環境
この記事は以下の環境で動いています。
| 項目 | 値 |
|---|---|
| CPU | Core i5-8250U |
| Ubuntu | 20.04 |
| ROS | Noetic |
| Gazebo | 11.9.0 |
インストールについてはROS講座02 インストールを参照してください。
またこの記事のプログラムはgithubにアップロードされています。ROS講座11 gitリポジトリを参照してください。
概要
画像処理でマーカー認識をすることが出来ます。これと同じようにライダーでも特定の形を見つけてそれを認識するプログラムを作ってみます。
画像処理でいう「テンプレートマッチング」に似たものを行います。
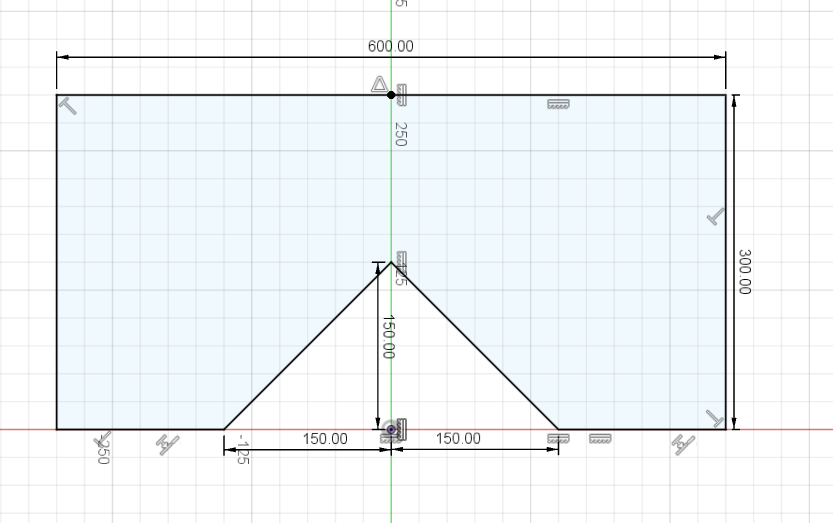
今回以下のような形を認識します。
処理の流れ
laserの点群とマッチするようにテンプレートマッチングさせればよいのですが、(x,y,th)と探索空間がやや多めです。今回は一旦は点群から曲がっている角度に対応する特徴点を抽出して、lidarから見て外側に曲がっている部分を候補としてその周りを重点的に探索します。
ソースコード
# include <bits/stdc++.h>
# include <cmath>
# include <ros/ros.h>
# include <std_msgs/String.h>
# include <sensor_msgs/LaserScan.h>
# include <tf/transform_listener.h>
# include <laser_geometry/laser_geometry.h>
# include <jsk_recognition_msgs/PolygonArray.h>
# include <visualization_msgs/MarkerArray.h>
# include <geometry_msgs/PoseArray.h>
# include <fstream>
# include <string>
# include<algorithm>
struct CurveFeature{
geometry_msgs::Point32 point;
float angle{0.0f};
float sin_value{0.0f};
int reference_index{0};
};
struct SearchItem{
float x;
float y;
float a;
void becomeHalf(void){
x *=0.5;
y *=0.5;
a *=0.5;
}
};
struct DetectedObject{
geometry_msgs::Point32 point;
float angle{0.0f};
int reference_index{0};
DetectedObject add(SearchItem shift){
DetectedObject output;
output.point.x = point.x + shift.x;
output.point.y = point.y + shift.y;
output.point.z = point.z;
output.angle = angle + shift.a;
output.reference_index = reference_index;
return output;
}
};
struct Point2D{
float x{0.0f};
float y{0.0f};
};
struct TempShape{
std::vector<Point2D> points;
std::vector<Point2D> convert(DetectedObject obj){
std::vector<Point2D> output;
for(auto p : points){
Point2D cp;
cp.x = cos(obj.angle) * p.x - sin(obj.angle) * p.y + obj.point.x;
cp.y = sin(obj.angle) * p.x + cos(obj.angle) * p.y + obj.point.y;
output.push_back(cp);
}
return output;
}
};
class LaserGroup{
public:
LaserGroup() : nh_(), pnh_("~") {
laser_sub_ = nh_.subscribe("/front_laser/scan", 10, &LaserGroup::laserCallback, this);
