環境
この記事は以下の環境で動いています。
| 項目 | 値 |
|---|---|
| CPU | Core i5-8250U |
| Ubuntu | 20.04 |
| ROS | Noetic |
| Gazebo | 11.9.0 |
インストールについてはROS講座02 インストールを参照してください。
またこの記事のプログラムはgithubにアップロードされています。ROS講座11 gitリポジトリを参照してください。
概要
今まで単純な立体で模様の無いgazebo modelを作ってきました。今回はメッシュの使い方、テクスチャの適用の仕方を説明します。
ソースコード
メッシュの使い方(stlファイルを使う)
stl形式のメッシュの形を持ったmodelを製作します。
「mesh_room」という名前のモデルの形をroom_mesh.stlというメッシュで指定します。stlファイルは以下のようにmesh_roomモデルのディレクトリの直下に置きます。
gazebo1_lecture/
├── models/
│ └── mesh_room/
│ ├── model.config
│ ├── model.sdf
│ └── room_mesh.stl
└── worlds/
<?xml version='1.0'?>
<sdf version="1.4">
<model name="mesh_room">
<pose>0 0 0.5 0 0 0</pose>
<link name="link">
<inertial>
<mass>1.0</mass>
<inertia>
<ixx>0.083</ixx>
<ixy>0.0</ixy>
<ixz>0.0</ixz>
<iyy>0.083</iyy>
<iyz>0.0</iyz>
<izz>0.083</izz>
</inertia>
</inertial>
<collision name="collision">
<geometry>
<mesh>
<uri>model://mesh_room/room_mesh.stl</uri>
</mesh>
</geometry>
</collision>
<visual name="visual">
<geometry>
<mesh>
<uri>model://mesh_room/room_mesh.stl</uri>
</mesh>
</geometry>
</visual>
</link>
</model>
</sdf>
このように<geometry>要素の中の<mesh>要素の中の<uri>要素でファイルを指定します。model://(モデル名)/(ファイル名)のように指定します。
collisionとvisualの両方で指定します。
テクスチャを張る
ここまで模様のない単色のモデルのみでしたが、表面に模様のあるテクスチャー付きのモデルを作ります。
以下のようにモデルの中のmaterialstディレクトリの下に画像とテクスチャ用のORGEスクリプトを入れます。
gazebo1_lecture/
├── models/
│ ├── texture_box/
│ │ ├── materials/
│ │ │ ├── test_texture.material
│ │ │ └── texture1.png
│ │ ├── model.config
│ │ └── model.sdf
└── worlds/
└── world_test3.world
