicesCount++] = _trackedArray[p2];
backIndices_array[backIndicesCount++] = _trackedArray[p3];
}
else //三角ポリゴンを形成する各点で面に対する表裏が異なる場合, つまり切断面と重なっている平面は分割する.
{
Sepalate(new bool[3] { side1, side2, side3 }, new int[3] { p1, p2, p3 }, sub);
}
}
//最後にUnsafeListのカウントを進めておく
frontIndices.unsafe_count = frontIndicesCount;
backIndices.unsafe_count = backIndicesCount;
}
fragmentList.MakeTriangle();//切断されたポリゴンはここでそれぞれのMeshに追加される
if (makeCutSurface)
{
if (addNewMeshIndices)
{
_frontSubmeshIndices.Add(new UnsafeList<int>(20));//submeshが増えるのでリスト追加
_backSubmeshIndices.Add(new UnsafeList<int>(20));
}
roopCollection.MakeCutSurface(_frontSubmeshIndices.Count - 1,targetTransform);
}
//2つのMeshを新規に作ってそれぞれに情報を追加して出力
Mesh frontMesh = new Mesh();
frontMesh.name = "Split Mesh front";
//unity2019.4以降ならこっちを使うだけで2割程度速くなる(unity2019.2以前は対応していない.2019.3は知らない)
//int fcount = _frontVertices.unsafe_count;//unity2019.4以降
//frontMesh.SetVertices(_frontVertices.unsafe_array, 0, fcount);//unity2019.4以降
//frontMesh.SetNormals(_frontNormals.unsafe_array, 0, fcount);//unity2019.4以降
//frontMesh.SetUVs(0, _frontUVs.unsafe_array, 0, fcount);//unity2019.4以降
frontMesh.vertices = _frontVertices.ToArray();//unity2019.2以前
frontMesh.normals = _frontNormals.ToArray();//unity2019.2以前
frontMesh.uv = _frontUVs.ToArray();//unity2019.2以前
frontMesh.subMeshCount = _frontSubmeshIndices.Count;
for (int i = 0; i < _frontSubmeshIndices.Count; i++)
{
frontMesh.SetIndices(_frontSubmeshIndices[i].ToArray(), MeshTopology.Triangles, i, false);//unity2019.2以前
//frontMesh.SetIndices(_frontSubmeshIndices[i].unsafe_array, 0, _frontSubmeshIndices[i].unsafe_count, MeshTopology.Triangles, i, false);//unity2019.4以降
}
Mesh backMesh = new Mesh();
backMesh.name = "Split Mesh back";
//int bcount = _backVertices.unsafe_count;//unity2019.4以降
//backMesh.SetVertices(_backVertices.unsafe_array, 0, bcount);//unity2019.4以降
//backMesh.SetNormals(_backNormals.unsafe_array, 0, bcount);//unity2019.4以降
//backMesh.SetUVs(0, _backUVs.unsafe_array, 0, bcount);//unity2019.4以降
backMesh.vertices = _backVertices.ToArray();//unity2019.2以前
backMesh.normals = _backNormals.ToArray();//unity2019.2以前
backMesh.uv = _backUVs.ToArray();//unity2019.2以前
backMesh.subMeshCount = _backSubmeshIndices.Count;
for (int i = 0; i < _backSubmeshIndices.Count; i++)
{
backMesh.SetIndices(_backSubmeshIndices[i].ToArray(), MeshTopology.Triangles, i, false);//unity2019.2以前
//backMesh.SetIndices(_backSubmeshIndices[i].unsafe_array, 0, _backSubmeshIndices[i].unsafe_count, MeshTopology.Triangles, i, false);//unity2019.4以降
}
return (frontMesh, backMesh);
}
/// <summary>
/// Meshを切断します.