markers_pub_ = nh_.advertise<visualization_msgs::MarkerArray>("marker_array", 1);
pose_array_pub_ = nh_.advertise<geometry_msgs::PoseArray>("detected_poses", 1);
}
void laserCallback (const sensor_msgs::LaserScan::ConstPtr& scan_in){
// convert scan to pointcloud
sensor_msgs::PointCloud cloud;
projector_.projectLaser(*scan_in, cloud);
// extract curve feature
std::vector<CurveFeature> curve_feature = extractFeatureFromPc(cloud, 0.4, 0.6);
// convert to object
std::vector<DetectedObject> detected_objects = extractObjectFromFeatures(curve_feature);
// match to pc
TempShape original_temp = getOriginalTemplate();
std::vector<DetectedObject> matched_objects = matchObject(original_temp, cloud, detected_objects, 0.02);
// output
pose_array_pub_.publish(generatePoses(matched_objects, scan_in->header));
// visualize
visualization_msgs::MarkerArray markers;
for(auto m :generateMarkers(curve_feature)){
markers.markers.push_back(m);
}
for(auto m: generateMarkers(original_temp, detected_objects, "detected_objects")){
markers.markers.push_back(m);
}
for(auto m: generateMarkers(original_temp, matched_objects, "matched_objects")){
markers.markers.push_back(m);
}
markers_pub_.publish(markers);
}
std::vector<CurveFeature> extractFeatureFromPc(sensor_msgs::PointCloud cloud, float jump_threshold, float sin_threshold){
std::vector<CurveFeature> output;
if(cloud.points.size() < 7 ){
return output;
}
for(size_t i = 3; i+3< cloud.points.size(); i++){
// jump detect
auto getDis = [](geometry_msgs::Point32 a, geometry_msgs::Point32 b){
float dx1 = b.x - a.x;
float dy1 = b.y - a.y;
return sqrt(dx1*dx1+dy1*dy1);
};
const float dis1 = getDis(cloud.points[i-1], cloud.points[i+0]);
const float dis2 = getDis(cloud.points[i+0], cloud.points[i+1]);
if(jump_threshold < dis1 || jump_threshold < dis2){
continue;
}
// get angle
float angle_x = (cloud.points[i+2].x + cloud.points[i-2].x)/2 - cloud.points[i+0].x;
float angle_y = (cloud.points[i+2].y + cloud.points[i-2].y)/2 - cloud.points[i+0].y;