以下のようなOGREスクリプトを記述します(OGREはRvizの描画エンジンの名前です)。TestTextureという名前のテクスチャを定義してテクスチャのファイルとscaleを選択しています。
material TestTexture
{
technique
{
pass
{
texture_unit
{
// Relative to the location of the material script
texture texture1.png
// Repeat the texture over the surface (4 per face)
scale 0.5 0.5
}
}
}
}
-
TestTextureがこのテクスチャの名前です(modelのsdfファイル中で使います。) -
scaleは1面あたりに何枚分貼るかという指定です。以下の様に記述すると1つの面に2x2で張られます。分割数で指定するので、大きい面には大きくテクスチャが張られます。
テスクチャの画像ファイルは以下のようなものを使いました。

以下が本体のsdfファイルです。
<?xml version='1.0'?>
<sdf version="1.4">
<model name="texture_box">
<pose>0 0 0.5 0 0 0</pose>
<link name="link">
<inertial>
<mass>1.0</mass>
<inertia>
<ixx>0.083</ixx>
<ixy>0.0</ixy>
<ixz>0.0</ixz>
<iyy>0.083</iyy>
<iyz>0.0</iyz>
<izz>0.083</izz>
</inertia>
</inertial>
<collision name="collision">
<geometry>
<box>
<size>1 1 1</size>
</box>
</geometry>
</collision>
<visual name="visual">
<geometry>
<box>
<size>1 1 1</size>
</box>
</geometry>
<material>
<script>
<uri>model://texture_box/materials/test_texture.material</uri>
<name>TestTexture</name>
</script>
</material>
</visual>
</link>
</model>
</sdf>
<material>要素の中の<script>要素の中で<uri>でOGREスクリプトのファイル名を指定して<name>でテクスチャの名前を指定します。
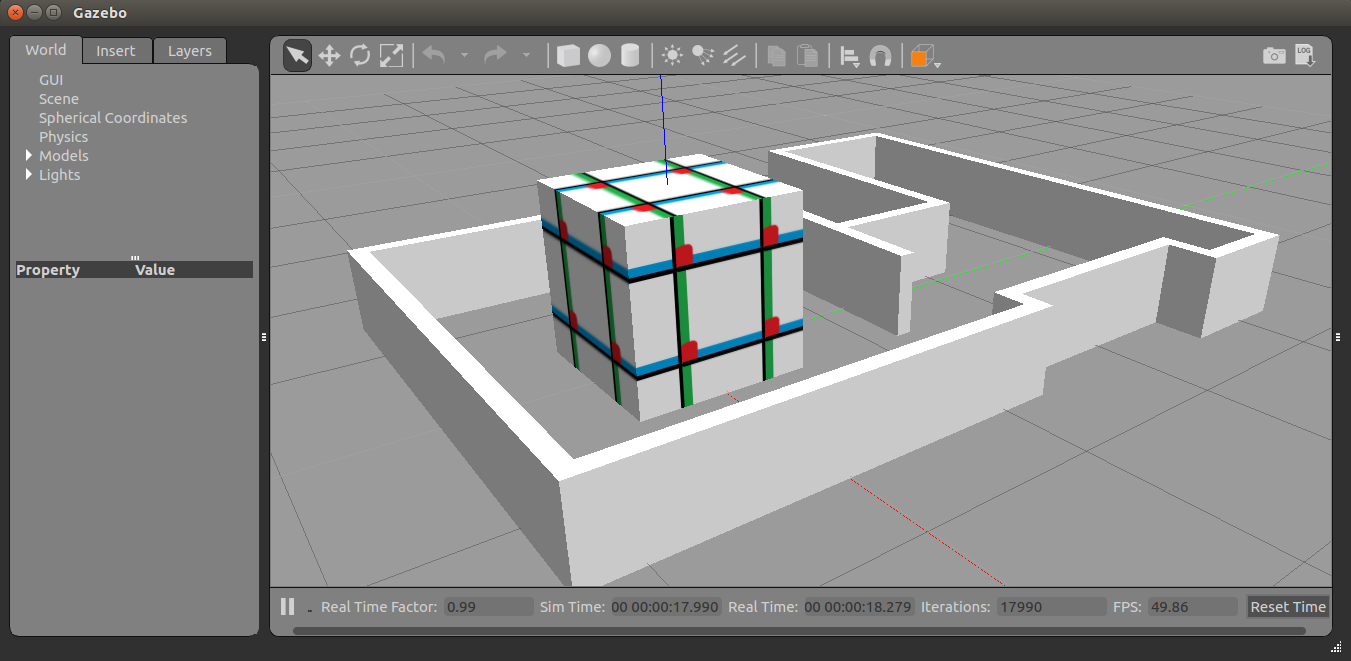
実行
以下のように表示されます。各ターミナルごとに実行前にsource ~/catkin_ws/devel/setup.bashを実行する必要があります。
roslaunch gazebo_ros empty_world.launch world_name:=texture_mesh_test.world verbose:=true
コメント
stlファイルで指定した形状にテクスチャを適用しようと記述しても、適用できません。このようなことをしたい場合はdaeファイルを作ってその中でテクスチャを適用する必要があります。
参考
Gazebo: Color And Texture Models
textureの使い方