/// 1つ目のGameObjectが法線の向いている方向で新しくInstantiateしたもの, 1つ目のGameObjectが法線と反対方向で入力したものを返します
/// </summary>
/// <param name="targetGameObject">切断されるGameObject</param>
/// <param name="planeAnchorPoint">切断平面上のどこか1点(ワールド座標)</param>
/// <param name="planeNormalDirection">切断平面の法線(ワールド座標)</param>
/// <param name="makeCutSurface">切断面を作るかどうか</param>
/// <param name="cutSurfaceMaterial">切断面に割り当てるマテリアル(nullの場合は適当なマテリアルを割り当てる)</param>
/// <returns></returns>
public static (GameObject copy_normalside, GameObject original_anitiNormalside) CutMesh(GameObject targetGameObject, Vector3 planeAnchorPoint, Vector3 planeNormalDirection, bool makeCutSurface = true, Material cutSurfaceMaterial = null)
{
if (!targetGameObject.GetComponent<MeshFilter>())
{
Debug.LogError("引数のオブジェクトにはMeshFilterをアタッチしろ!");
return (null, null);
}
else if (!targetGameObject.GetComponent<MeshRenderer>())
{
Debug.LogError("引数のオブジェクトにはMeshrendererをアタッチしろ!");
return (null, null);
}
Mesh mesh = targetGameObject.GetComponent<MeshFilter>().mesh;
Transform transform = targetGameObject.transform;
bool addNewMaterial;
MeshRenderer renderer = targetGameObject.GetComponent<MeshRenderer>();
//materialにアクセスするとその瞬間にmaterialの個別のインスタンスが作られてマテリアル名に(instance)がついてしまうので読み込みはsharedMaterialで行う
Material[] mats = renderer.sharedMaterials;
if (makeCutSurface && cutSurfaceMaterial != null)
{
if (mats[mats.Length - 1]?.name == cutSurfaceMaterial.name)//すでに切断マテリアルが追加されているときはそれを使うので追加しない
{
addNewMaterial = false;
}
else
{
addNewMaterial = true;
}
}
else
{
addNewMaterial = false;
}
(Mesh fragMesh, Mesh originMesh) = CutMesh(mesh, transform, planeAnchorPoint, planeNormalDirection, makeCutSurface, addNewMaterial);
if (originMesh == null || fragMesh == null)
{
return (null, null);
}
if (addNewMaterial)
{
int matLength = mats.Length;
Material[] newMats = new Material[matLength + 1];
mats.CopyTo(newMats, 0);
newMats[matLength] = cutSurfaceMaterial;
renderer.sharedMaterials = newMats;
}
targetGameObject.GetComponent<MeshFilter>().mesh = originMesh;
//GameObject fragment = new GameObject("Fragment", typeof(MeshFilter), typeof(MeshRenderer));
Transform originTransform = targetGameObject.transform;
GameObject fragment = Instantiate(targetGameObject, originTransform.position, originTransform.rotation, originTransform.parent);
fragment.transform.parent = null;
fragment.GetComponent<MeshFilter>().mesh = fragMesh;
fragment.GetComponent<MeshRenderer>().sharedMaterials = targetGameObject.GetComponent<MeshRenderer>().sharedMaterials;
if (targetGameObject.GetComponent<MeshCollider>())
{
//頂点が1点に重なっている場合にはエラーが出るので, 直したい場合はmesh.RecalculateBoundsのあとでmesh.bounds.size.magnitude<0.00001などで条件分けして対処してください
targetGameObject.GetComponent<MeshCollider>().sharedMesh = originMesh;
fragment.GetComponent<MeshCollider>().sharedMesh = fragMesh;
}
return (fragment, targetGameObject);
}
//ポリゴンを切断
//ポリゴンは切断面の表側と裏側に分割される.
//このとき三角ポリゴンを表面から見て, なおかつ切断面の表側にある頂点が下に来るように見て,
//三角形の左側の辺を形成する点をf0,b0, 右側にある辺を作る点をf1,b1とする.(fは表側にある点でbは裏側)(頂点は3つなので被りが存在する)
//ここでポリゴンの向きを決めておくと後々とても便利
//以降左側にあるものは0,右側にあるものは1をつけて扱う(例外はあるかも)
//(ひょっとすると実際の向きは逆かもしれないけどvertexIndicesと同じまわり方で出力してるので逆でも問題はない.ここでは3点が時計回りで並んでいると仮定して全部の)
private static void Sepalate(bool[] sides, int[] vertexIndices, int submesh)
{
int f0 = 0, f1 = 0, b0 = 0, b1 = 0; //頂点のindex番号を格納するのに使用
bool twoPointsInFrontSide;//どちらがに頂点が2つあるか
//ポリゴンの向きを揃える
if (sides[0])
{
if (sides[1])
{
f0 = vertexIndices[1];
f1 = vertexIndices[0];
b0 = b1 = vertexIndices[2];
twoPointsInFrontSide = true;
}
else
{
if (sides[2])
{
f0 = vertexIndices[0];
f1 = vertexIndices[2];
b0 = b1 = vertexIndices[1];
twoPointsInFrontSide = true;
}
else
{
f0 = f1 = vertexIndices[0];
b0 = vertexIndices[1];
b1 = vertexIndices[2];
twoPointsInFrontSide = false;
}
}
}
else
{
if (sides[1])
{
if (sides[2])
{
f0 = vertexIndices[2];
f1 = vertexIndices[1];
b0 = b1 = vertexIndices[0];
twoPointsInFrontSide = true;
}
else
{
f0 = f1 = vertexIndices[1];
b0 = vertexIndices[2];
b1 = vertexIndices[0];
twoPointsInFrontSide = false;
}
}
else
{