float angle = atan2(angle_y, angle_x);
// get feature value
auto getSin = [](geometry_msgs::Point32 a, geometry_msgs::Point32 b, geometry_msgs::Point32 c){
float dx1 = b.x - a.x;
float dy1 = b.y - a.y;
float l1 = sqrt(dx1*dx1+dy1*dy1);
float dx2 = c.x - b.x;
float dy2 = c.y - b.y;
float l2 = sqrt(dx2*dx2+dy2*dy2);
return (dx1*dy2 - dy1*dx2)/(l1*l2);
};
float sinth1 = getSin(cloud.points[i-1], cloud.points[i+0], cloud.points[i+1]);
float sinth2 = getSin(cloud.points[i-2], cloud.points[i+0], cloud.points[i+2]);
float sinth3 = getSin(cloud.points[i-3], cloud.points[i+0], cloud.points[i+3]);
const float sinth_min = std::min(std::min(sinth1, sinth2), sinth3);
const float sinth_max = std::max(std::max(sinth1, sinth2), sinth3);
float sin_value = 0.0f;
if(sinth_min < - sin_threshold && sinth_max < -sin_threshold) sin_value = sinth_max;
if(sin_threshold < sinth_min && sin_threshold < sinth_max) sin_value = sinth_min;
if(sin_value != 0){
CurveFeature feature;
feature.point = cloud.points[i];
feature.angle = angle;
feature.reference_index = i;
feature.sin_value = sin_value;
output.push_back(feature);
}
}
return output;
}
std::vector<DetectedObject> extractObjectFromFeatures(std::vector<CurveFeature> features){
std::vector<DetectedObject> output;
for(auto f : features){
if(0 < f.sin_value){
DetectedObject obj;
obj.point = f.point;
obj.angle = f.angle;
obj.reference_index = f.reference_index;
output.push_back(obj);
}
}
return output;
}
std::vector<DetectedObject> matchObject(TempShape temp, sensor_msgs::PointCloud cloud, std::vector<DetectedObject> input, float threshold){
std::vector<DetectedObject> output;
for(auto in : input){
sensor_msgs::PointCloud pc = extractPointCloud(cloud, in.reference_index, 15);
DetectedObject current_object = in;
std::vector<SearchItem> search_list = {
{0, 0, 0},
{0.02, 0, 0},
{-0.02, 0, 0},
{0, 0.02, 0},
{0, -0.02, 0},
{0, 0, 0.1},
{0, 0, -0.1},
};
float last_score=0.0f;
for(int i=0;i<6;i++){
std::vector<float> scores;
for(auto s: search_list){
