環境
この記事は以下の環境で動いています。
| 項目 | 値 |
|---|---|
| CPU | Core i5-8250U |
| Ubuntu | 20.04 |
| ROS | Noetic |
インストールについてはROS講座02 インストールを参照してください。
またこの記事のプログラムはgithubにアップロードされています。ROS講座11 gitリポジトリを参照してください。
概要
printfデバッグはお手軽で有用な方法です。ROSでもprintfを使うことができますが、多数のROSノードが実行される状況では多数のノードのprintfが混ざってしまうために少々使いにくなります。
その代わりにROSではROS loggerという仕組みが用意されています。ターミナルで表示できるだけでなく、rqt_consoleというLogger情報を統合的に表示するツールもあります。このようなツールがあるためにROSではこのLoggerの仕組みを使い、通常のprintfは使いません。
ROS loggerをpublishするソースコード
ソースコード
loggerもprintfと使い方はほぼ変わらずROS_****("文字列", 引数, ...)という形になります。
# include <string.h>
# include <ros/ros.h>
int main(int argc, char** argv)
{
ros::init(argc, argv, "basic_logger");
ros::NodeHandle n;
ros::Rate loop_rate(1);
// if (ros::console::set_logger_level(ROSCONSOLE_DEFAULT_NAME, ros::console::levels::Debug))
// {
// ros::console::notifyLoggerLevelsChanged();
// }
int count = 0;
while (ros::ok())
{
ROS_DEBUG("log:%i", count);
ROS_INFO("log:%i", count);
ROS_WARN("log:%i", count);
ROS_ERROR("log:%i", count);
ROS_FATAL("log:%i", count);
ros::spinOnce();
loop_rate.sleep();
}
return 0;
}
launchファイル
<launch>
<node name="logger1" pkg="basic_lecture" type="basic_logger" />
<node name="logger2" pkg="basic_lecture" type="basic_logger" />
</launch>
CmakeListの設定
add_executable(basic_logger src/basic_logger.cpp)
target_link_libraries(basic_logger
${catkin_LIBRARIES}
)
ビルド
cd ~catkin_ws
catkin build
実行
各ターミナルごとに実行前にsource ~/catkin_ws/devel/setup.bashを実行する必要があります。
ノード単体での実行
roscore
rosrun basic_lecture basic_logger
表示例
以下のように表示されます。
Debugの表示方法
初期設定ではDEBUGレベルのメッセージは表示されません。これを表示するようにするには以下をターミナルに打ち込むか、
rosservice call /basic_logger/set_logger_level {"logger: 'ros', level: 'debug'"}
もしくはソースコード中に以下のように追記します(上のソースコードでコメントアウトされている部分でです)。
if( ros::console::set_logger_level(ROSCONSOLE_DEFAULT_NAME, ros::console::levels::Debug) ) {
ros::console::notifyLoggerLevelsChanged();
}
launch時でのROS logger
roslaunch basic_lecture logger.launch
表示
この場合はError、Fatalのレベルしか表示されません。INFO、WARNINGのレベルも表示させたいい場合はタグの属性でoutput="screen"とします
rqt_console
上記のlaunchを動かしたまま以下のコマンドを実行します。
rosrun rqt_console rqt_console
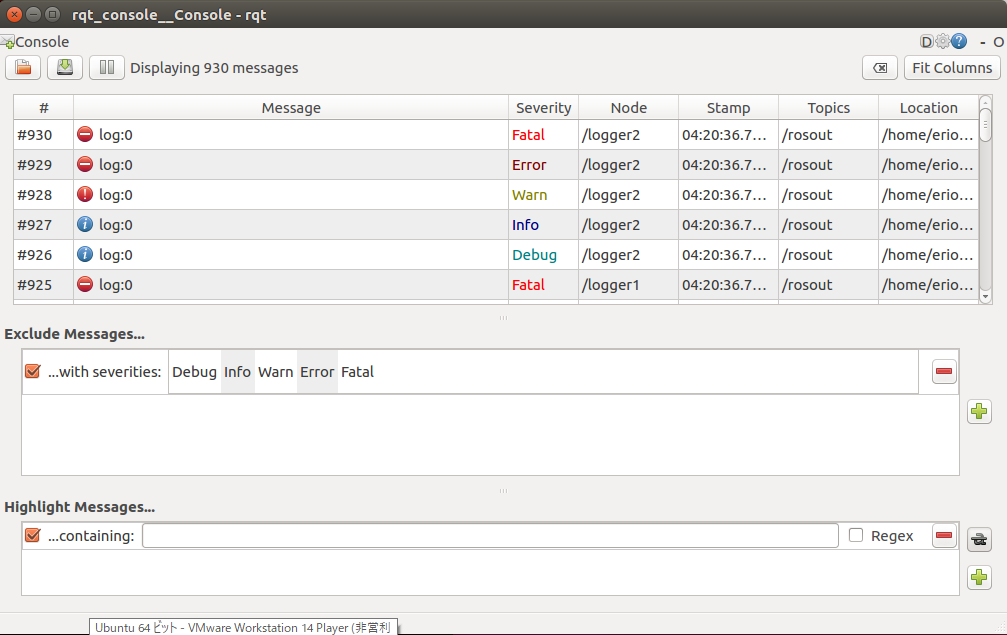
このようなGUI画面が表示されます。真ん中の「Exlude Messages」で表示するloggerを選択できます。
コメント
大規模でエラーの管理が難しくなるとprintfよりかは便利に使えるツールです。基本的に使うのはInfoとErrorの2つです。ノードを単体で動かしている時に見たいログをInfoで書き、機能に影響が起きるような状況が起きたらErrorでログを出力します。
5つのレベルがありますが、あまり厳格には使用方法は決まっていません。