f0 = f1 = vertexIndices[2];
b0 = vertexIndices[0];
b1 = vertexIndices[1];
twoPointsInFrontSide = false;
}
}
//切断前のポリゴンの頂点の座標を取得(そのうち2つはかぶってる)
Vector3 frontPoint0, frontPoint1, backPoint0, backPoint1;
if (twoPointsInFrontSide)
{
frontPoint0 = _targetVertices[f0];
frontPoint1 = _targetVertices[f1];
backPoint0 = backPoint1 = _targetVertices[b0];
}
else
{
frontPoint0 = frontPoint1 = _targetVertices[f0];
backPoint0 = _targetVertices[b0];
backPoint1 = _targetVertices[b1];
}
//ベクトル[backPoint0 - frontPoint0]を何倍したら切断平面に到達するかは以下の式で表される
//平面の式: dot(r,n)=A ,Aは定数,nは法線,
//今回 r =frontPoint0+k*(backPoint0 - frontPoint0), (0 ≦ k ≦ 1)
//これは, 新しくできる頂点が2つの頂点を何対何に内分してできるのかを意味している
float dividingParameter0 = (_planeValue - Vector3.Dot(_planeNormal, frontPoint0)) / (Vector3.Dot(_planeNormal, backPoint0 - frontPoint0));
//Lerpで切断によってうまれる新しい頂点の座標を生成
Vector3 newVertexPos0 = Vector3.Lerp(frontPoint0, backPoint0, dividingParameter0);
float dividingParameter1 = (_planeValue - Vector3.Dot(_planeNormal, frontPoint1)) / (Vector3.Dot(_planeNormal, backPoint1 - frontPoint1));
Vector3 newVertexPos1 = Vector3.Lerp(frontPoint1, backPoint1, dividingParameter1);
//新しい頂点の生成, ここではNormalとUVは計算せず後から計算できるように頂点のindex(_trackedArray[f0], _trackedArray[b0],)と内分点の情報(dividingParameter0)を持っておく
NewVertex vertex0 = fragmentList.MakeVertex(_trackedArray[f0], _trackedArray[b0], dividingParameter0, newVertexPos0);
NewVertex vertex1 = fragmentList.MakeVertex(_trackedArray[f1], _trackedArray[b1], dividingParameter1, newVertexPos1);
//切断でできる辺(これが同じポリゴンは結合することで頂点数の増加を抑えられる)
Vector3 cutLine = (newVertexPos1 - newVertexPos0).normalized;
int KEY_CUTLINE = MakeIntFromVector3_ErrorCut(cutLine);//Vector3だと処理が重そうなのでintにしておく, ついでに丸め誤差を切り落とす
//切断情報を含んだFragmentクラス
Fragment fragment = fragmentList.MakeFragment(vertex0, vertex1, twoPointsInFrontSide, KEY_CUTLINE, submesh);
//Listに追加してListの中で同一平面のFragmentは結合とかする
fragmentList.Add(fragment, KEY_CUTLINE, submesh);
}
class RoopFragment
{
public RoopFragment next; //右隣のやつ
public Vector3 rightPosition;//右側の座標(左側の座標は左隣のやつがもってる)
public RoopFragment(Vector3 _rightPosition)
{
next = null;
rightPosition = _rightPosition;
}
public RoopFragment SetNew(Vector3 _rightPosition)
{
next = null;
rightPosition = _rightPosition;
return this;
}
}
class RooP
{
public RoopFragment start, end; //startが左端, endが右端
//public int KEY_LEFT, KEY_RIGHT;
public Vector3 startPos, endPos;
public int count;
public Vector3 center;
public RooP(RoopFragment _left, RoopFragment _right, Vector3 _startPos, Vector3 _endPos, Vector3 rightPos)
{
start = _left;
end = _right;
startPos = _startPos;
endPos = _endPos;
count = 1;
center = rightPos;
}
}
public class RoopFragmentCollection
{
const int listSize = 31;
List<RooP>[] leftLists = new List<RooP>[listSize];//左手リスト配列(同じvector3なら同じListに入る)
List<RooP>[] rightLists = new List<RooP>[listSize];//右手リスト配列
UnsafeList<RoopFragment> roopFragments = new UnsafeList<RoopFragment>(100);
public RoopFragmentCollection()
{
for (int i = 0; i < listSize; i++)
{
leftLists[i] = new List<RooP>(5);
rightLists[i] = new List<RooP>(5);
}
}
public void Add(Vector3 left, Vector3 right)
{
int KEY_LEFT = MakeIntFromVector3(left); //Vector3からintへ
int KEY_RIGHT = MakeIntFromVector3(right);
RoopFragment target;
roopFragments.AddOnlyCount();
roopFragments.Top = roopFragments.Top?.SetNew(right) ?? new RoopFragment(right);
target = roopFragments.Top;
//Dictionaryとにた処理
int leftIndex = KEY_LEFT % listSize;//自分の左手の座標が格納されているindex
int rightIndex = KEY_RIGHT % listSize;//右手
//自分の左手とくっつくのは相手の右手なので右手Listの中から自分の左手indexの場所を探す
var rList = rightLists[leftIndex];
RooP roop1 = null;
bool find1 = false;
int rcount = rList.Count;
for (int i = 0; i < rcount; i++)
{
RooP temp = rList[i];
if (temp.endPos == left)
{
//roopの右手をtargetの右手に変える(roopは左端と右端の情報だけを持っている)
temp.end.next = target;
temp.end = target;
temp.endPos = right;
roop1 = temp;
//roopをリストから外す(あとで右手Listの自分の右手indexの場所に移すため)
rList.RemoveAt(i);
find1 = true;
break;
}
}
var lList = leftLists[rightIndex];
RooP roop2 = null;