DetectedObject candidate = current_object.add(s);
auto t = temp.convert(candidate);
float score = getDifference(t, pc);
scores.push_back(score);
}
std::vector<float>::iterator iter = std::min_element(scores.begin(), scores.end());
size_t index = std::distance(scores.begin(), iter);
// printf("score: [%lu]%f<-%f\n", index, scores[index], scores[0]);
last_score = scores[index];
current_object = current_object.add(search_list[index]);
if(index == 0){
for(auto& item : search_list){
item.becomeHalf();
}
}
}
if(last_score < threshold){
output.push_back(current_object);
}
}
return output;
}
float getDifference(std::vector<Point2D> temp, sensor_msgs::PointCloud pc){
std::vector<float> scores;
for(size_t i = 0; i < temp.size(); i++){
float min_diff = 1000.0f;
for(size_t j = 0; j < pc.points.size(); j++){
float dx = temp[i].x - pc.points[j].x;
float dy = temp[i].y - pc.points[j].y;
float diff = sqrt(dx*dx+dy*dy);
min_diff = std::min(min_diff, diff);
}
scores.push_back(min_diff);
}
float sum = 0.0f;
for(auto s : scores){
sum += s;
}
return sum / scores.size();
}
sensor_msgs::PointCloud extractPointCloud(sensor_msgs::PointCloud pc, int target_index, int side_width){
sensor_msgs::PointCloud output;
output.header = pc.header;
for(size_t i=0; i<pc.points.size();i++){
if(i < target_index - side_width || target_index + side_width < i){
continue;
}
output.points.push_back(pc.points[i]);
}
return output;
}
TempShape getOriginalTemplate(void){
TempShape output;
std::vector<float> x_list = {0.150, 0.150, 0.075, 0, 0.075, 0.150, 0.150};
std::vector<float> y_list = {0.250, 0.150, 0.075, 0, -0.075, -0.150, -0.250};
size_t list_size = std::min(x_list.size(), y_list.size());
for (size_t i=0;i<list_size;i++){
Point2D p;
p.x = x_list[i];
p.y = y_list[i];
output.points.push_back(p);
}
return output;
}
visualization_msgs::Marker generateDeleteMarker(int index){
visualization_msgs::Marker marker;
// marker0
marker.header.frame_id = "laser_link";
marker.header.stamp = ros::Time::now();
marker.ns = "matched";
