環境
この記事は以下の環境で動いています。
| 項目 | 値 |
|---|---|
| CPU | Core i5-8250U |
| Ubuntu | 20.04 |
| ROS | Noetic |
| Gazebo | 11.9.0 |
インストールについてはROS講座02 インストールを参照してください。
またこの記事のプログラムはgithubにアップロードされています。ROS講座11 gitリポジトリを参照してください。
概要
前回でオムニホイールとモーターのセットを作ることができました。今回はこれを3つ使って全方向移動台車を製作します。またros_controlをつかって軸を回してみます。
ソースコード
前回でオムニホイールとモーターのxacroを作ったのでそれを利用します。
urdf
モーター+オムニホイールのセットを3セット使って全方向移動台車を作ります。またボディーとして直方体の物体を入れます。
sim2_lecture/xacro/odm_try_wheel1.xacro
<?xml version="1.0"?>
<robot name="odm_robot" xmlns:xacro="http://ros.org/wiki/xacro">
<xacro:include filename="$(find sim2_lecture)/xacro/odm_common.xacro"/>
<xacro:include filename="$(find sim2_lecture)/xacro/odm_omni_wheel_set1.xacro"/>
<link name="base_link"/>
<joint name="body_joint" type="fixed">
<parent link="base_link"/>
<child link="body_link"/>
<origin xyz="0 0 0.05" rpy="0 0 0"/>
</joint>
<link name="body_link">
<visual>
<geometry>
<box size="0.14 0.08 0.02" />
</geometry>
<material name="gray"/>
</visual>
<collision>
<geometry>
<box size="0.14 0.08 0.02" />
</geometry>
</collision>
<inertial>
<mass value="2.0"/>
<inertia ixx="0.01" ixy="0" ixz="0" iyy="0.01" iyz="0" izz="0.01"/>
</inertial>
</link>
<joint name="wheel0_attach_joint" type="fixed">
<parent link="base_link"/>
<child link="wheel0_attach_link"/>
<origin xyz="${0.07*cos(radians(60))} ${0.07*sin(radians(60))} 0.019" rpy="0 0 ${radians(60)}"/>
</joint>
<link name="wheel0_attach_link" />
<xacro:omni_wheel_set prefix="wheel0" parent="wheel0_attach_link" />
<joint name="wheel1_attach_joint" type="fixed">
<parent link="base_link"/>
<child link="wheel1_attach_link"/>
<origin xyz="${0.07*cos(radians(180))} ${0.07*sin(radians(180))} 0.019" rpy="0 0 ${radians(180)}"/>
</joint>
<link name="wheel1_attach_link" />
<xacro:omni_wheel_set prefix="wheel1" parent="wheel1_attach_link" />
<joint name="wheel2_attach_joint" type="fixed">
<parent link="base_link"/>
<child link="wheel2_attach_link"/>
<origin xyz="${0.07*cos(radians(300))} ${0.07*sin(radians(300))} 0.019" rpy="0 0 ${radians(300)}"/>
</joint>
<link name="wheel2_attach_link" />
<xacro:omni_wheel_set prefix="wheel2" parent="wheel2_attach_link" />
<gazebo>
<plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so">
<robotNamespace>/odm_robot</robotNamespace>
</plugin>
</gazebo>
</robot>
launch
ロボットのgazeboへの出現とros_controlを起動します。
sim2_lecture/launch/odm_gazebo2.launch
<?xml version="1.0" encoding="UTF-8"?>
<launch>
<arg name="model" default="$(find sim2_lecture)/xacro/odm_try_wheel1.xacro" />
<arg name="rvizconfig" default="$(find sim2_lecture)/rviz/odm_display.rviz" />
<param name="robot_description" command="$(find xacro)/xacro $(arg model) --inorder"/>
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="paused" value="false"/>
<arg name="use_sim_time" value="true"/>
<arg name="gui" value="true"/>
<arg name="headless" value="false"/>
<arg name="debug" value="false"/>
</include>
<node name="spawn_urdf" pkg="gazebo_ros" type="spawn_model" args="-param robot_description -urdf -model odm_robot" />
<rosparam command="load" file="$(find sim2_lecture)/config/odm_move_controller.yaml" ns="odm_robot"/>
<rosparam command="load" file="$(find sim2_lecture)/config/odm_joint_state_controller.yaml" ns="odm_robot"/>
<node name="controller_spawner" pkg="controller_manager"
type="spawner" respawn="false"
output="screen" ns="/odm_robot"
args="joint_controller0 joint_controller1 joint_controller2 joint_state_controller"/>
</launch>
ros_control用のパラメーターです。
sim2_lecture/config/odm_move_controller.yaml
joint_controller0:
type: effort_controllers/JointVelocityController
joint: wheel0_motor_shaft_joint
pid: {p: 0.05, i: 0.0, d: 0.0001, i_clamp: 1.0, antiwindup: true}
joint_controller1:
type: effort_controllers/JointVelocityController
joint: wheel1_motor_shaft_joint
pid: {p: 0.05, i: 0.0, d: 0.0001, i_clamp: 1.0, antiwindup: true}
joint_controller2:
type: effort_controllers/JointVelocityController
joint: wheel2_motor_shaft_joint
pid: {p: 0.05, i: 0.0, d: 0.0001, i_clamp: 1.0, antiwindup: true}
実行
gazenoに台車が出現します。各ターミナルごとに実行前にsource ~/catkin_ws/devel/setup.bashを実行する必要があります。
roslaunch sim2_lecture odm_gazebo2.launch
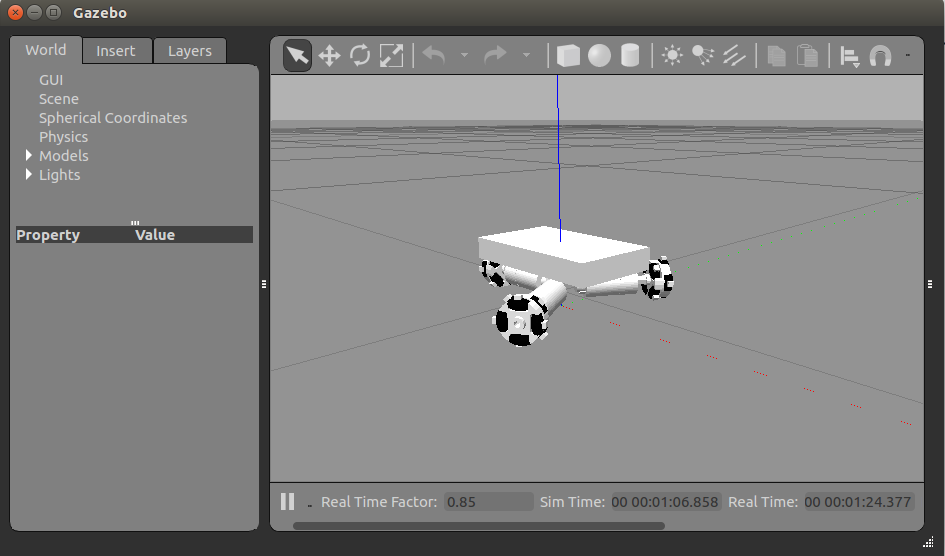
軸を回してみます。
rostopic pub -r 5 /odm_robot/joint_controller0/command std_msgs/Float64 "data: 6.0"
上記の画像のようにオムニホイールの中のバレルが回って、実際のオムニホイールと同様に動いているのが分かります。