bool find2 = false;
int lcount = lList.Count;
for (int j = 0; j < lcount; j++)
{
roop2 = lList[j];
if (right == roop2.startPos)
{
if (roop1 == roop2)
{
//print("make roop");
roop1.count++;
roop1.center += right;
return;
}//roop1==roop2のとき, roopが完成したのでreturn
target.next = roop2.start;
roop2.start = target;
roop2.startPos = left;
lList.RemoveAt(j);
find2 = true;
break;
}
}
if (find1)
{
if (find2)//2つのroopがくっついたとき
{
roop1.end = roop2.end;
roop1.endPos = roop2.endPos;
roop1.count += roop2.count + 1;
roop1.center += roop2.center + right;
int key = MakeIntFromVector3(roop2.endPos) % listSize;
for (int i = 0; i < rightLists[key].Count; i++)
{
if (roop2 == rightLists[key][i])
{
rightLists[key][i] = roop1;
}
}
}
else//自分の左手とroopの右手がくっついたとき, 右手リストの自分の右手indexにroopをついか
{
roop1.count++;
roop1.center += right;
rightLists[rightIndex].Add(roop1);
}
}
else
{
if (find2)
{
roop2.count++;
roop2.center += right;
leftLists[leftIndex].Add(roop2);
}
else//どこにもくっつかなかったとき, roopを作成, 追加
{
RooP newRoop = new RooP(target, target, left, right, right);
rightLists[rightIndex].Add(newRoop);
leftLists[leftIndex].Add(newRoop);
}
}
}
public void MakeCutSurface(int submesh, Transform targetTransform)
{
Vector3 scale = targetTransform.localScale;
Vector3 world_Up = Vector3.Scale(scale, targetTransform.InverseTransformDirection(Vector3.up)).normalized;//ワールド座標の上方向をオブジェクト座標に変換
Vector3 world_Right = Vector3.Scale(scale, targetTransform.InverseTransformDirection(Vector3.right)).normalized;//ワールド座標の右方向をオブジェクト座標に変換
Vector3 uVector, vVector; //オブジェクト空間上でのUVのU軸,V軸
uVector = Vector3.Cross(world_Up, _planeNormal); //U軸は切断面の法線とY軸との外積
uVector = (uVector.sqrMagnitude != 0) ? uVector.normalized : world_Right; //切断面の法線がZ軸方向のときはuVectorがゼロベクトルになるので場合分け
vVector = Vector3.Cross(_planeNormal, uVector).normalized; //V軸はU軸と切断平面のノーマルとの外積
if (Vector3.Dot(vVector, world_Up) < 0) { vVector *= -1; } //v軸の方向をワールド座標上方向に揃える.
float u_min, u_max, u_range;
float v_min, v_max, v_range;
foreach (List<RooP> list in leftLists)
{
foreach (RooP roop in list)
{
{
u_min = u_max = Vector3.Dot(uVector, roop.startPos);
v_min = v_max = Vector3.Dot(vVector, roop.startPos);
RoopFragment fragment = roop.start;
int count = 0;
do
{
float u_value = Vector3.Dot(uVector, fragment.rightPosition);
u_min = Mathf.Min(u_min, u_value);
u_max = Mathf.Max(u_max, u_value);
float v_value = Vector3.Dot(vVector, fragment.rightPosition);
v_min = Mathf.Min(v_min, v_value);
v_max = Mathf.Max(v_max, v_value);
if (count > 1000) //何かあったときのための安全装置(while文こわい)
{
Debug.LogError("Something is wrong?");
break;
}
count++;
}
while ((fragment = fragment.next) != null);
u_range = u_max - u_min;
v_range = v_max - v_min;
}
//roopFragmentのnextをたどっていくことでroopを一周できる
MakeVertex(roop.center / roop.count, out int center_f, out int center_b);
RoopFragment nowFragment = roop.start;
MakeVertex(nowFragment.rightPosition, out int first_f, out int first_b);
int previous_f = first_f;
int previous_b = first_b;
while (nowFragment.next != null)
{
nowFragment = nowFragment.next;
MakeVertex(nowFragment.rightPosition, out int index_f, out int index_b);
_frontSubmeshIndices[submesh].Add(center_f);
_frontSubmeshIndices[submesh].Add(index_f);
_frontSubmeshIndices[submesh].Add(previous_f);
_backSubmeshIndices[submesh].Add(center_b);
_backSubmeshIndices[submesh].Add(previous_b);
_backSubmeshIndices[submesh].Add(index_b);
previous_f = index_f;
previous_b = index_b;
}
_frontSubmeshIndices[submesh].Add(center_f);
_frontSubmeshIndices[submesh].Add(first_f);
_frontSubmeshIndices[submesh].Add(previous_f);
_backSubmeshIndices[submesh].Add(center_b);
_backSubmeshIndices[submesh].Add(previous_b);
_backSubmeshIndices[submesh].Add(first_b);
}
}
void MakeVertex(Vector3 vertexPos, out int findex, out int bindex)
{
findex = _frontVertices.Count;
bindex = _backVertices.Count;
Vector2 uv;
{ //positionをUVに変換
float uValue = Vector3.Dot(uVector, vertexPos);
float normalizedU = (uValue - u_min) / u_range;
float vValue = Vector3.Dot(vVector, vertexPos);