marker.lifetime = ros::Duration();
marker.id = index;
marker.type = visualization_msgs::Marker::LINE_STRIP;
marker.action = visualization_msgs::Marker::DELETE;
marker.scale.x = 0.02;
marker.pose.orientation.w = 1.0;
return marker;
}
geometry_msgs::PoseArray generatePoses(std::vector<DetectedObject> objects, std_msgs::Header header){
geometry_msgs::PoseArray output;
output.header = header;
for(auto o : objects){
geometry_msgs::Pose pose;
pose.position.x = o.point.x;
pose.position.y = o.point.y;
pose.position.z = o.point.z;
pose.orientation = tf::createQuaternionMsgFromYaw(o.angle);
output.poses.push_back(pose);
}
return output;
}
std::vector<visualization_msgs::Marker> generateMarkers(std::vector<CurveFeature> features){
std::vector<visualization_msgs::Marker> output;
size_t index = 0;
for(auto f: features){
visualization_msgs::Marker marker;
// marker0
marker.header.frame_id = "laser_link";
marker.header.stamp = ros::Time::now();
marker.ns = "curve_feature";
marker.id = index++;
marker.lifetime = ros::Duration(0.2);
marker.type = visualization_msgs::Marker::SPHERE;
marker.action = visualization_msgs::Marker::ADD;
marker.scale.x = 0.15;
marker.scale.y = 0.15;
marker.scale.z = 0.15;
marker.pose.position.x = f.point.x;
marker.pose.position.y = f.point.y;
marker.pose.position.z = f.point.z;
marker.pose.orientation.w = 1.0;
if(0 < f.sin_value){
marker.color.r = 0.0f;
marker.color.g = 1.0f;
marker.color.b = 0.0f;
marker.color.a = 1.0f;
} else {
marker.color.r = 0.0f;
marker.color.g = 0.0f;
marker.color.b = 1.0f;
marker.color.a = 1.0f;
}
output.push_back(marker);
}
return output;
}
std::vector<visualization_msgs::Marker> generateMarkers(TempShape temp, std::vector<DetectedObject> objects, std::string ns){
std::vector<visualization_msgs::Marker> output;
size_t index = 0;
for(auto obj: objects){
visualization_msgs::Marker marker;
// marker0
marker.header.frame_id = "laser_link";
marker.header.stamp = ros::Time::now();
marker.ns = ns;
marker.id = index++;
marker.lifetime = ros::Duration(0.2);