float normalizedV = (vValue - v_min) / v_range;
uv = new Vector2(normalizedU, normalizedV);
}
_frontVertices.Add(vertexPos);
_frontNormals.Add(-_planeNormal);
_frontUVs.Add(uv);
_backVertices.Add(vertexPos);
_backNormals.Add(_planeNormal);
_backUVs.Add(new Vector2(1 - uv.x, uv.y));//UVを左右反転する
}
}
public void Clear()
{
for (int i = 0; i < listSize; i++)
{
leftLists[i].Clear();
rightLists[i].Clear();
}
}
}
public class Fragment
{
public NewVertex vertex0, vertex1;
public int KEY_CUTLINE;
public int submesh;//submesh番号(どのマテリアルを当てるか)
public Point firstPoint_f, lastPoint_f, firstPoint_b, lastPoint_b;
public int count_f, count_b;
public Fragment(NewVertex _vertex0, NewVertex _vertex1, bool _twoPointsInFrontSide, int _KEY_CUTLINE, int _submesh)
{
SetNew(_vertex0, _vertex1, _twoPointsInFrontSide, _KEY_CUTLINE, _submesh);
}
public Fragment SetNew(NewVertex _vertex0, NewVertex _vertex1, bool _twoPointsInFrontSide, int _KEY_CUTLINE, int _submesh)
{
vertex0 = _vertex0;
vertex1 = _vertex1;
KEY_CUTLINE = _KEY_CUTLINE;
submesh = _submesh;
if (_twoPointsInFrontSide)
{
firstPoint_f = fragmentList.MakePoint(_vertex0.frontsideindex_of_frontMesh);
lastPoint_f = fragmentList.MakePoint(_vertex1.frontsideindex_of_frontMesh);
firstPoint_f.next = lastPoint_f;
firstPoint_b = fragmentList.MakePoint(vertex0.backsideindex_of_backMash);
lastPoint_b = firstPoint_b;
count_f = 2;
count_b = 1;
}
else
{
firstPoint_f = fragmentList.MakePoint(_vertex0.frontsideindex_of_frontMesh);
lastPoint_f = firstPoint_f;
firstPoint_b = fragmentList.MakePoint(vertex0.backsideindex_of_backMash);
lastPoint_b = fragmentList.MakePoint(vertex1.backsideindex_of_backMash);
firstPoint_b.next = lastPoint_b;
count_f = 1;
count_b = 2;
}
return this;
}
public void AddTriangle()
{
(int findex0, int bindex0) = vertex0.GetIndex(); //Vertexの中で新しく生成された頂点を登録してその番号だけを返している
(int findex1, int bindex1) = vertex1.GetIndex();
Point point = firstPoint_f;
int preIndex = point.index;
int count = count_f;
int halfcount = count_f / 2;
for (int i = 0; i < halfcount; i++)
{
point = point.next;
int index = point.index;
_frontSubmeshIndices[submesh].Add(index);
_frontSubmeshIndices[submesh].Add(preIndex);
_frontSubmeshIndices[submesh].Add(findex0);
preIndex = index;
}
_frontSubmeshIndices[submesh].Add(preIndex);
_frontSubmeshIndices[submesh].Add(findex0);
_frontSubmeshIndices[submesh].Add(findex1);
int elseCount = count_f - halfcount - 1;
for (int i = 0; i < elseCount; i++)
{
point = point.next;
int index = point.index;
_frontSubmeshIndices[submesh].Add(index);
_frontSubmeshIndices[submesh].Add(preIndex);
_frontSubmeshIndices[submesh].Add(findex1);
preIndex = index;
}
point = firstPoint_b;
preIndex = point.index;
count = count_b;
halfcount = count_b / 2;
for (int i = 0; i < halfcount; i++)
{
point = point.next;
int index = point.index;
_backSubmeshIndices[submesh].Add(index);
_backSubmeshIndices[submesh].Add(bindex0);
_backSubmeshIndices[submesh].Add(preIndex);
preIndex = index;
}
_backSubmeshIndices[submesh].Add(preIndex);
_backSubmeshIndices[submesh].Add(bindex1);
_backSubmeshIndices[submesh].Add(bindex0);
elseCount = count_b - halfcount - 1;
for (int i = 0; i < elseCount; i++)
{
point = point.next;
int index = point.index;
_backSubmeshIndices[submesh].Add(index);
_backSubmeshIndices[submesh].Add(bindex1);
_backSubmeshIndices[submesh].Add(preIndex);
preIndex = index;
}
if (_makeCutSurface)
{
roopCollection.Add(vertex0.position, vertex1.position);//切断平面を形成する準備
}
}
}
//新しい頂点のNormalとUVは最後に生成するので, もともとある頂点をどの比で混ぜるかをdividingParameterが持っている
public class NewVertex
{
public int frontsideindex_of_frontMesh; //frontVertices,frontNormals,frontUVsでの頂点の番号(frontsideindex_of_frontMeshとbacksideindex_of_backMashでできる辺の間に新しい頂点ができる)
public int backsideindex_of_backMash;
public float dividingParameter;//新しい頂点の(frontsideindex_of_frontMeshとbacksideindex_of_backMashでできる辺に対する)内分点
public int KEY_VERTEX;
public Vector3 position;
public NewVertex(int front, int back, float parameter, Vector3 vertexPosition)
{
frontsideindex_of_frontMesh = front;
backsideindex_of_backMash = back;
KEY_VERTEX = (front << 16) | back;
dividingParameter = parameter;
position = vertexPosition;
}
public NewVertex SetNew(int front, int back, float parameter, Vector3 vertexPosition)
{
frontsideindex_of_frontMesh = front;
backsideindex_of_backMash = back;
KEY_VERTEX = (front << 16) | back;
dividingParameter = parameter;
position = vertexPosition;
return this;
}
public (int findex, int bindex) GetIndex()
{
//法線とUVの情報はここで生成する
Vector3 frontNormal, backNormal;
Vector2 frontUV, backUV;
frontNormal = _frontNormals[frontsideindex_of_frontMesh];
frontUV = _frontUVs[frontsideindex_of_frontMesh];
backNormal = _backNormals[backsideindex_of_backMash];
backUV = _backUVs[backsideindex_of_backMash];
Vector3 newNormal = Vector3.Lerp(frontNormal, backNormal, dividingParameter);
Vector2 newUV = Vector2.Lerp(frontUV, backUV, dividingParameter);
int findex, bindex;
(int, int) trackNumPair;
//同じ2つの点の間に生成される頂点は1つにまとめたいのでDictionaryを使う
if (newVertexDic.TryGetValue(KEY_VERTEX, out trackNumPair))
{
findex = trackNumPair.Item1;//新しい頂点が表側のMeshで何番目か
bindex = trackNumPair.Item2;
}
else
{
findex = _frontVertices.Count;
_frontVertices.Add(position);
_frontNormals.Add(newNormal);
_frontUVs.Add(newUV);
bindex = _backVertices.Count;
_backVertices.Add(position);
_backNormals.Add(newNormal);
_backUVs.Add(newUV);
newVertexDic.Add(KEY_VERTEX, (findex, bindex));
}
return (findex, bindex);
}
}
public class Point
{
public Point next;
public int index;
public Point(int _index)
{
index = _index;
next = null;
}
public Point SetNew(int _index)
{
index = _index;
next = null;
return this;
}
}
public class FragmentList
{
const int listSize = 71;
List<Fragment>[] fragmentLists = new List<Fragment>[listSize];//複数のListに分散させることで検索速度を上げている(Dictionaryを参考にした)
public FragmentList()
{
for (int i = 0; i < listSize; i++)
{
fragmentLists[i] = new List<Fragment>(10);
}
}
public void Add(Fragment fragment, int KEY_CUTLINE, int submesh)
{
//基本的な仕組みはDictionaryと同じ
int listIndex = KEY_CUTLINE % listSize;
List<Fragment> flist = fragmentLists[listIndex];//同じ切断辺を持つFragmentは同じ場所に格納される(別のFragmentが入っていないわけではない)
bool connect = false;
//格納されているFragmentからくっつけられるやつを探す
for (int i = flist.Count - 1; i >= 0; i--)
{
Fragment compareFragment = flist[i];
if (fragment.KEY_CUTLINE == compareFragment.KEY_CUTLINE)//同じ切断辺をもつか判断
{
Fragment left, right;
if (fragment.vertex0.KEY_VERTEX == compareFragment.vertex1.KEY_VERTEX)//fragmentがcompareFragmentに右側からくっつく場合
{
right = fragment;
left = compareFragment;
}
else if (fragment.vertex1.KEY_VERTEX == compareFragment.vertex0.KEY_VERTEX)//左側からくっつく場合
{
left = fragment;
right = compareFragment;
}
else
{
continue;//どっちでもないときは次のループへ
}
//Pointクラスのつなぎ合わせ.
//firstPoint.nextがnullということは頂点を1つしか持っていない.
//またその頂点はleftのlastPointとかぶっているので頂点が増えることはない
//(left.lastPoint_fとright.lastPoint_fは同じ点を示すが別のインスタンスなのでnextがnullのときに入れ替えるとループが途切れてしまう)
if ((left.lastPoint_f.next = right.firstPoint_f.next) != null)
{
left.lastPoint_f = right.lastPoint_f;
left.count_f += right.count_f - 1;
}
if ((left.lastPoint_b.next = right.firstPoint_b.next) != null)
{
left.lastPoint_b = right.lastPoint_b;
left.count_b += right.count_b - 1;
}
//結合を行う
//Fragmentがより広くなるように頂点情報を変える
left.vertex1 = right.vertex1;
right.vertex0 = left.vertex0;
//connectがtrueになっているということは2つのFragmentのあいだに新しいやつがはまって3つが1つになったということ
//connect==trueのとき, rightもleftもListにすでに登録されてるやつなのでどっちかを消してやる
if (connect)
{
flist.Remove(right);
break;
}
flist[i] = left;
fragment = left;
connect = true;
}
}
if (!connect)
{
flist.Add(fragment);
}
}
public void MakeTriangle()
{
int sum = 0;
foreach (List<Fragment> list in fragmentLists)
{
foreach (Fragment f in list)
{
f.AddTriangle();
sum++;
}
}
}
public void Clear()
{
foreach (List<Fragment> f in fragmentLists)
{
f.Clear();
}
vertexRepository.Clear(200);
fragmentRepository.Clear(100);
}
UnsafeList<NewVertex> vertexRepository = new UnsafeList<NewVertex>(200);
UnsafeList<Fragment> fragmentRepository = new UnsafeList<Fragment>(100);