marker.type = visualization_msgs::Marker::LINE_STRIP;
marker.action = visualization_msgs::Marker::ADD;
marker.scale.x = 0.02;
marker.pose.position.x = obj.point.x;
marker.pose.position.y = obj.point.y;
marker.pose.position.z = obj.point.z;
marker.pose.orientation = tf::createQuaternionMsgFromYaw(obj.angle);
marker.points.clear();
for(auto t: temp.points){
geometry_msgs::Point p;
p.x = t.x;
p.y = t.y;
p.z = 0.0;
marker.points.push_back(p);
}
marker.color.r = 0.0f;
marker.color.g = 1.0f;
marker.color.b = 0.0f;
marker.color.a = 1.0f;
output.push_back(marker);
}
return output;
}
ros::NodeHandle nh_;
ros::NodeHandle pnh_;
laser_geometry::LaserProjection projector_;
// tf::TransformListener listener_;
ros::Subscriber laser_sub_;
ros::Publisher markers_pub_;
ros::Publisher pose_array_pub_;
};
int main(int argc, char** argv){
ros::init(argc, argv, "laser_detector");
LaserGroup laser_group;
ros::spin();
return 0;
}
-
extractFeatureFromPc()では点列から曲がっている角度を抽出して一定以上曲がっている特徴点を抽出します。- rvizでは外側/内側に曲がっているかにより緑/青の点が出ます。
- 注目点とその両隣だけを見るとセンサーのノイズに埋もれて正しい角度が分かりません。注目点とその1つ両隣、2つ両隣、3つ両隣の3種類で角度を出してその中で最も浅いものをチェックすることでノイズに埋もれない特徴を取ります。
-
extractObjectFromFeatures()では上記で抽出した特徴点から候補に変換します。 -
matchObject()では候補点ごとにテンプレートと点群を比較して微調整をします。また上記の特徴点ではただの凹みも抽出してしまうので、ここでテンプレートと形が合わないところを除きます。
ビルド
cd ~/catkin_ws
catkin_build
実行
各ターミナルごとに実行前にsource ~/catkin_ws/devel/setup.bashを実行する必要があります。
roslaunch laser_lecture detect_marker.launch
検出されたマーカーは赤の矢印で表示されます。レーザーマーカーの2つの位置が正しく検出されています。
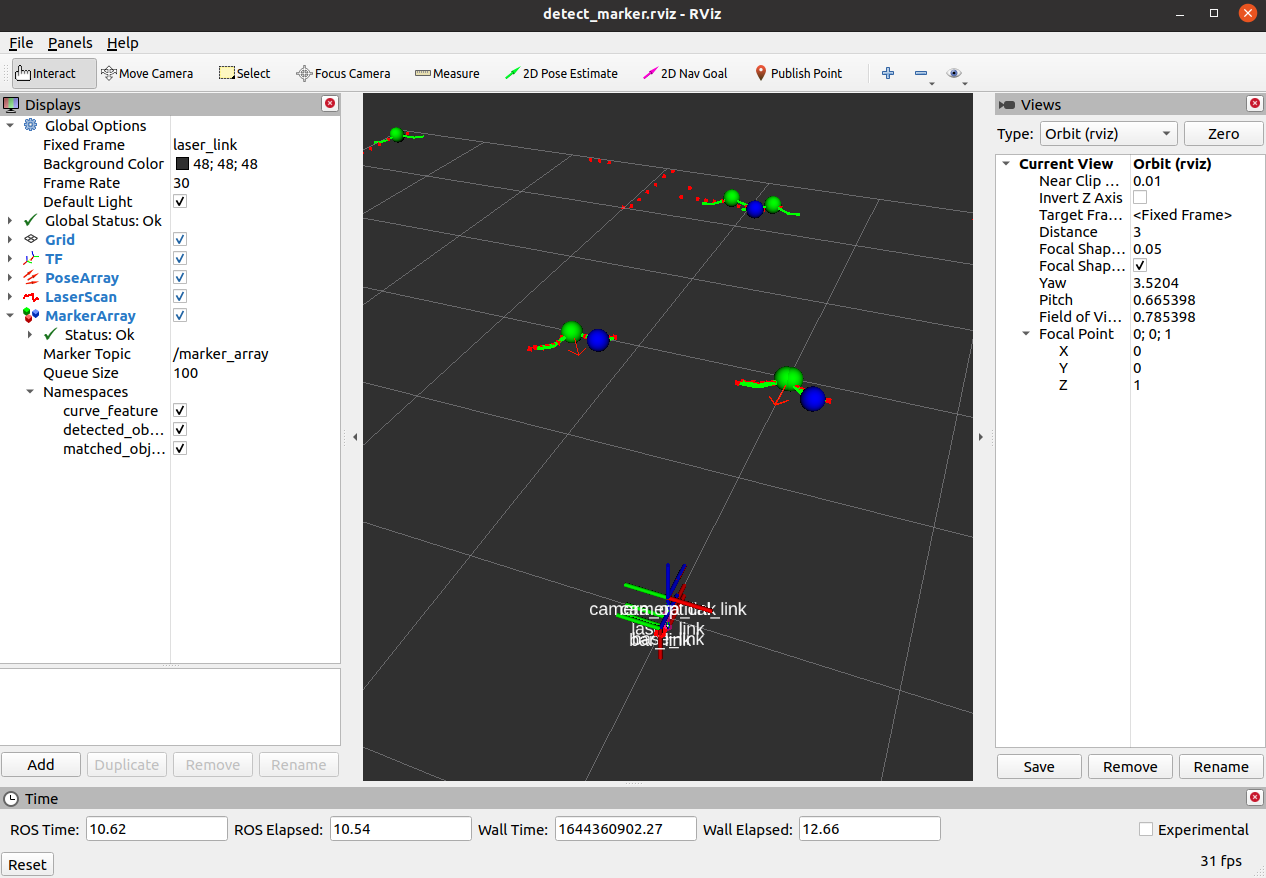
表示の詳細
MarkerArrayのNamespaceごとに各ステップでの検出結果が見えます。
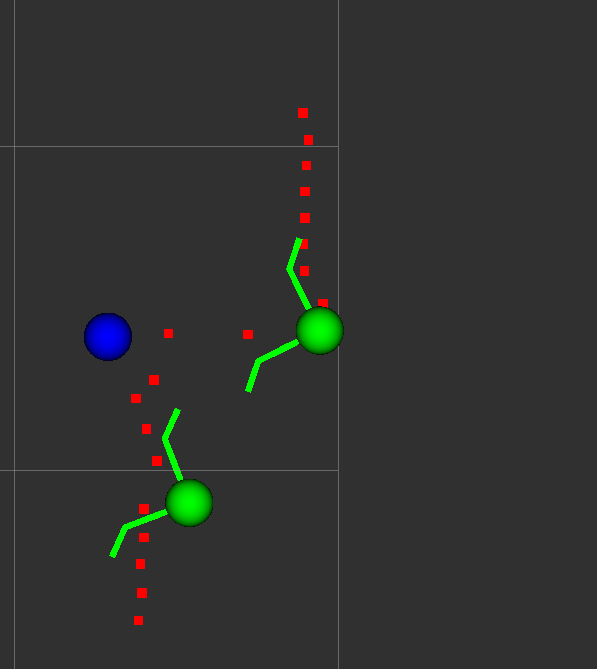
↓laserのデータから特徴量を抽出した結果が「curve_feature」です。センサーから見て凹み部分が緑で、凸部分が青です。
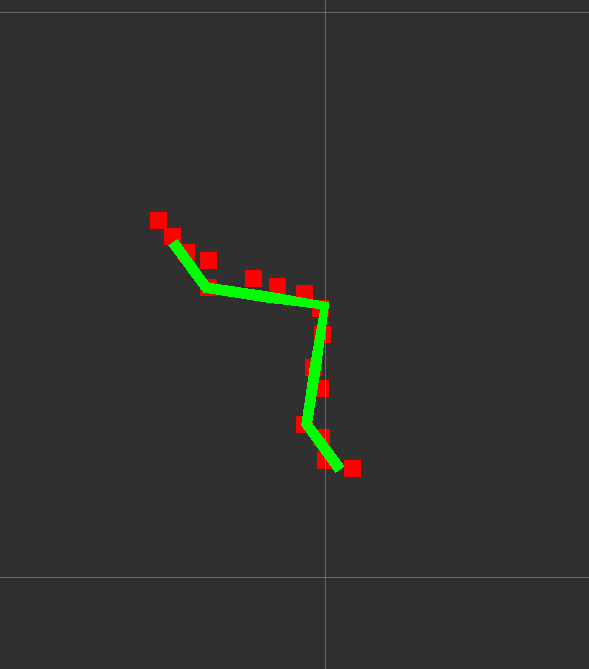
↓検出した凹み特徴からテンプレートの候補が「detected_objects」です。この時点でそこそこ当たってはいますが、わずかにずれがあります。
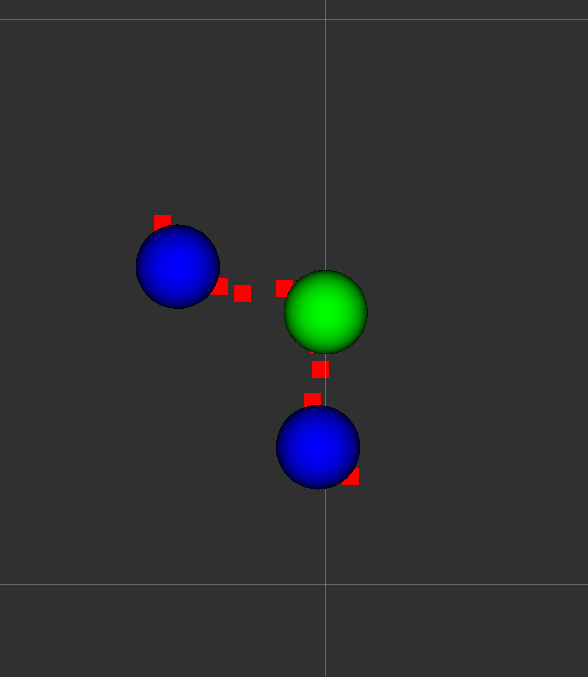
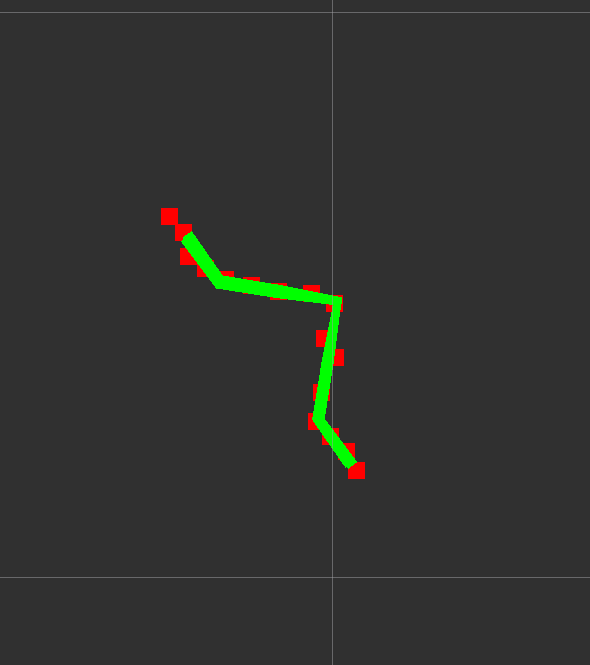
↓候補のテンプレートとlaserのデータをマッチングした結果が「matched_ojects」です。ピッタリ合っているのが見えます。
↓ただの凹みは「detected_object」までは出力されますが、「matched_ojects」を生成する過程でエラー量で棄却されて出力されません。