UnsafeList<Point> pointRepository = new UnsafeList<Point>(400);
public NewVertex MakeVertex(int front, int back, float parameter, Vector3 vertexPosition)
{
vertexRepository.AddOnlyCount();
vertexRepository.Top = vertexRepository.Top?.SetNew(front, back, parameter, vertexPosition) ?? new NewVertex(front, back, parameter, vertexPosition);
return vertexRepository.Top;
}
public Fragment MakeFragment(NewVertex _vertex0, NewVertex _vertex1, bool _twoPointsInFrontSide, int _KEY_CUTLINE, int _submesh)
{
fragmentRepository.AddOnlyCount();
fragmentRepository.Top = fragmentRepository.Top?.SetNew(_vertex0, _vertex1, _twoPointsInFrontSide, _KEY_CUTLINE, _submesh) ?? new Fragment(_vertex0, _vertex1, _twoPointsInFrontSide, _KEY_CUTLINE, _submesh);
return fragmentRepository.Top;
}
public Point MakePoint(int index)
{
pointRepository.AddOnlyCount();
pointRepository.Top = pointRepository.Top?.SetNew(index) ?? new Point(index);
return pointRepository.Top;
}
}
const int filter = 0x000003FF;
const int amp = 1 << 18;
public static int MakeIntFromVector3(Vector3 vec)
{
int cutLineX = ((int)(vec.x * amp) & filter) << 20;
int cutLineY = ((int)(vec.y * amp) & filter) << 10;
int cutLineZ = ((int)(vec.z * amp) & filter);
return cutLineX | cutLineY | cutLineZ;
}
const int amp2 = 1 << 10;//丸め誤差を落とすためにやや低めの倍率がかかっている
public static int MakeIntFromVector3_ErrorCut(Vector3 vec)
{
int cutLineX = ((int)(vec.x * amp2) & filter) << 20;
int cutLineY = ((int)(vec.y * amp2) & filter) << 10;
int cutLineZ = ((int)(vec.z * amp2) & filter);
return cutLineX | cutLineY | cutLineZ;
}
}
UnsafeListクラス
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using System;
public class UnsafeList<T>:IEnumerable<T> //List.Add()が遅いのでListから配列を引きずり出して直接入力するために使用.
{
public T[] unsafe_array;
int capacity;
public int unsafe_count;
public int Count { get { return unsafe_count; } }//unsafe_countと違って安全
public int Capacity { get { return capacity; } }//内部配列の最大収容数(要素数よりも常に多い)
public UnsafeList(int cap)
{
if (cap <= 0) { cap = 1; }
unsafe_array = new T[cap];
capacity = cap;
unsafe_count = 0;
}
public T this[int index]
{
get
{
if (index >= unsafe_count) { Debug.LogError("index is out of range!!"); }
return unsafe_array[index];
}
set
{
if (index >= unsafe_count) { Debug.LogError("index is out of range!!"); }
unsafe_array[index] = value;
}
}
public void Add(T value)
{
if (capacity == unsafe_count)//配列が埋まったら新しい配列に移し替える
{
capacity = (capacity) * 2;
var temp = new T[capacity];
Array.Copy(unsafe_array, temp, unsafe_count);
unsafe_array = temp;
}
unsafe_array[unsafe_count++] = value;
}
public UnsafeList<T> Clear(int _minCapacity=20)//初期化と同時に拡張
{
if (capacity < _minCapacity)
{
var temp = new T[_minCapacity];
unsafe_array = temp;
capacity = _minCapacity;
}
unsafe_count = 0;
return this;
}
public T[] ToArray()
{
var output = new T[unsafe_count];
Array.Copy(unsafe_array, output, unsafe_count);
return output;
}
public List<T> ToList()
{
var output = new T[unsafe_count];
Array.Copy(unsafe_array, output, unsafe_count);
return new List<T>(output);
}
public void AddOnlyCount()//カウントだけ増やして以前に使っていたものがそのまま入ってる状態にする(クラスの使いまわしに利用)
{
if (capacity == unsafe_count)
{
capacity = (capacity) * 2;
var temp = new T[capacity];
Array.Copy(unsafe_array, temp, unsafe_count);
unsafe_array = temp;
}
unsafe_count++;
}
public T Top //listの先頭を返す
{
get
{
return unsafe_array[unsafe_count - 1];
}
set
{
unsafe_array[unsafe_count - 1] = value;
}
}
//ここから下はforeachで回せるようにIEnumerableの実装をしている
public IEnumerator<T> GetEnumerator() { return new UnsafeListEnumerator(unsafe_array, unsafe_count); }
IEnumerator IEnumerable.GetEnumerator() { return this.GetEnumerator(); }
class UnsafeListEnumerator:IEnumerator<T>
{
int index;
int arrayLength;
T[] array;
public T Current { get { return array[index]; } }
object IEnumerator.Current { get { return array[index]; } }
public UnsafeListEnumerator(T[] array,int arrayLength)
{
index = -1;
this.arrayLength = arrayLength;
this.array = array;
}
public bool MoveNext()
{
if (++index >= arrayLength)
{
return false;
}
return true;
}
public void Reset()
{
index = -1;
}
void IDisposable.Dispose() { }
}
}
確認用シェーダー
面がどう貼られているかの確認に便利です
Shader "Custom/LineShader"
{
Properties
{
_Color("Color", Color) = (1,1,1,1)
_Thickness("Thickness",Range(0.01,1)) = 0.5
_RightAngle("RightAngleOnly",Range(0,1)) = 1
}
SubShader
{
Tags {
"RenderType" = "Opaque" }
LOD 200
CGINCLUDE
#pragma vertex vert
#pragma fragment frag
#pragma geometry geom
#include "UnityCG.cginc"
fixed4 _Color;
float _Thickness,_RightAngle;
struct appdata
{
float4 vertex: POSITION;
float3 normal :NORMAL;
};
struct v2g
{
//float4 pos: SV_POSITION;
float4 vertex:TEXCOORD0;
float3 normal :NORMAL;
};
struct g2f
{
float4 pos :SV_POSITION;
float3 normal :NORMAL;
};
v2g vert(appdata v)
{
v2g o;
//o.pos = UnityObjectToClipPos(v.vertex);
o.vertex = v.vertex;
o.normal = v.normal;
return o;
}
//[maxvertexcount()]は最大出力数今回は一度のループで15個まで頂点を出力できるようにした
[maxvertexcount(18)]
void geom(triangle v2g input[3], uint pid : SV_PrimitiveID, inout TriangleStream<g2f> outStream) //TriangleStreamは出力されるオブジェクトの形. 他には、PointStream型、LineStream型がある
{
float3 op[6];
float3 normals[6];
for (int i = 0; i < 3; i++) {
op[i] = input[i].vertex.xyz;
normals[i] = input[i].normal;
}
float weight = 1 / _Thickness;
for (int i = 0; i < 3; i++) {
op[i + 3] = op[i] * weight + op[(i + 1) % 3] + op[(i + 2) % 3];
op[i + 3] /= weight + 2;
op[i + 3] = op[i] * weight + op[(i + 1) % 3] + op[(i + 2) % 3];
op[i + 3] /= weight + 2;
normals[i + 3] = normals[i] * weight + normals[(i + 1) % 3] + normals[(i + 2) % 3];
normals[i + 3] /= weight + 2;
normals[i + 3] = normals[i] * weight + normals[(i + 1) % 3] + normals[(i + 2) % 3];
normals[i + 3] /= weight + 2;
}
//float3 normal = normalize(cross(op[1] - op[0], op[2] - op[0]));
float3 lines[3];
lines[0] = normalize(op[1] - op[0]);
lines[1] = normalize(op[2] - op[1]);
lines[2] = normalize(op[0] - op[2]);
float rang = _RightAngle;
float3 newOp[6] = op;
float3 newNormals[6] = normals;
for (int i = 0; i < 3; i++) {
float dotvalue = abs(dot(lines[(i + 1) % 3], lines[(i + 2) % 3]));
//float dotvalue = abs(dot(lines[0], lines[2]));
if (rang > dotvalue) {
rang = dotvalue;
newOp[i + 3] = op[i] * (weight + 1) + op[(i + 1) % 3];
newOp[i + 3] /= weight + 2;
newOp[(i + 1) % 3 + 3] = op[i] + op[(i + 1) % 3] * (weight + 1);
newOp[(i + 1) % 3 + 3] /= weight + 2;
newOp[(i + 2) % 3 + 3] = op[(i + 2) % 3 + 3];
newNormals[i + 3] = normals[i] * (weight + 1) + normals[(i + 1) % 3];
newNormals[i + 3] /= weight + 2;
newNormals[(i + 1) % 3 + 3] = normals[i] + normals[(i + 1) % 3] * (weight + 1);
newNormals[(i + 1) % 3 + 3] /= weight + 2;
newNormals[(i + 2) % 3 + 3] = normals[(i + 2) % 3 + 3];
}
}
op = newOp;
normals = newNormals;
g2f o;
o.normal = input[0].normal;
for (int i = 0; i < 3; i++) {
o.pos = UnityObjectToClipPos(float4(op[i], 1));
o.normal = normals[i];
outStream.Append(o);
o.pos = UnityObjectToClipPos(float4(op[(i + 1) % 3], 1));
o.normal = normals[(i + 1) % 3];
outStream.Append(o);
o.pos = UnityObjectToClipPos(float4(op[i + 3], 1));
o.normal = normals[i + 3];
outStream.Append(o);
outStream.RestartStrip();
o.pos = UnityObjectToClipPos(float4(op[i + 3], 1));
outStream.Append(o);
o.pos = UnityObjectToClipPos(float4(op[(i + 1) % 3], 1));
o.normal = normals[(i + 1) % 3];
outStream.Append(o);
o.pos = UnityObjectToClipPos(float4(op[(i + 1) % 3 + 3], 1));
o.normal = normals[(i + 1) % 3 + 3];
outStream.Append(o);
outStream.RestartStrip();
}
}
ENDCG
Pass{
Cull Back
CGPROGRAM
fixed4 frag(g2f i) : COLOR
{
fixed4 col;
col = _Color;
float3 N = normalize(i.normal);
float3 L = normalize( mul(unity_WorldToObject ,-_WorldSpaceLightPos0));
float light = dot(N, -L)*0.5+0.5;
col *= (1, 1, 1, 1)*light;
return col;
}
ENDCG
}
Pass{
Cull Front
CGPROGRAM
fixed4 frag(g2f i) : COLOR
{
fixed4 col;
col = _Color;
float3 N = normalize(i.normal);
float3 L = normalize( mul(unity_WorldToObject ,-_WorldSpaceLightPos0));
float light = dot(N, L)*0.4+0.4;
col *= (1, 1, 1, 1)*light;
return col;
}
ENDCG
}
}
FallBack "Diffuse"
}